
基于大视场星敏感器的目标识别技术*
2015-04-01 12:20丁国鹏郑伟波李勉洪
传感器与微系统 2015年9期
丁国鹏,张 涛,郑伟波,李勉洪
(中国科学院 上海技术物理研究所,上海200083)
0 引 言
随着人类航天活动的日益频繁,太空碎片也急剧增多,对航天器构成了很大的威胁,对其的监测也成为当今研究的热点[1]。由于天基观测不受大气环境、地理环境等条件限制,所以,它成为了太空碎片的一种主要监测手段。星敏感器是一种以恒星为参考系,以星空为工作对象的高精度空间姿态测量装置,通过探测天球上不同位置的恒星进行星图匹配后姿态解算,为卫星、宇宙飞船等航天器提供准确的姿态信息[2]。
目标识别中的主要困难在于提取稳健的、能分离的目标特征[3]。但无论是太空碎片还是恒星都距离探测器非常远,可以认为是平行光入射,在像平面上都是呈现一个不具有几何特征的斑点。因此,对太空碎片的天基监测和对恒星的姿态测量具有一定的共同性,可以考虑将二者功能进行复合复用,达到一物多用的效果,可减少卫星载荷的体积、重量和功耗。
1 大视场星敏感器工作原理
1.1 大视场星敏感器设计原理
大视场星敏感器的设计原理如图1 所示,因为太空碎片在空间的分布具有随机性,为了提高捕获目标的几率,则需要将光学系统设计成超大视场。而视场增大后,因视场内能观测到更多的恒星,有足够的亮星做星敏姿态测量的导航星,则可将导航星库中的暗星剔除以减少星图匹配时间,同时降低了光学系统对恒星光束能量的需求,对星等的灵敏度需求可以由普通星敏感器的6~7 等暗星变为3 等星左右的亮星。这样便可以大大减小光学系统的口径以达到将光学载荷体积、重量减小的目的[4]。

图1 探测系统设计原理Fig 1 Design principle of detection system
1.2 基本坐标系与姿态矩阵
目标探测和星敏姿态测量涉及到2 个基本的坐标系:天球坐标系和星敏感器测量坐标系[4]。
赤经坐标系是一种惯性坐标系。如图2 所示,赤经坐标系是以天赤道为横坐标圈、以过春分点的时圈为纵坐标圈,以春分点为原点,它的2 个坐标量为赤经和赤纬。
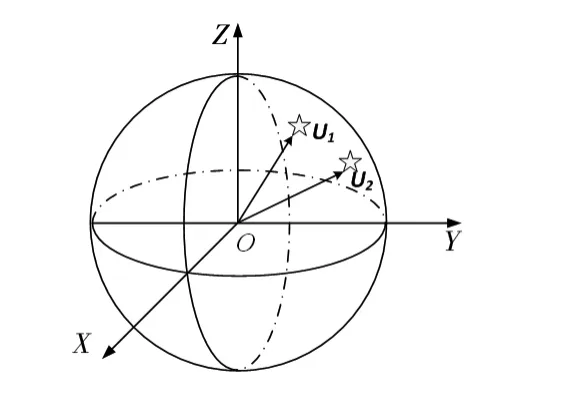
图2 赤经坐标系Fig 2 Right ascension coordinate system
星敏感器测量坐标系是基于成像原理的坐标系。如图3所示,x'O'y'坐标系是像平面直角坐标系,Oxyz 坐标系是像空间坐标系,OO'距离为星敏相机的焦距f。
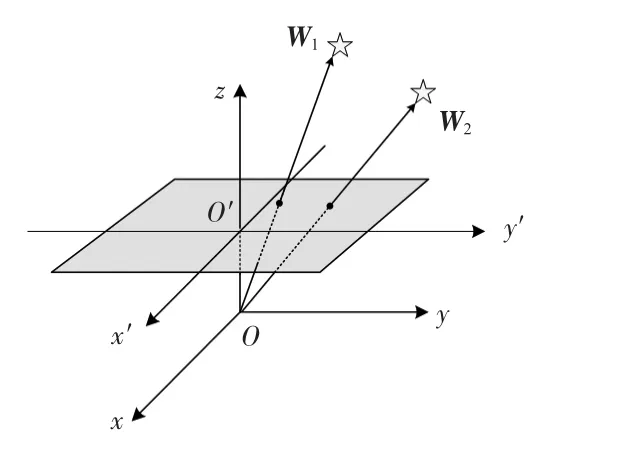
图3 星敏感器测量坐标系Fig 3 Star tracker measurement coordinate system
假设有两颗互不平行的恒星在这2 个坐标系中,设赤经坐标系中两观测星的单位矢量为U1,U2,其在星敏感器测量坐标系下的单位矢量为W1,W2。由星敏感器工作时的星图匹配算法可以将其一一对应,分别在天球坐标系、星敏感器测量坐标系中建立新的正交坐标系c,s,其坐标系中各坐标轴的单位矢量为

则存在唯一的正交姿态矩阵C,满足[5]

该姿态矩阵将参与到星敏感器的姿态解算过程。同时若某恒星在赤经坐标系的单位矢量为UT,其在星敏感器测量坐标系下的矢量为WT,则有

由式(3)可知,当星敏感器的姿态矩阵得出后,任何在星敏感器视场内的点目标都可依据姿态矩阵计算得出其在赤经坐标系下的矢量信息。
2 虚假目标及其运动特性分析
若将大视场星敏感器应用于天基太空碎片的检测,基于安全防护的考虑,探测系统至少应该能探测10 km 以外的太空碎片。因距离较远,太空碎片的成像效果和恒星类似,都是呈现一个小圆斑,不具有几何特征供探测系统提取。对于太空碎片探测系统来说,有以下几类虚假目标会干扰到真实目标的确定:
1)星敏感器导航星库内的恒星。
2)导航星库外的恒星:包括一些星等较高的暗星、不能用作导航星的变星、双星。
3)太阳系内的行星。
这三类虚假目标距离探测系统都较远,其中恒星位置可以认为在赤经坐标系中数年无变化,而行星位置可认为其在数个轨道周期内无变化。
但这些目标在星敏感器坐标系下和在像平面坐标系下变化规律则较为复杂。假设飞行器运行方向为绕y 轴运动,如图4 所示,并且有两颗星恰好在像平面右边缘的中间位置A 和上方位置B,则运动一段时间后,在像平面上,A位置的恒星像点移动到中心位置O,但A 位置的恒星像点却并不是移动到中上的C 点,而是移动到T 点。这是因为恒星离观测系统无穷远,为平行光入射,星对角是不会发生变化的,成像系统满足正切的映射关系,使得若中心半视场角∠CO'O 即α=35°,则边缘半视场张角∠BO'A 即β=30°。所以,恒星的像点在探测器像面上的运动轨迹如图4右边所示为曲线运动。
若飞行器的运动方向并非绕单个轴转动,那么,星像点的运动轨迹则更为复杂。所以,若使用常用的轨迹编目技术,因真实目标和虚假目标在像平面上的运动轨迹都很复杂,不是直线,很难通过目标的航迹来确定真实目标[6]。
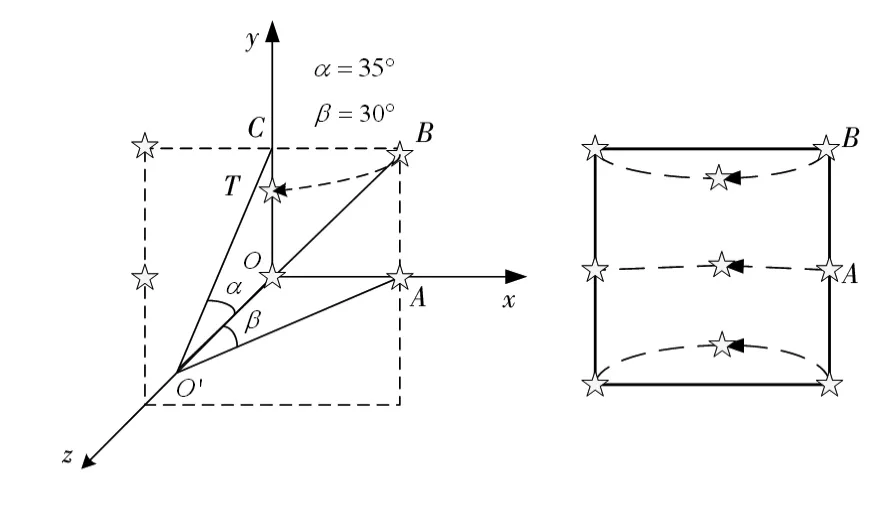
图4 恒星在像平面坐标系下的运动轨迹Fig 4 Trajectory of stars in image planar coordinate system
3 基于姿态矩阵的目标判定算法
由上述分析可以得知,真实目标和虚假目标在像平面下的运动都很复杂,且是难以区别,但虚假目标在赤经坐标系下的运动情况具有一定的特殊性,即其在短时间内都可认为是静止不动的,而真实目标却仍然会有相对运动。若依据姿态矩阵,将所有疑似目标矢量都转换到赤经坐标系下。多帧进行分析便可成功将真实目标提取。算法流程如图5 所示。
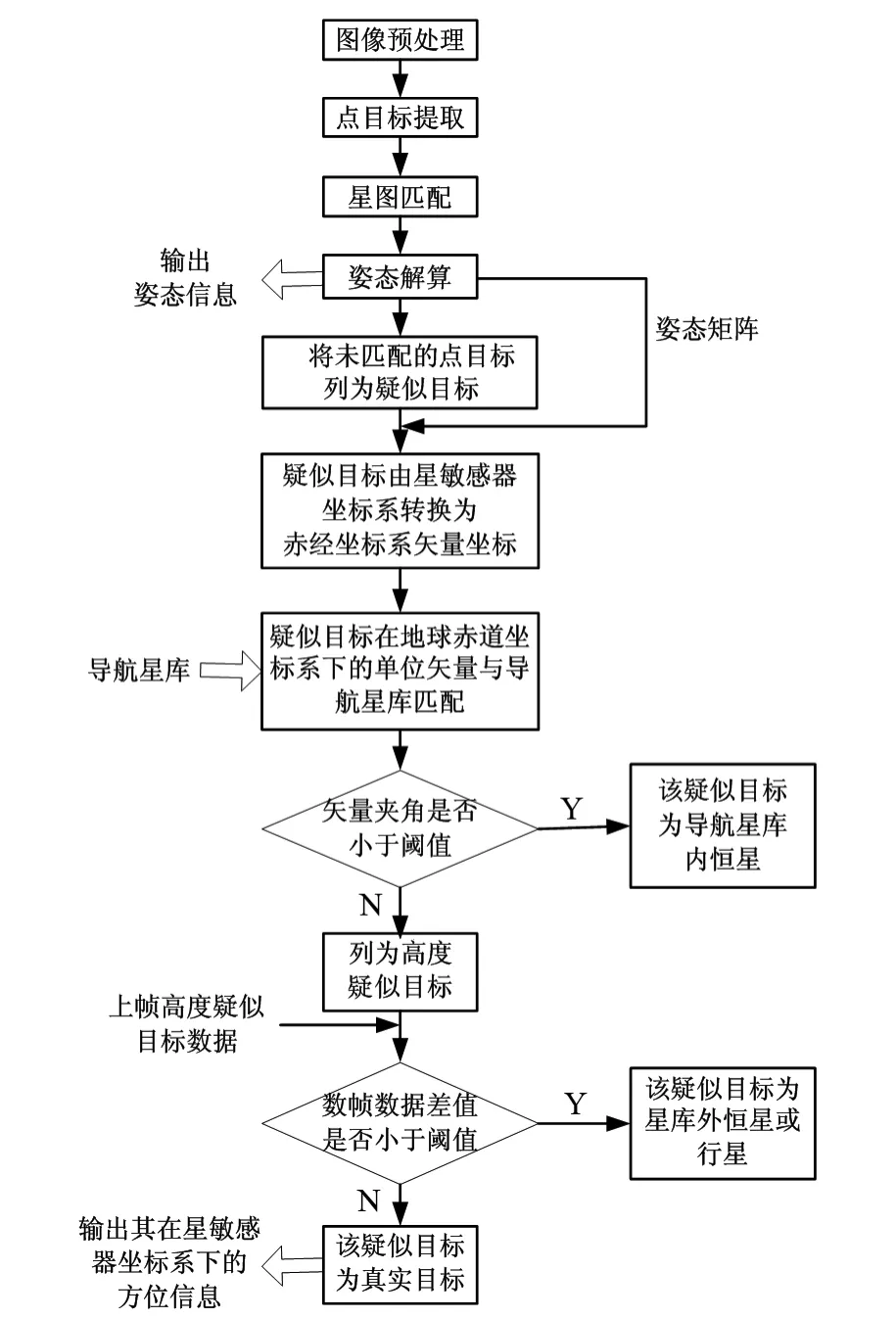
图5 基于姿态矩阵的目标判定算法流程图Fig 5 Algorithm flow chart of target determination based on attitude matrix
探测系统在获取图像后,首先进行图像预处理,选用合适的滤波算法消除噪声,提高信噪比。然后提取图像中的斑点目标进行质心定位。依据星图匹配算法成功匹配导航星后可计算得到姿态矩阵,将星图匹配中为匹配的点目标列为初步疑似目标,基于姿态矩阵由式(3)可以得到其在赤经坐标系下的矢量信息,结合导航星库内的恒星进行一一比对,若两单位矢量的夹角小于一定阈值,则可认为两者是同一颗恒星,便可将此恒星从疑似目标列表中剔除,剩下的目标可列为高度疑似目标,需要至少2 帧以上数据才能判定其是否真实目标。结合前几帧高度疑似目标在赤经坐标系下的矢量信息,若某目标的变化超过设定的阈值,则可认为其运动规律与虚假目标迥异,可判定其为真实目标。
4 仿真验证
由STK(satellite tool kit)软件可以建立相应的轨道模型。探测卫星与模拟太空碎片的轨道参数如表1 所示。

表1 探测卫星与太空碎片的轨道参数Tab 1 Orbital elements of detection satellite and space debris
其中,a 为长半轴,km;e 为偏心率;i 为轨道倾角,(°);w 为近地点幅角,(°);Ω 为升交点赤经,(°);f 为真近点角,(°)。
由探测系统的视轴指向与卫星的三维坐标以及太空碎片的三维坐标,结合星库,可生成星空背景下的目标图像数据。依据实验室测试结果,实验使用的大视场星敏感器单星定位精度为30″,为了使仿真结果与真实情况相仿,加入30″的定位随机误差。取12 min 的轨道数据绘制轨迹如图6所示,图中包含一颗导航星库外的3 等星和太空碎片。其中,星库外的3 等星作为虚假目标,太空碎片为真实目标。由图可以看出:在运动轨迹上,太空碎片在该轨道参数下运动轨迹与普通恒星近似。从12 min 的轨迹分析可以看出:其运动方向略微有些差异,相对运动速率也有些不同,但差异过小,不便于阈值的设定,需要长时间的跟踪才能够准确地判定出真实目标。

图6 恒星与太空碎片轨迹Fig 6 Trajectory of stars and space debris
将所有点目标基于姿态矩阵换算至赤经坐标系下,则无论是导航星内的恒星还是星库外的恒星都是静止不动的。而真实目标却依然在运动,其运动速率与两者之间的相对运动角速率和轨道参数相关。将阈值设定为90″时,算法运行结果如表2 所示。
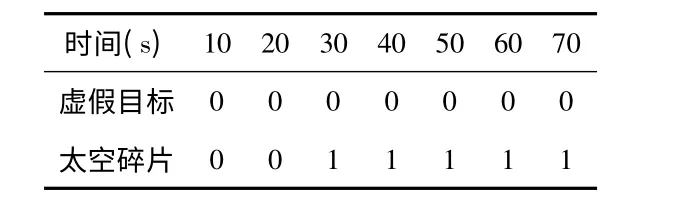
表2 仿真实验结果Tab 2 Results of simulation experiment
表2 中结果为0 表示不是真实目标,结果为1 表示成功判定出太空碎片。结果显示:虽然虚假目标在获取的图片中轨迹与碎片近似,但经过姿态矩阵的转换,在赤经坐标系下,其矢量位置不变,即静止不动。所以,输出结果一直为0,即算法未将其认定为真实目标。但真实目标矢量转换后仍然会有变化,在30 s 后能够被成功识别。需要指出的是,真实目标与探测器的距离一般不会超过卫星的地心距,转换后的结果并不是其在赤经坐标系下的真实运动结果,而是一种相对运动的运算结果,所以,其运动的角速率不能等同于其在赤经坐标下真实的运动角速率。
算法运行过程可以发现,目标最终判定所需的时间和阈值的大小呈正比,如图7 所示。

图7 识别时间和阈值的关系Fig 7 Relationship between recognition time and threshold value
为了缩短识别所需要的时间,阈值越小越好,但阈值过低可能会导致虚警事件的发生。可将阈值设定为系统对目标定位的3 倍均方差,可大大降低虚警率。
5 结 论
本文提出了一种天基目标识别的新方法,即采用大视场星敏感器复合目标识别功能,依据星敏感器姿态计算过程中得到的姿态矩阵,将疑似目标的矢量信息转换成赤经坐标系下的矢量信息,由于虚假目标在赤经坐标系下静止不动,故而能简单有效地将虚假目标剔除,成功判定真实目标。整个算法过程运算量小,便于向硬件系统移植。
[1] 唐 超,唐庆博,王跃阳.基于光学的空间非合作目标探测方法分析[C]∥中国宇航学会深空探测技术专业委员会第九届学术年会论文集,中国宇航学会深空探测技术专业委员会、飞行器动力学与控制教育部重点实验室,2012:6.
[2] Paulsen T E,Maresi L.Calibration and verification of the TERMA star tracker for the NEMO satellite[C]∥AIAA Space 2000 Conference and Exposition,2000:1-8.
[3] 郭文艳,韩崇昭.基于灰度关联的多传感器融合目标识别方法[J].传感器与微系统,2007,26(9):115-116,120.
[4] 张广军.星图识别[M].北京:国防工业出版社,2011:6-7.
[5] 刘朝山.弹载星敏感器原理及系统应用[M].北京:国防工业出版社,2010:194-195.
[6] 赵海彬,宋志杰,马庆龙.一种多目标航迹处理的方法[J].火力与指挥控制,2004(1):29-31.
猜你喜欢
现代电子技术(2022年18期)2022-09-17
北京航空航天大学学报(2021年9期)2021-11-02
科学技术创新(2021年25期)2021-09-11
中学生数理化·高一版(2021年11期)2021-09-05
小哥白尼(神奇星球)(2021年11期)2021-03-08
小聪仔(科普版)(2020年12期)2021-01-18
中国医疗设备(2019年1期)2019-01-15
百科探秘·航空航天(2018年12期)2018-12-29
奥秘(2018年10期)2018-10-25
现代防御技术(2016年1期)2016-06-01
