未知动态复杂环境下群机器人协同多层围捕
2015-04-06 08:23张红强周少武欧阳普仁吴亮红
电工技术学报 2015年17期
张红强 章 兢 周少武 欧阳普仁 吴亮红
(1.湖南大学电气与信息工程学院 长沙 410082 2.湖南科技大学信息与电气工程学院 湘潭 411201 3.湖南科技大学机电工程学院 湘潭 411201)
未知动态复杂环境下群机器人协同多层围捕
张红强1,2章 兢1周少武2欧阳普仁3吴亮红2
(1.湖南大学电气与信息工程学院 长沙 410082 2.湖南科技大学信息与电气工程学院 湘潭 411201 3.湖南科技大学机电工程学院 湘潭 411201)
针对未知动态复杂环境下非完整移动群机器人多层围捕,提出了一种基于简化虚拟受力模型的多层协同自组织围捕方法。首先设计了未知杂乱环境下目标的运动模型,然后通过对杂乱环境下围捕行为的研究,构建了简化虚拟受力模型。基于此受力模型,提出了个体循障和多层协同围捕运动控制方法,该方法只需目标和两最近邻位置信息,计算简单,易于实现。最后证明了系统的稳定性,并获得了参数设置范围。不同情况下的仿真验证及对比结果表明,所提的多层协同围捕方法可使群机器人在未知复杂环境下保持较好的多层协同围捕队形,并具有良好的避障性、高扩展性和灵活性。
非完整移动机器人 群机器人 简化虚拟受力模型 队形保持 多层围捕
0 引言
群机器人通过简单个体之间的协同可以完成复杂的任务,这是其最重要的有利之处[1]。群机器人可广泛应用于工业、医学、军事、航天等领域的运输、加工、监测、修复、巡逻、侦察、监护、搜索、收集及搬运等任务[2-7]。因此,如何设计简单规则使大规模个体之间以及个体与环境之间的局部交互协同产生具有鲁棒性、高扩展性和灵活性的期望的群体行为成为群机器人学研究的核心所在[8-11]。
近年来,有关群机器人围捕的研究已经报道了许多。熊举峰等[12]针对群机器人围捕问题提出基于虚拟力的方法,实现了无非凸障碍物环境下对静态目标的多层多目标围捕和动态目标的多层围捕。L.Blazovics等[13]针对群机器人单目标单层围绕问题提出基于规则的算法。Z.Shi等[14]结合PSO和果蝇算法来实现群机器人在凸障碍物环境下对目标的捕获。L.Schenato等[15]针对群机器人多目标围捕问题提出利用通信的传感器网络来解决。L.C.Pimenta等[16]针对无动态非凸障碍物环境中群机器人对静态目标的多层围绕提出基于人工物理和势场函数利用平滑粒子流体动力学的方法。M.Kubo等[17]针对无障碍物环境下对多目标的单层围绕问题提出一种基于规则的群机器人算法。黄天云等[18]基于松散偏好规则(Loose-preference Rule,LP-rule)给出了目前较高效的无障碍物环境下单层围捕方法。张红强等[19]针对文献[18]的不足提出了基于简化虚拟受力模型的非完整移动群机器人凸环境下单层围捕方法。然而据我们所知,在未知动态复杂环境中(包括有动态变形障碍物、静态凸和非凸障碍物等)使用一群机器人进行多层围捕的研究,目前鲜有报道。
实现大规模群机器人多层围捕的挑战在于如何使得每个机器人自组织地实现层与层之间的移动,即在内层机器人拥挤时自动移动到外层,内层机器人稀少时自动移动到内层,并在有复杂障碍物环境中实现大规模机器人避障的同时保持多层围捕队形,而且每个机器人的自组织移动仅根据目标点和两最近邻位置信息来决策。
本文根据未知凸和非凸及动态变形障碍物环境中群体协同多层围捕的运动特点,基于目标点及最近邻两个对象(可能是机器人、动态变形障碍物、静态凸或非凸障碍物)的位置信息,完善文献[19]基于人工物理方法的简化虚拟受力模型,设计了多层围捕控制算法和循障算法,可以在包含动态变形等复杂障碍物环境中做到良好避障并保持多层围捕队形。不同情况下的仿真结果表明,本文给出的基于简化虚拟受力模型在未知复杂环境下的多层协同围捕方法是切实可行的,其稳定性分析有利于系统参数设置,可形成振荡较小且轨迹较优的围捕过程。
1 模型构建
为了实现群机器人协同多层围捕,本节给出个体运动学方程和相关函数。
1.1 机器人运动模型及相关函数
考虑一群含有m个完全相同的轮式移动机器人,假设每一个机器人的结构如图1所示。纯粹转动不打滑的机器人hj的运动学方程描述为
(1)
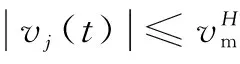
图1 轮式移动机器人hj原理图Fig.1 Schematic model for the wheeled mobile robot hj
多层协同围捕过程中目标和对象(包括机器人、各种障碍物)的施力函数分别为
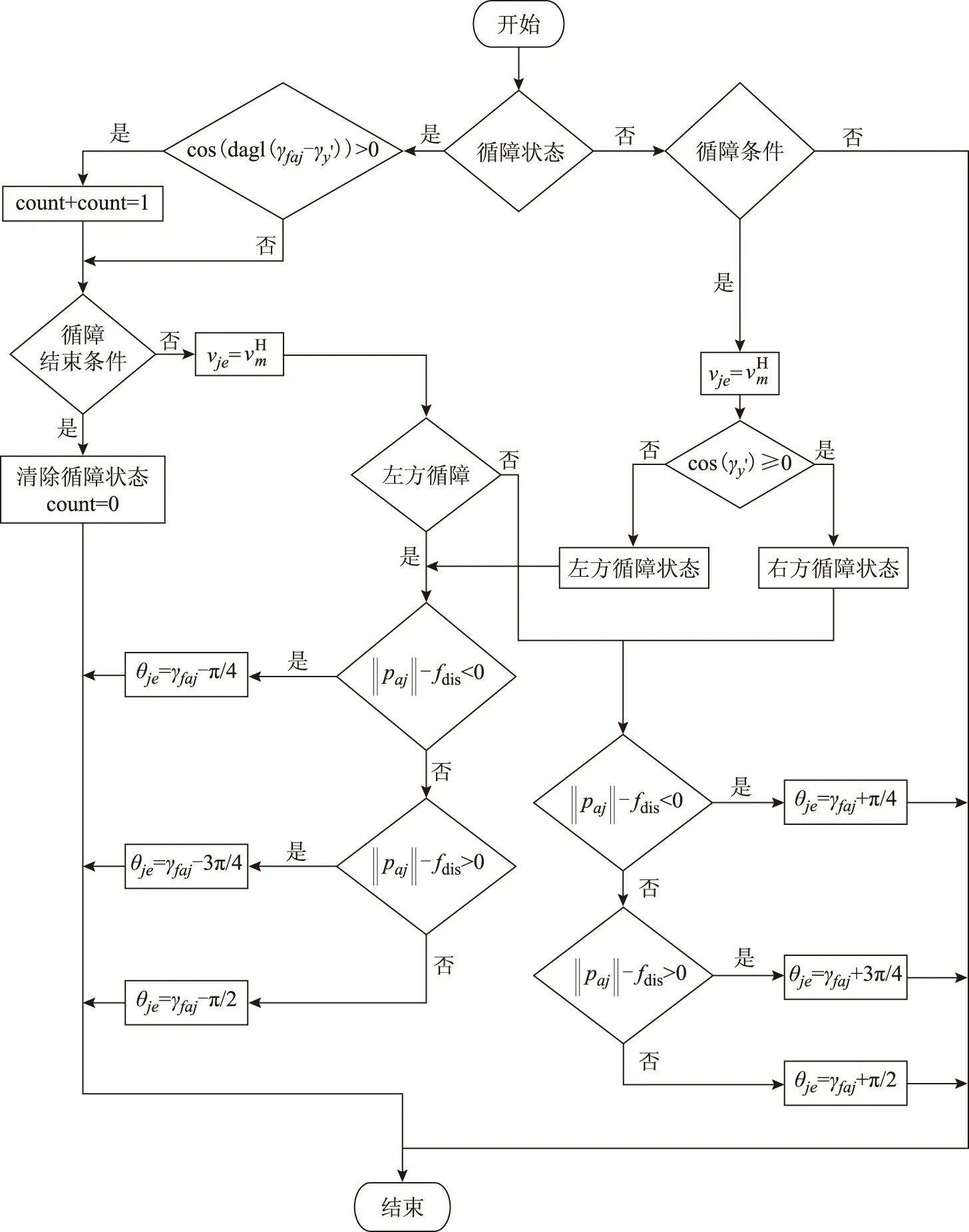
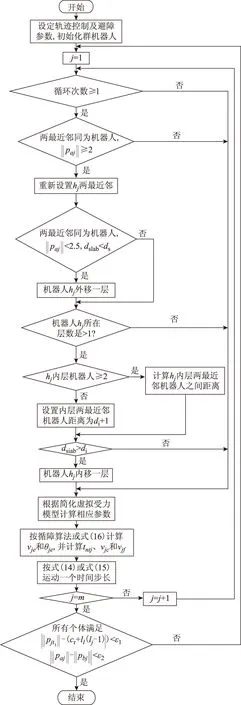
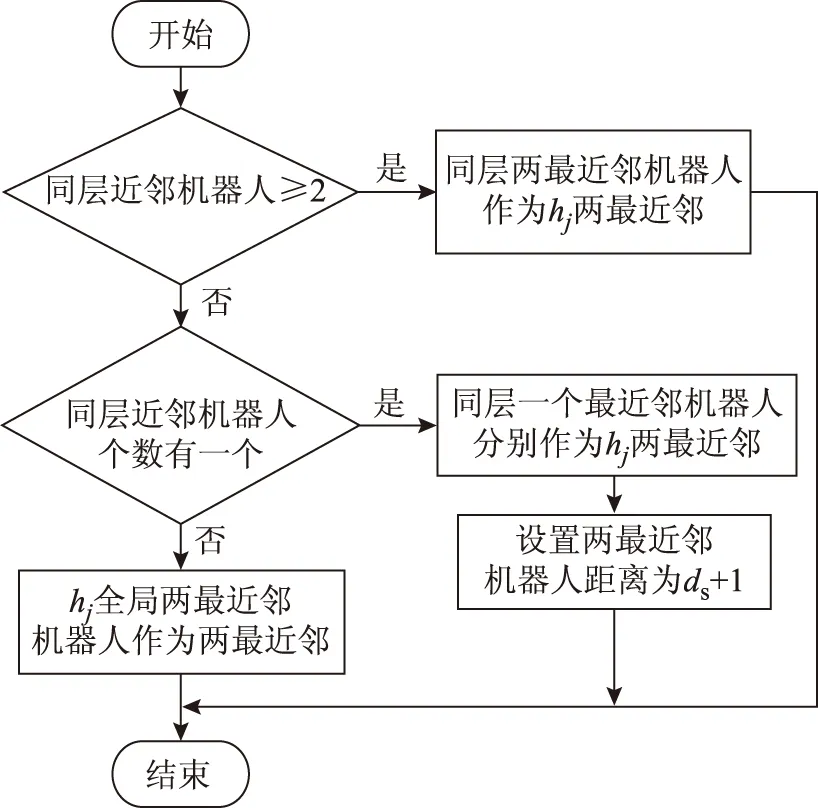
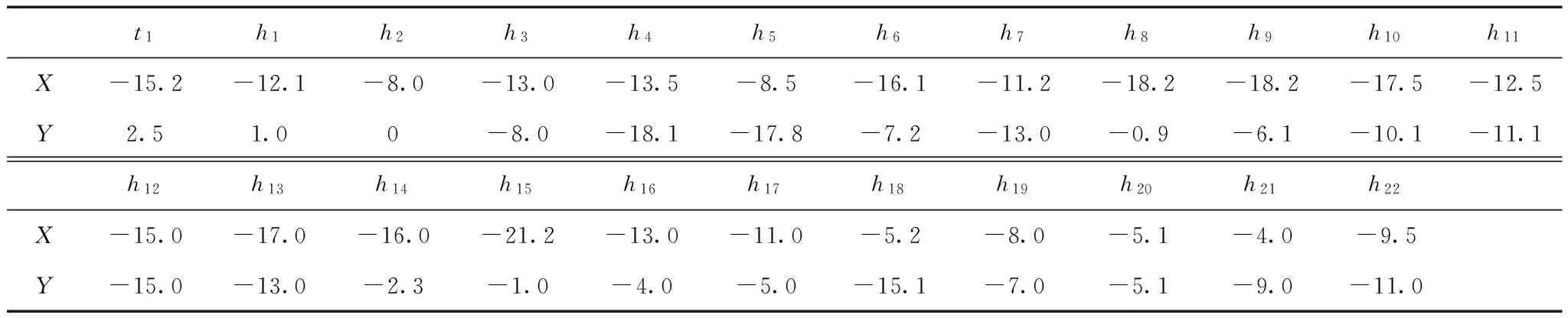
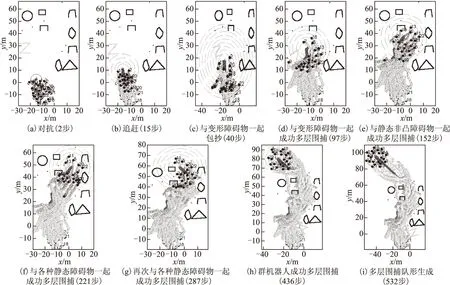
ft(z)=[c1(z-cr)+c2](nc c1{z-[cr+l1](lj-1)}(nc≥l) (2) (3) 对于不满足循障条件即易避开的障碍物,给定映射函数 (4) 式中σ为一个cos(·)函数值。通过此函数可使较前方的障碍物产生较大的斥力,实现了仿生避障特点。 假设有向线li和lj的方向角分别是γi和γj[20],为了确定这两有向线之间的角度,计算li到lj的角γij[21]为 γij=dag1(γi-γj) (5) 式中dag1(·)函数为 dag1(x)= (6) 式中sign(·)为符号函数。 1.2 多层协同围捕任务模型 受狼群捕食行为启发,研究人员开展了群机器人系统[18,19]的围捕研究。本文重点研究发现目标或猎物之后的围捕行为,主要包括目标锁定、对抗、追捕和多层协同围捕成功[18]4个阶段。未知复杂环境下目标的数学模型构建如下。 (7) 由上述描述和式(7)给定障碍物环境下被围捕目标的运动方程 (8) 本文给定了动态复杂障碍物环境下势角的计算以及目标的运动方程。本文所描述的围捕过程与文献[19]基本一致,不同的是本文围捕队形在避障或通过狭窄通道时会增加层数以使整个群体保持队形顺利避障或通过狭窄通道,而文献[19]只是让机器人之间距离变得更小来避障或通过狭窄通道,因此其避障或通过狭窄通道的能力有限;另外本文群体机器人可以避开静态或动态非凸障碍物,而文献[19]没有考虑这些情况。 本文群机器人围捕研究各个个体在非凸动态复杂障碍物环境中,如何根据其周边对象和猎物自主确定其运动,避开静态非凸和凸以及动态变形障碍物并保持多层围捕队形,而且在有限时间内以一定准确度均匀分布在猎物的多层有效围捕圆周上。本文完善文献[19]的简化虚拟受力模型,设计了多层协同围捕算法和循障算法,使得整个群体实现未知动态复杂环境下的自组织协同多层围捕。 2.1 简化虚拟受力模型 在未知复杂环境中,假设hj可以得到本身、目标t1和两最近邻对象(可能是机器人、静态非凸或凸以及动态变形障碍物)aj、bj在全局坐标系xOy中的位置信息,如图2所示。 图2 简化虚拟受力模型Fig.2 Simplified virtual-force model 图2在以hj为原点的相对坐标系x′O′y′中,位置矢量pjt1、paj、pbj、pab分别定义为pjt1=t1-hj、paj=hj-aj、pbj=hj-bj、pab=bj-aj。ft1j、faj和fbj分别为hj受到目标t1的引力或斥力作用和两最近邻对象aj、bj的斥力作用。pjt1所在方向为y′轴正半轴方向,其到x轴正半轴的有向角为γy′,γx′=γy′-π/2为x′轴正半轴方向角。γft1j为 (9) faj和fbj即矢量paj、pbj到x轴正半轴的有向角分别为对象的斥力角γfaj和γfbj。γfajx′和γfbjx′是hj的两最近邻对象斥力偏角,分别是γfajx′=dagl(γfaj-γx′)和γfbjx′=dagl(γfbj-γx′)。fabj是hj在x′轴上受到的斥力,fabj为 fabj=faj(‖paj‖)φ(cos(γfajx′))+ fbj(‖pbj‖)φ(cos(γfbjx′)) (10) 式中faj(‖paj‖)和fbj(‖pbj‖)是两对象aj、bj的施力函数,按式(3)计算。γfabj为 (11) fx′y′j是hj的整体受力,fx′y′j到x轴正半轴的有向角为其方向角γfx′y′j,fx′y′j为 (12) 式中:ft1j(‖pjt1‖)是目标t1的施力函数,按式(2)计算;fabj按式(10)计算。 由以上描述直接得到当目标静止时hj的需求速度为 vx′y′j=fx′y′j (13) 2.2 基于简化虚拟受力模型的个体控制输入设计 设θje是期望运动方向,tntj是hj转至期望运动方向θje所需时间,Г是运动周期,vjf是机器人实际可达速度,未知复杂环境中多层围捕时各机器人hj即式(1)的运动控制输入为 当Γ≤tntj时,机器人只进行转向 (14) 当Γ>tntj时,机器人转向后平动 (15) 设简化虚拟受力模型中‖paj‖≤‖pbj‖,fdis为循障运动时与aj之间的距离,按机器人循障算法流程图(如图3所示)确定hj整体期望速度vje和θje,从而避开满足循障条件的最近邻对象(如机器人、动态变形障碍物、静态非凸和凸障碍物),即aj、bj可以为机器人或障碍物。 图3 机器人循障算法流程图Fig.3 The flow chart of robots following obstacles algorithms 图3中循障条件是‖paj‖≤1.3且‖pab‖<2.6, 循障结束条件是cos(dagl(γfaj-γy′))>0出现3次(即count>2)或‖pjt1-cr<-1或‖paj‖>2且‖p‖ab>4。 如果处于非循障状态且不满足循障条件或已结束循障状态,则vje、θje为 (16) 无论是否处于循障状态,tntj和vjf为 (17) (18) 以上公式中不含有时间的函数均指kΓ时刻的计算量且在[kΓ,(k+1)Γ]上保持不变,其中θje和θjbef分别为下一步期望的运动方向和上一步的运动方向;tntj为计算按最大角加速度和最大角速度进行转向所需时间;tntj1为按最大角加速度加速至最大角速度所需时间;tntj2为由达到最大角速度后至转向期望运动方向θje所需时间;vjc为按期望速度进行了补偿的速度。 2.3 多层协同围捕算法步骤 根据1.2节构建的围捕环境和由式(8)构建的目标t1的运动数学方程,基于简化虚拟受力模型的群机器人多层协同围捕算法主流程图如图4所示。重新设置hj两最近邻流程图如图5所示。 图4中dslab是两最近邻之间的距离,dsiab是内层两最近邻之间距离,这里ds是允许hj外移一层时的同层两最近邻之间允许的最大距离,ds=5;di是允许hj内移一层时内层两最近邻机器人之间的最小距离,di=8。ds 本文借鉴文献[18]所用稳定性分析方法。为了推导算法在不满足循障条件的环境中收敛时所满足的条件,系统偏差分解为目标距离偏差δjy′=‖pjt1‖-[cr+ll(lj-1)]和两最近邻机器人距离偏差δjabx′=(sfajx′‖paj‖+sfbjx′‖pbj‖+djo)/2, 其中sfajx′=sign(-cos(γfajx′)),sfbjx′=sign(-cos(γfbjx′)), sign(·)为符号函数,djo=-sfajx′‖pajox′‖-sfbjx′‖pbjox′‖, ‖pbjox′‖和‖pajox′‖是hj在以bj和aj为左右两最近邻时受力平衡点hjo到bj和aj之间的距离,‖pbjox′‖和‖pajox′‖满足有效围捕圆周上三角形角边之间的关系即式(19),并具有惟一解 图4 多层协同围捕算法主流程图Fig.4 The main flow chart of multilayer cooperative hunting algorithm 图5 重新设置hj两最近邻流程图Fig.5 The flow chart of resetting the two nearest neighbors of hj (19) 式中:γfbjox′、γfajox′分别为hjo受到bj、aj的斥力到以hjo为原点的x′轴正半轴的方向角,范围分别为(-π/2,0),(-π/2,-π);k′=1,2,3;k″=1,2,3。 当δjy′=0,δjabx′=0(j=1,2,…,m)时,围捕理想队形形成。因此,获取自组织围捕系统的稳定性条件,只需要推导δjy′→0,δjabx′→0(j=1,2,…,m)时系统所需要满足的条件。将上述系统偏差定义离散化为 δjy′(k)=‖pjt1(k)‖-[cr+ll(lj(k)-1)] j=1,2,…,m δjabx′(k)=[sfajx′(k)‖paj(k)‖+sfbjx′(k)‖pbj(k)‖+ djo(k)]/2j=1,2,…,m 式中:sfajx′(k)=sign(-cos(γfajx′(k)));sfbjx′(k)=sign(-cos(γfbjx′(k)));djo(k)=-sfajx′(k)‖pajox′(k)‖-sfbjx′(k)‖pbjox′(k)‖。 vy′j(k)=ft1 j(k)=(c1(‖pjt1(k)‖-cr)+c2)(nc c1(‖pjt1(k)‖-(cr+ll·(lj(k)-1)))(nc≥l) (20) vx′j(k)=fabj(k)=faj(‖paj(k)‖)φajx′(k)+ fbj(‖pbj(k)‖)φbjx′(k) (21)式中:φajx′(k)=φ(cos(γfajx′(k))),φbjx′(k)=φ(cos(γfbjx′(k)))。 因此得到个体的自主运动偏差方程为 δjy′(k+1)=δjy′(k)-vy′j(k)Γ (22) δjabx′(k+1)=δjabx′(k)-vx′j(k)Γ (23) 定理1 在不满足循障条件的障碍物环境中,如果所有机器人满足nc≥l,0 证明:将式(20)代入式(22),有 δjy′(k+1)= δjy′(k)-{[c1(‖pjt1(k)‖-cr)+c2](nc c1(‖pjt1(k)‖-[cr+ll(lj(k)-1)])(nc≥l)}Γ (24) 当nc≥l时,式(24)成为: δjy′(k+1) =δjy′(k)-c1(‖pjt1(k)‖- (cr+ll(lj(k)-1)))Γ =δjy′(k)-[c1δjy′(k)]Γ =δjy′(k)(1-c1Γ)) (25) ΔVy′(Δy′(k)) =Vy′(Δy′(k+1))-Vy′(Δy′(k)) ΔVy′(Δy′(k))为负定时需满足0 定理2 在不满足循障条件的障碍物环境中,如果每个机器人满足0<Γd1μ<2和式(23),则系统原点平衡状态即Δabx′(k)=[δ1abx′,δ2abx′,…,δmabx′]T=0为大范围渐近稳定,其中 μ=maxμj(k) δjabx′(k)>0 j=1,…,m;n≥1 k=0,1,…,n;k′=1,2,3;k″=1,2,3 证明:将式(21)代入式(23)可得 δjabx′(k+1)=δjabx′(k)-fabj(k)Γ =δjabx′(k)-[faj(‖paj(k)‖)φ(cos(γfajx′(k)))+ fbj(‖pbj(k)‖)φ(cos(γfbjx′(k)))]Γ δjabx′(k+1)=δjabx′(k)-Γd1μj(k)δjabx′(k) =δjabx′(k)(1-Γd1μj(k)) (26) 式中: δjabx′(k)>0 ΔVabx′(Δabx′(k))=Vabx′(Δabx′(k+1))-Vabx′(Δabx′(k)) 其中假设μ在n1步出现最大值,即μ=maxμj(k)(j=1,2,…,m;k=0,1…,n1), 如果到n1步不是μ的最大值,则最迟在n1+q步得到μ的最大值。令n=n1+q, 有μ=maxμj(k)(j=1,2…,m,k=0,1,…,n)。 ΔVabx′(Δabx′(k))为负定需要满足0<Γd1μ<2。 另外当‖Δabx′(k)‖→∞时,Vabx′(Δabx′(k)→∞。 由离散系统Lyapunov稳定性定理得:原点平衡状态Δabx′(k)=0为大范围渐近稳定,而0<Γd1μ<2是原点平衡状态为大范围渐近稳定的一个充分条件,定理得证。 j=1,…,m;n′≥1;k=0,1,…,n′ (27) max(tmit,tmahv)<Γ (28) (29) 由于猎物在实际逃逸过程中并不是每一步都转180°,个体也不需要每步都转动180°,因此对于多数实例Γ在小于式(28)或式(29)所给定的下限时也可以成功围捕。 对于满足循障条件的含有静态非凸和凸障碍物环境中系统的稳定性分析,这里需要指出的是只要循障的机器人可以保持对目标位置的即时更新,循障机器人就可以安全避开非凸和凸障碍物,之后只要机器人时间步长Γ满足式(28)或式(29),则系统同样是稳定的。退一步讲,对于循障的机器人如果失去了对目标的感知和同伴的通信而走失了,如果走失个数较少,因为群机器人个体数目较多,也不会影响系统的稳定性,这也体现群机器人系统良好的鲁棒性。 另外,对于满足循障条件的变形障碍物动态环境中系统的稳定性分析,在这里机器人与变形障碍物之间的运动分两种极端的情况:一种是两者同向运动,一种是两者相向运动。只要满足了上述两种情况下的障碍物允许运动的速度最大值(取两种情况下的较小值作为障碍物速度最大值),且障碍物的任何部分的线速度不大于该值,而不管其作何种运动,由于机器人在与当前障碍物点aj连线的垂直方向都有一个分量的速度并且始终保持对目标位置的更新,机器人都可以循障成功并最终加入围捕队形,整个系统是稳定的。 (30) (31) 对于循障的机器人如果失去了对目标的感知而走失了,或者因变形障碍物的实际速度大于所限定的速度,导致循障机器人被障碍物损坏,若走失或损坏个数较少,因为群机器人个体数目较多,也不会影响系统的稳定性,这也体现群机器人系统良好的鲁棒性。 由定理1、2、3及以上分析可以推断出整个围捕群机器人系统在动态的非凸障碍物复杂环境中是稳定的,并具有良好的可扩展性。 根据1.2节的围捕任务模型,本节主要研究同一算法在含有动态变形障碍物和非凸静态障碍物的不同未知动态复杂环境下群机器人围捕,通过仿真一(4.1节)和仿真二(4.2节)的对比研究来验证本文所提算法的可扩展性、鲁棒性、灵活性及避障性能。仿真中的系统参数设置如表1所示。围捕机器人对不同近邻对象进行避碰/避障参数值如表2所示,目标避障参数值如表3所示。 4.1 仿真一 表1 围捕系统参数值 表2 围捕机器人避碰/避障参数值 表3 目标避障参数值 表4 仿真一中群机器人初始位置坐标 多层围捕仿真轨迹如图6所示,其运动过程整体上与文献[19]第一个仿真相似,不同的是本仿真少了驱赶过程。另外由于障碍物的影响还出现了与障碍物一起包抄和成功多层围捕等过程,如图6c~图6g所示。 图6 未知复杂环境下群机器人自组织多层围捕Fig.6 Swarm robots self-organizing multilayer hunting in unknown complex environments 基于SVF-model的循障算法同样可以成功避开静态非凸U形障碍物。h17大约在300步左右陷入U形障碍物中,在337步之时满足了循障条件,根据cos(γy′)<0确定了左方循障状态进行循障。h17在357步时满足循障结束条件(即cos(dagl(γfaj-γy′))>0出现3次)后采取围捕控制并躲开左右两边凸形障碍物后,迅速加入围捕队形中,如图6h所示。而当h9和h17不在围捕队形中时,剩下的群体仍能自组织围捕目标,说明算法具有较好的鲁棒性,如图6f和图6h所示。 另外,值得注意的是,机器人会自动增加有效围捕圆周层数来避免相碰并顺利通过狭窄的通道,如图6g所示,有效围捕圆周层数增加至6层。而当环境较宽松时,机器人会自动减少有效围捕圆周层数至最小,如图6i所示,有效围捕圆周层数减少至3层。 多层协同围捕和障碍物环境的复杂性导致本仿真涌现出了众多Leaders,如最内层按涌现顺序分别是h15、h2、h13和h18,如图6c、图6e和图6f所示。整个群体在环境内存在静态非凸和凸以及动态变形障碍物的情况下,仍然可以严格避障/避碰,实现多层围捕,体现本算法具有较好的避碰/避障性能和鲁棒性。 4.2 仿真二 本小节考虑更加复杂的未知动态环境,环境中包括一个动态变形障碍物即同时做平动和转动的“米”字,8个呈现“U”、“E”、“F”、“G”、“K”、“W”、“N”和“Y”等各种非凸形状的静态障碍物。 多层围捕仿真轨迹如图7所示,其运动过程及原因与第一个仿真相似。不同的是由于本仿真中非凸环境复杂度和机器人数目的增加导致了避障过程和协同多层围捕过程更加复杂。例如,为了避开运动中的“米”形障碍物,h27陷入“米”形障碍物后,分别于158步、206步、218步、230步、241步和289步先后6次进入左循障状态,并分别于190步、213步、225步、238步、279步和312步结束左循障状态,连续循障了4个动态变形的“V”形障碍物才避开了“米”形障碍物,共计用时154步,如图7f所示。而仿真一中h9只用了39步就完成对变形“Z”形障碍物的避障,实际上其只循障了一个动态变形的“V”形障碍物。 表5 仿真二中增加的机器人初始位置坐标 图7 未知复杂环境下群机器人自组织多层围捕Fig.7 Swarm robots self-organizing multilayer hunting in unknown complex environments 为了避开“G”形障碍物,有近10个机器人从最开始的242步开始循障,一直到412步结束,如图7g所示。而为避开“E”形障碍物,有近4个机器人从最开始的344步开始循障,一直到398步才结束。值得关注的h6是连续循障了“E”所包含的两个“U”形障碍物共耗时45步才避开了它,如图7g所示。而为避开 “K”形障碍物,有近6个机器人从最开始的414步开始循障,一直到531步才结束,如图7h所示。 为了避开“W”形障碍物,有近13个机器人从492步开始循障,一直到666步结束,如图7h所示。而仿真一中避开非凸障碍物只用了20步。当循障机器人不在围捕队形中时,剩下的群体仍能自组织围捕目标,说明算法具有较好的鲁棒性,如图7e、图7f和图7g所示。 另外,与仿真一相同的是,机器人会自动增加有效围捕圆周层数来避免相碰,并顺利通过狭窄的通道,如图7f所示,有效围捕圆周层数增加至10层。而当环境较宽松时,机器人会自动减少有效围捕圆周层数至最小,如图7i所示,有效围捕圆周层数减少至4层。 机器人数目的增多和非凸环境复杂性的增加导致本仿真涌现出了众多Leaders,如最内层按涌现顺序分别是h15、h2、h1、h9和h18,如图7c、图7e、图7f和图7g所示。整个群体在机器人数目比仿真一增加1倍且在更加复杂的非凸动态环境下仍然可以严格避障避碰实现多层围捕,除了体现本算法具有较好的灵活性和可扩展性以外,还具有较好的避碰/避障性能和鲁棒性。 基于SVF-model的多层协同围捕算法与基于LP-rule[18]及基于SVF-model[19]的单层围捕算法相比优势如下: 1)考虑到机器人实际物理尺寸。 考虑了实际机器人的尺寸对多层有效围捕圆周上机器人个数的限制,更加符合围捕实际情况。而单层围捕算法没有考虑有效围捕圆周上机器人个数的限制。 2)高可扩展性。 多层协同围捕比单层围捕更易扩展机器人的数量,作者曾经做过500个机器人的多层围捕仿真,均可实现多层均匀围捕,而如果用单层围捕来实现,其围捕半径变得很大,不切实际。 3)避障能力增强,灵活性提高。 单层围捕避障只是在单层围捕圆周上通过左右移动来实现,其避障能力有限,而多层围捕通过增加层数可以通过更狭小的通道,而且多层围捕还实现了单层围捕没有实现的对静态非凸障碍物和动态变形障碍物的避障,提高了灵活性。 4)更可靠的围捕。 单层围捕由于只有一层,易于出现猎物逃出围捕圆周的现象,而多层围捕由于层数较多,猎物不易轻易逃出围捕圆周。 本文研究未知非凸和凸以及动态变形障碍物环境下群机器人围捕问题,提出了一种基于简化虚拟受力模型的非完整移动群机器人协同多层围捕方法,仿真验证了其避障效果、避碰效果和多层协同围捕的有效性。稳定性分析给出了系统稳定的充分条件,且验证了基于简化虚拟受力模型可以使群机器人涌现出期望的群体协同多层围捕行为,对涌现控制研究有所帮助。最后列出了多层协同围捕方法与其他方法相比的优势。 [1] Phan T A,Russell R A.A swarm robot methodology for collaborative manipulation of non-identical objects[J].The International Journal of Robotics Research,2012,31(1):101-122. [2] 李学平,卢志刚,刘照拯,等.含分布式电源的配电网多故障抢修的多代理策略研究[J].电工技术报,2013,28(8):48-55. Li Xueping,Lu Zhigang,Liu Zhaozheng,et al.Multi-agent strategy of distribution networks multi-faults rush-repair with distributed generators[J].Transactions of China Electrotechnical Society,2013,28(8):48-55. [3] 周风余,李贻斌,冯国瑞.巡检机器人对输电线断股实时在线检测与诊断的一种方法[J].电工技术学报,2010,25(6):185-191. Zhou Fengyu,Li Yibin,Feng Guorui.A real-time online method for detecting and diagnosing broken strand of high-voltage transmission line with inspection robot[J].Transactions of China Electrotechnical Society,2010,25(6):185-191. [4] 徐玉琴,张丽,王增平,等.基于多智能体遗传算法并考虑分布式电源的配电网大面积断电供电恢复算法[J].电工技术学报,2010,25(4):135-141. Xu Yuqin,Zhang Li,Wang Zengping,et al.Algorithm of service restoration for large area blackout in distribution network with distributed generators[J].Transactions of China Electrotechnical Society,2010,25(4):135-141. [5] 王媛,焦彦军.基于多Agent技术的站域保护系统的研究[J].电力系统保护与控制,2013,41(3):80-85. Wang Yuan,Jiao Yanjun.Research on substation-area protection system based on multi-Agent system[J].Power System Protection and Control,2013,41(3):80-85. [6] 李振兴,尹项根,张哲,等.基于多Agent的广域保护系统体系研究[J].电力系统保护与控制,2012,40(4):71-75. Li Zhenxing,Yin Xianggen,Zhang Zhe,et al.Hierarchy of wide area protection system based on multi-agent[J].Power System Protection and Control,2012,40(4):71-75. [7] 胡汉梅,郑红,赵军磊,等.基于配电网自动化的多Agent技术在含分布式电源的配电网继电保护中的研究[J].电力系统保护与控制,2011,39(11):101-105. Hu Hanmei,Zheng Hong,Zhao Junlei,et al.Application of the distributed automation based multi-agent technology in the distributed protection with DG[J].Power System Protection and Control,2011,39(11):101-105. [9] Purnamadjaja A H,Russell R A.Pheromone communication in a robot swarm:necrophoric bee behaviour and its replication[J].Robotica,2005,23(6):731-742. [10]Brambilla M,Ferrante E,Birattari M,et al.Swarm robotics:a review from the swarm engineering perspective[J].Swarm Intelligence,2013,7(1):1-41. [11]Navarro I,Matía F.Review article:an introduction to swarm robotics[J].ISRN Robotics,2013,2013:1-10. [12]Xiong Junfeng,Tan Guanzheng.Virtual Forces based approach for target capture with swarm robots[C].Control and Decision Conference,Guilin,2009:642-646. [13]Blazovics L,Csorba K,Forstner B,et al.Target tracking and surrounding with swarm robots[C].IEEE 19th International Conference and Workshops on Engineering of Computer Based Systems (ECBS),Novi Sad,Serbia,2012:135-141. [14]Shi Z,Zhang X,Tu J,et al.An improved capturing algorithm based on particle swarm optimization for swarm robots system[C].IEEE International Conference on Computer Science and Automation Engineering (CSAE),Zhangjiajie,2012:556-571. [15]Schenato L,Oh S,Sastry S,et al.Swarm coordination for pursuit evasion games using sensor networks[C].Proceedings of the 2005 IEEE International Conference on Robotics and Automation,Barcelona,Spain,2005:2493-2498. [16]Pimenta L C,Pereira G A,Michael N,et al.Swarm coordination based on smoothed particle hydrodynamics technique[J].IEEE Transactions on Robotics,2013,29(2):383-399. [17]Kubo M,Sato H,Yamaguchi A,et al.Target Enclosure for Multiple Targets[M]//Intelligent Autonomous Systems 12.Berlin,Heidelberg:Springer,2013. [18]Huang Tianyun,Chen Xuebo,Xu Wangbo,et al.A self-organizing cooperative hunting by swarm robotic systems based on loose-preference rule[J].Acta Automatica Sinica,2013,39(1):57-68. [19]张红强,章兢,周少武,等.未知动态环境下非完整移动群机器人围捕[J].控制理论与应用,2014,31(9):1151-1165. Zhang Hongqiang,Zhang Jing,Zhou Shaowu,et al.Nonholonomic mobile swarm robots hunting in unknown dynamic environments[J].Control Theory & Applications,2014,31(9):1151-1165. [20]Xu Wangbao,Chen Xuebo.Artificial moment method for swarm robot formation control[J].Science in China Series F:Information Sciences,2008,51(10):1521-1531. [21]Xu Wangbo,Chen X B,Zhao Jie,et al.A decentralized method using artificial moments for multi-robot path-planning[J].International Journal of Advanced Robotic Systems,2013,10(24):1-12. Cooperative Multilayer Hunting by Swarm Robots in Unknown Dynamic Complex Environments ZhangHongqiang1,2ZhangJing1ZhouShaowu2OuyangPuren3WuLianghong2 (1.College of Electrical and Information Engineering Hunan University Changsha 410082 China 2.College of Information and Electrical Engineering Hunan University of Science and Technology Xiangtan 411201 China 3.College of Mechanical and Electrical Engineering Hunan University of Science and Technology Xiangtan 411201 China) A multilayer cooperative self-organizing hunting method,which is based on a simplified virtual-force model,is proposed for nonholonomic multilayer mobile swarm robots hunting in unknown dynamic complex environments.First,the motion models for the hunted target in unknown cluttered environments are designed.Then through researching hunting behavior under cluttered environments,a simplified virtual-force model is formed.Based on the virtual-force model,the control method is designed for swarm robots following motions of barriers and multilayer cooperative hunting the target.The method only needs the location information of the target and two nearest neighbors.So it is easy to be calculated and realized.After that,the stability of the hunting system is analyzed,and the control parameter ranges are obtained.Simulation results for different situations and comparative analyses demonstrate that the proposed method,which can make the group of robots maintain a good multilayer cooperative hunting formation in unknown complex environments,has good performance of obstacles avoidance,high scalability,and flexibility. Nonholonomic mobile robots,swarm robots,simplified virtual-force model,formation keeping,multilayer hunting 国家自然科学基金(61174140,51374107)、国家科技支撑计划项目课题(2012BAH09B02)、国家自然科学青年基金(61203309)、湖南自然科学基金(13JJ8014)、长沙市科技计划(重大专项)项目(K1306004-11-1)、湖南省教育厅优秀青年项目(12B043)和博士点基金(20110161110035)资助。 2014-12-18 改稿日期2015-04-02 TP24 张红强 男,1979年生,讲师,博士研究生,研究方向为群机器人系统、群体智能、优化与智能控制等。(通信作者) 章 兢 男,1957年生,教授,博士生导师,研究方向为智能控制理论与应用、复杂系统工业控制、节能减排管控一体化和智能系统等。









2 多层协同围捕算法



3 稳定性分析
















4 未知动态复杂环境下仿真







5 比较分析
6 结论
猜你喜欢
卫星应用(2022年7期)2022-09-05卫星应用(2022年3期)2022-05-23卫星应用(2022年1期)2022-03-09动漫界·幼教365(中班)(2020年3期)2020-04-20铁道通信信号(2020年9期)2020-02-06环球慈善(2019年6期)2019-09-25中学生数理化·八年级物理人教版(2018年5期)2018-06-21江西建材(2018年1期)2018-04-04火炸药学报(2014年3期)2014-03-20物理与工程(2014年5期)2014-02-27