
机动车驾驶员驾驶行为操纵动作模式的研究*
2015-04-12 06:52:52肖献强任春燕王其东
汽车工程 2015年9期
肖献强,任春燕,王其东
(合肥工业大学机械与汽车工程学院,合肥 230009)
2015186
机动车驾驶员驾驶行为操纵动作模式的研究*
肖献强,任春燕,王其东
(合肥工业大学机械与汽车工程学院,合肥 230009)
采用主成分分析法研究了驾驶员的操纵动作模式主要成分结构,采用Matlab编写了主成分分析算法对问卷调查获得的数据进行了分析,并着重选取问卷中超车、转向和并线3种驾驶行为的数据,分析得到这3种驾驶行为对应的驾驶操纵动作模式的主成分载荷矩阵和贡献率。结果表明:通过研究驾驶行为及其对应的驾驶操纵动作模式,可以发现对特定驾驶行为影响较大的驾驶操纵动作,进而根据两者之间的关系反向实现个性化驾驶行为的识别,为后续设计先进的辅助驾驶系统提供技术依据。
驾驶行为;主成分分析法;驾驶操纵动作模式
前言
根据对我国2001-2011年一次死亡3人以上的特大交通事故原因分析,驾驶员原因导致的交通事故占到90%以上。上述数据充分说明驾驶员在交通事故预防中的核心地位和作用,这与驾驶员在整个交通系统中扮演的角色有关,驾驶员不仅是道路交通系统信息的处理者、决策者,同时也是其调节者和控制者,其行为是否安全对于整个系统的状态有重大影响,驾驶员的个体因素在驾驶过程和道路交通中主要体现在其本身的驾驶行为和操纵动作[1]。
通过采集车辆传动机构和驾驶操纵动作传感器数据分析发现,车辆在某一特定时刻的状态和驾驶员的驾驶行为,是决定驾驶员前面一定时长内的驾驶操纵动作的基础。利用驾驶操纵动作和驾驶行为之间的内在关系,既可以通过驾驶操纵动作传感器数据融合实现驾驶行为识别预测,也可以利用驾驶操纵动作与驾驶行为之间的映射关系,研究基于驾驶行为识别的车辆主动安全系统。
文献[2]中通过采集驾驶操纵动作及车辆状态数据,利用隐马尔科夫模型与人工神经网络相结合的方法构建了转向驾驶意图辨析模型和方法。文献[3]中根据驾驶员的驾驶操纵动作,运用隐马尔科夫动态模型成功地预测了驾驶员即将实施的驾驶行为。文献[4]中利用驾驶员过去的驾驶操纵动作数据库研究开发了基于驾驶操纵动作模板的驾驶行为识别算法,并在识别的基础上结合车辆运行状态评估驾驶行为的安全性。近年来,主成分分析法在驾驶行为研究中的应用越来越多。文献[5]中利用主成分分析法与德尔菲结合法构建了驾驶行为主要影响指标集。
驾驶行为因驾驶员个体特性的不同,其实施过程中驾驶操纵动作存在一定的差异性,且驾驶操纵动作数据多且杂,如何从众多驾驶操纵动作数据中抽取出能够充分反映驾驶行为本质的驾驶操纵数据,减少数据量,提高驾驶行为识别预测算法的计算实时性,是驾驶行为识别预测用于车辆主动安全和先进辅助驾驶系统的关键技术之一。同时,研究驾驶行为及其对应的驾驶操纵动作主要成分,可为先进辅助驾驶及主动安全系统介入车辆干预和控制,预防交通事故的发生提供技术支撑和依据。
通过采用调查问卷和主成分分析法研究构建驾驶行为及其对应的驾驶操纵动作主成分通用性抽取算法,为研究利用驾驶操纵动作实现驾驶行为识别预测及构建个性化驾驶员操纵动作模式奠定基础,也为后续研究个性化驾驶员驾驶行为的驾驶操纵动作模式提供技术支撑。
1 常见驾驶行为及驾驶操纵动作
通过查阅相关资料,常见的驾驶行为有:(1)超车;(2)并线;(3)疲劳驾驶;(4)掉头转弯;(5)起动;(6)减速;(7)匀速行驶;(8)加速。
通过研究调查,本文中选择了如下8种驾驶操纵动作作为驾驶操纵动作集。
(1) 转向盘操纵动作 该动作直接反映了驾驶员的横向操控能力和稳定性。
(2) 加速踏板操纵动作 该操纵动作直接影响车辆的起动和正常行驶中的加减速。
(3) 转向盘操纵动作频率 该操纵动作反映了驾驶员的驾驶状态,是一个附加的观测动作数据。
(4) 制动踏板操纵动作 该操纵动作直接反映驾驶员减速或停车的行为。
(5) 离合器踏板操纵动作 该操纵动作是判断驾驶员转换驾驶行为的一个临界观测值。
(6) 换挡操纵动作 该操纵动作表明驾驶员对挡位的合理选择能力和状态转变。
(7) 左转向灯操纵动作 该操纵动作反映了驾驶员左向变道及转弯的表征参数。
(8) 右转向灯操纵动作 该操纵动作反映了驾驶员右向变道及转弯的表征参数。
利用主成分分析法分析以上8种驾驶操纵动作对驾驶行为的影响程度和驾驶行为形成贡献率。
2 实验数据的采集和处理
根据研究的需要,设计一种汽车驾驶员驾驶行为问卷调查表,如表1所示,来调查以上所列的驾驶操纵动作与各驾驶行为之间的内在关系,课题组给驾校教练员、个体驾驶员和职业驾驶员发放了800份问卷。通过对收回的286份有效问卷数据进行归类处理与分析,形成各驾驶行为驾驶操纵动作数据表。
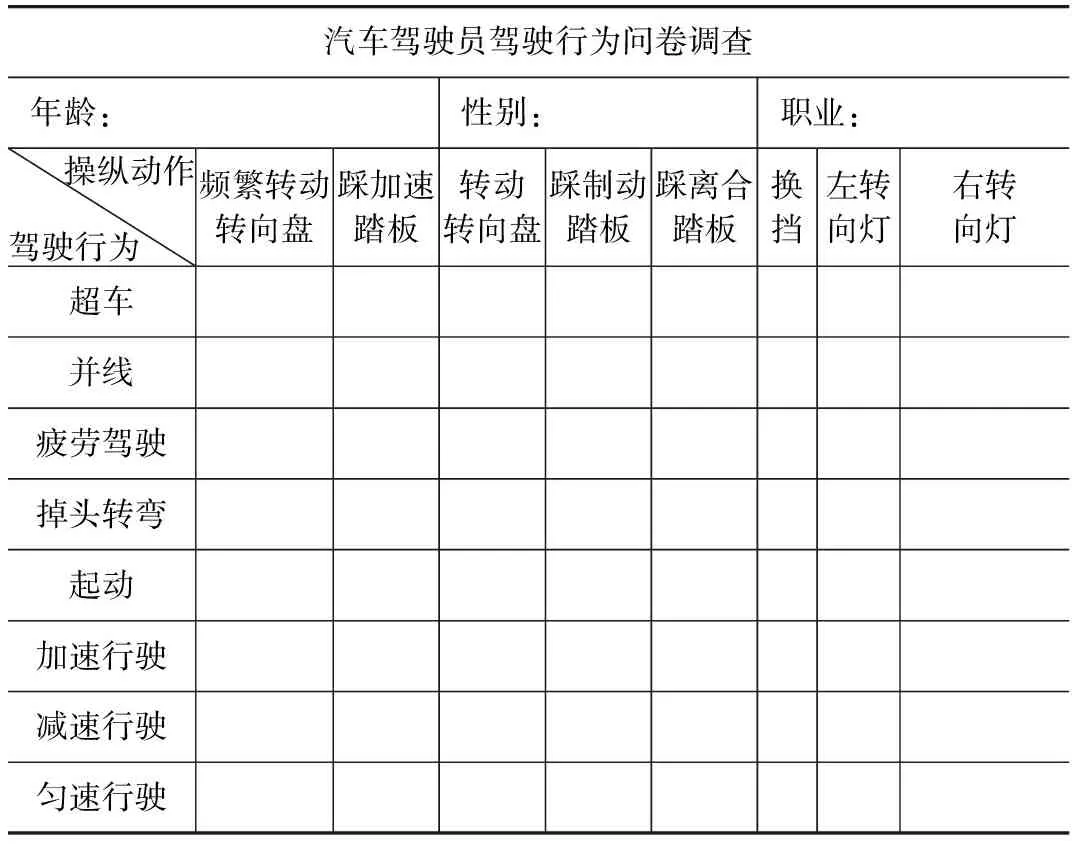
表1 汽车驾驶员驾驶行为问卷调查
3 主成分分析法
3.1 主成分分析法的基本原理
主成分分析法是数学上对数据降维的一种处理分析方法,其基本思想是设法将原来众多的具有一定相关性的指标X1,X2,…,Xn,重新组合成一组较少个数的互不相关的综合指标Fm来代替原来的指标,使其既能最大程度地反映原变量Xn所代表的信息,又能保证新指标之间保持相互无关(信息不重叠)[6]。
3.2 分析步骤
分别以o1,o2,…,o8依次表示转向盘、加速踏板、转向盘转动频率、制动踏板、离合踏板、换挡杆和左右转向灯等8种操纵动作,按以下步骤进行分析。
(1) 计算相关系数矩阵
(1)
式中rij(i,j=1,2,…,8)为原变量的oi与oj之间的相关系数,其计算公式为
(2)
(2) 计算特征值与特征向量
(3) 计算主成分贡献率和累计贡献率
主成分Zi的贡献率为
(3)
累计贡献率为
(4)
一般取累计贡献率达85%~95%的特征值λ1,λ2,…,λ8所对应的第1~第m(m≤8)个主成分。
(4) 计算主成分载荷矩阵
(5)
主成分载荷矩阵是主成分Zi与原始指标oi的相关系数R(Zi,oj),揭示了主成分与各原始指标之间的相关程度,它可以较好地解释主成分的表征意义。得到各主成分的载荷后,还可以得到各主成分的得分。
(6)
根据以上的主成分分析过程,通过Matlab将主成分分析算法编译成一个M文件,并且设计一个简易快捷的计算GUI界面,如图1所示,其主要功能是得到主成分贡献率、主成分载荷矩阵和碎石图。将所需分析的驾驶行为及驾驶操纵动作数据以Excel的形式导入即可直观地分析仿真结果[7-8]。
4 仿真结果
通过将问卷调查数据中的超车、转向和并线3种驾驶行为数据抽取出来,进行对应的驾驶操纵动作构成成分分析。分析结果的碎石图如图2所示,对应的主成分分析及载荷矩阵分别见表2和表3。
以按照特征值排列的大小序号为横轴,以特征值为纵轴作碎石图,如图2所示,在拐点之前是与大因子连接的陡峭折线,之后是与小因子相连的缓坡折线。一般取拐点前所有的因子及拐点后的第1个因子作为主成分,也可结合累积贡献率达到的百分比来确定主成分的个数。
4.1 计算各主成分评价指标值

表2 各个主成分贡献率和累积贡献率
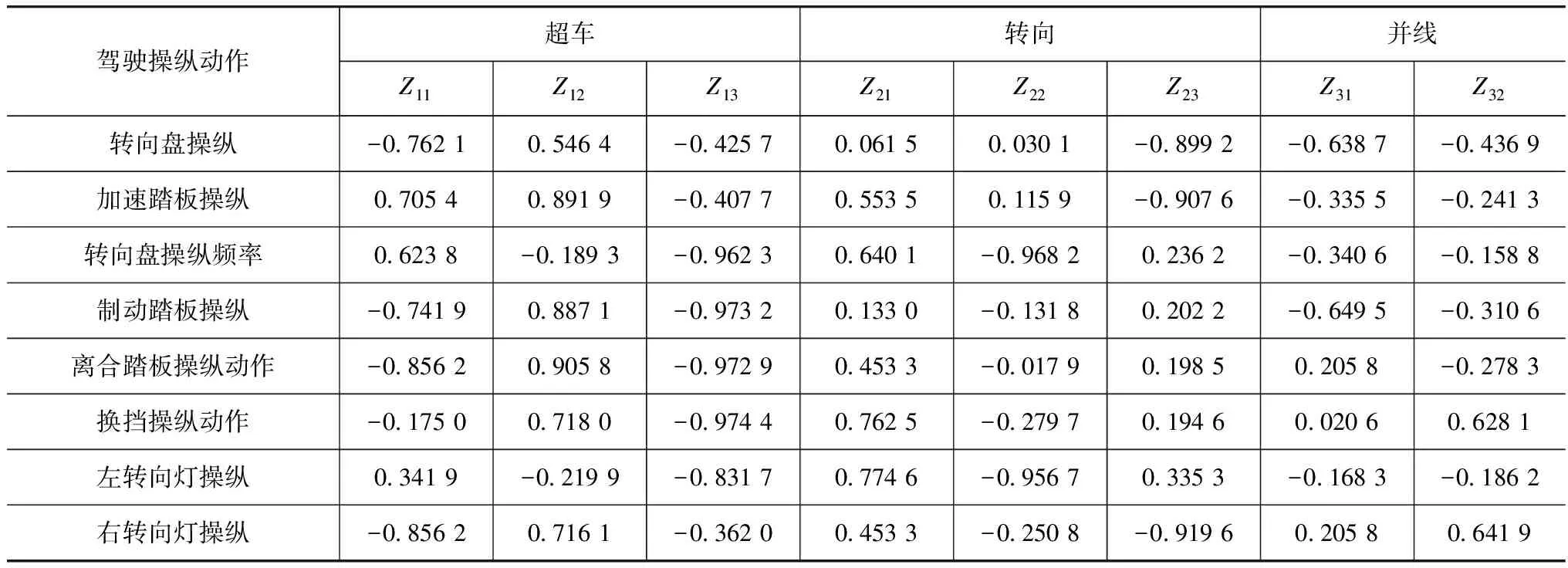
表3 主成分载荷矩阵
由图2和表3可知,实施超车驾驶行为,前3个驾驶操纵动作因子的累计贡献率为93.99%,大于85%,表明这3个因子可以概括原始数据的大部分信息,其主成分分别用Z11,Z12和Z13来表示。由表2可知,超车主成分分析的表达式为
(7)
(8)
(9)
由式(1)~式(3)可知:
(1) 第1主成分由离合踏板、转动右转向灯、转动转向盘、制动踏板及加速踏板操纵动作构成;
(2) 第2主成分由离合踏板、加速踏板、制动踏板、右转向灯和换挡操纵动作构成;
(3) 第3主成分由换挡、制动踏板、离合踏板、转动转向盘和左转向灯操纵动作构成。
转向驾驶行为的前3个驾驶操纵动作因子的累计贡献率为89.12%,大于85%,表明这3个因子可以概括原始数据的大部分信息,其主成分分别用Z21,Z22和Z23来表示,同样由表2可知,转向主成分分析的表达式为
(10)
(11)
(12)
由式(10)~式(12)可知:
(1) 第1主成分由左转向灯、换挡、转动转向盘和加速踏板驾驶操纵动作构成;
(2) 第2主成分由转动转向盘和左转向灯操纵动作构成;
(3) 第3主成分由右转向灯、加速踏板和转动转向盘操纵动作构成。
并线驾驶行为前两个驾驶操纵动作因子的累计贡献率为96.29%,大于85%,表明这两个因子可以概括原始数据的大部分信息,其主成分分别用Z31和Z32来表示,同样由表2可知,并线主成分分析的表达式为
(13)
(14)
由式(13)~式(14)可知:
(1) 第1主成分由制动踏板、转动转向盘和换挡操纵动作构成。
(2) 第2主成分由右转向灯和换挡操纵动作构成。
4.2 计算综合评价指标值
以每个主成分所对应的特征值占所提取主成分总的特征值之和的比例作为权重计算主成分综合模型,可计算得出3种驾驶行为超车(Z1)、转向(Z2)、并线(Z3)的综合评价指标的表达式为
(15)
(16)
(17)
(1) 实施超车驾驶行为时,X1,X2,X4和X8的系数绝对值较大,即转动转向盘、操纵加速踏板、制动踏板和右转向灯4个驾驶操纵动作对超车驾驶行为形成起至关重要的作用,尤其是加速踏板操纵动作对是否超车的影响较大,属于重要指标。
(2) 实施转向驾驶行为时,X2,X5,X6和X7的系数绝对值较大,即操纵加速踏板、离合踏板、换挡和左转向灯4个驾驶操纵动作对转向驾驶行为实施起着至关重要的作用,尤其换挡对是否处于转向操纵的影响较大,属于较为重要的指标。
(3) 实施并线驾驶行为时,X1,X4和X6的系数绝对值较大,也即转动转向盘、操纵制动踏板和换挡3个驾驶操纵动作对并线驾驶行为实施起着至关重要的作用,且3个驾驶操纵动作对于并线的影响都较大,属于较为重要的指标。
5 结论
通过问卷调查的形式采集驾驶员驾驶行为和操纵动作数据,采用Matlab编写驾驶行为驾驶操纵动作主成分分析算法,得出实施完成各类型驾驶行为的主要驾驶操纵动作成分、贡献率和主成分载荷矩阵,且可进一步得到综合评价指标值,提取出对于驾驶行为实施完成影响较大的驾驶操纵动作。该研究结果未来可在以下几个方面应用。
(1) 个性化驾驶员驾驶行为驾驶操纵动作模式的建立。通过抽取驾驶员的驾驶行为驾驶操纵动作主成分,构建基于有向图的个性化驾驶员驾驶行为和驾驶操纵动作模式,为进一步研究设计个性化的车辆辅助驾驶系统提供技术支撑。
(2) 目前,车辆辅助驾驶系统和主动安全系统可以针对驾驶员的驾驶行为进行评估,该研究成果可以为辅助驾驶和主动安全系统根据驾驶员的驾驶行为和实施完成此驾驶行为的操纵动作模式,制定介入车辆干预控制的具体预防策略和方法。
(3) 利用该研究的驾驶行为操纵动作主成分,构建驾驶员驾驶行为的驾驶操纵模式,利用驾驶操纵动作模式反向映射实现个性化驾驶行为的实时识别预测。
[1] Amardeep Sathyanarayana, Pnar Boyraz, et al. Driver Behavior Analysis and Route Recognition by Hidden Markov Models[C]. Proceedings of the 2008 IEEE International Conference on Vehicular Electronics and SafetyColumbus, OH, USA. September,2008:276-281.
[2] 宗长富,杨肖,王畅,等.汽车转向时驾驶员驾驶意图辨识与行为预测[J].吉林大学学报(工学版),2009,39(增刊1):27-32.
[3] Pentlad A, Liu A. Modeling and Prediction of Human Behavior[J]. Neural Computation,1999,11:229-242.
[4] Yoshifumi Kishimoto, et al. A Modeling Method for Predicting Driving Behavior Concerning with Driver’s Past Movements[C]. Proceedings of the 2008 IEEE International Conference on Vehicular Electronics and Safety Columbus,2008:132-137.
[5] 陈沅江,段莉,肖云.主成分分析法和德尔菲结合法的影响驾驶行为指标构建[J].安全与环境学报,2012,12(2):228-231.
[6] 石琴,郑与波,姜平.基于运动学片段的城市道路行驶工况的研究[J].汽车工程,2011,33(3):256-261.
[7] 张德喜,周予生.MATLAB 语言程序设计教程[M].北京:中国铁道出版社,2006.
[8] 常巍,谢光军.MATLAB R2007 基础与提高[M].北京:电子工业出版社,2007.
A Research on the Driving Operation Modes of Vehicle Drivers
Xiao Xianqiang, Ren Chunyan & Wang Qidong
SchoolofMachineryandAutomobileEngineering,HefeiUniversityofTechnology,Hefei230009
Principal component analysis (PCA) is adopted to study the main constitution structures of driver’s operation modes and a PCA algorithm created with Matlab is used to analyze the data obtained by questionnaire, from which three sets of driver behavior data of overtaking, steering and cutting-in maneuver are in particular selected for analysis to obtain the loading matrix and contribution rate of PCA corresponding to those three operation modes. The results show that through the study on driver’s behaviors and corresponding operation modes, the driving operation actions having more significant effects on specific driving behaviors can be found and hence the identification of personalized driving behaviors can be achieved inversely based on the relationship between them, providing a technique basis for subsequent design of advanced driver assistant system.
driving behavior; principal component analysis; driving operation modes
*教育部高等学校博士学科点专项科研基金(20130111120023)和国家自然科学基金(51175135)资助。
原稿收到日期为2013年8月28日,修改稿收到日期为2014年4月19日。
猜你喜欢
车主之友(2022年6期)2023-01-30 07:58:16
军事运筹与系统工程(2020年2期)2020-11-16 01:11:04
黄河之声(2019年23期)2019-12-17 19:08:43
汽车实用技术(2019年17期)2019-09-21 03:46:32
模具制造(2019年3期)2019-06-06 02:10:58
军事运筹与系统工程(2018年3期)2018-03-26 06:33:02
黄河之声(2017年13期)2017-01-28 13:30:17
信息记录材料(2016年4期)2016-03-11 15:22:27
中亚信息(2016年10期)2016-02-13 02:32:45
中学生数理化·中考版(2012年5期)2012-04-29 00:44:03
