红外运动模糊图像参数估计方法*
2015-01-12 09:04:55白响恩
传感器与微系统 2015年9期
白响恩, 易 佳
(上海海事大学,上海 201306)
红外运动模糊图像参数估计方法*
白响恩, 易 佳
(上海海事大学,上海 201306)
在船舶上拍摄红外传感图像的过程中由于船舶的摇晃而导致的运动模糊,会降低图像的质量。根据运动模糊图像的特性,分析了运动模糊图像的退化模型与特性。首先对倒频谱进行了二值化,并运用Radon变换确定了点扩散函数的模糊角度,然后使用模糊尺度迭代与维纳滤波得到复原图像,再对其进行边缘检测,通过计算累计边缘数确定了模糊尺度。最后对不同模糊程度的图像计算参数并复原,实验结果表明了算法的有效性。
运动模糊; 点扩散函数; 倒频谱; Radon变换; 边缘检测
0 引 言
在获取图像的过程中,当被拍摄的物体和相机存在相对运动时会造成图像模糊,这是一种很常见的退化现象。对运动模糊图像复原技术的研究是图像复原领域比较热点的研究课题。船舶在夜间或在恶劣天气下航行时,用可见光成像观察障碍物(如冰山)的方式几乎失效。而红外成像克服了可见光成像缺点,红外探测仪可测量目标本身与背景间的温差,得到不同的热红外线形成的红外图像。但船舶航行时存在摇晃,红外相机成像时会产生运动模糊,进而影响图像的后续处理。相机曝光瞬间船舶的摇晃造成的速度和方向上的变化可近似地认为是恒定的,那么可以等效为匀速直线运动所造成的成像模糊。
模糊图像复原的关键在于点扩散函数(PSF)[2]的准确估计,而点扩散函数由模糊方向和模糊尺度两个参数确定。
本文首先对红外图像的倒频谱二值化,然后使用Radon变换确定了运动模糊方向角,对尺度迭代的维纳滤波复原图像进行边缘检测,通过计算累计边缘数确定了模糊尺度。最后通过对仿真生成模糊图像和实拍模糊图像的PSF参数鉴别及其复原实验,证明了算法的有效性。
1 图像退化模型与DSF
1.1 图像退化模型
图像退化的模型[3]如图1所示。

图1 图像退化模型
f(x,y)为原始图像,g(x,y)为退化图像,H为系统参数亦即PSF,h(x,y),n(x,y)为加性噪声。它们之间的关系在空间域可用如下数学表达式表示
g(x,y)=H[f(x,y)]+n(x,y) =f(x,y)*h(x,y)+n(x,y),
(1)
式中 *为卷积运算。
图像复原实际上可以看成是一个预测估计的过程[4],由已经给出的g(x,y)估计出系统参数H,从而近似地恢复出f(x,y)。
1.2 匀速直线运动模糊PSF
当被拍摄物体与相机之间的相对运动方向沿水平直线时,运动模糊的PSF的离散化数学表达式为

(2)
式中L为图像上物体移动的像素个数的整数近似值。
若相对运动方向为如图2所示的任意方向像移,那么假设像移在图像的x方向和y方向上的像移分别为m和n,则m=Lcosθ,n=Lsinθ。
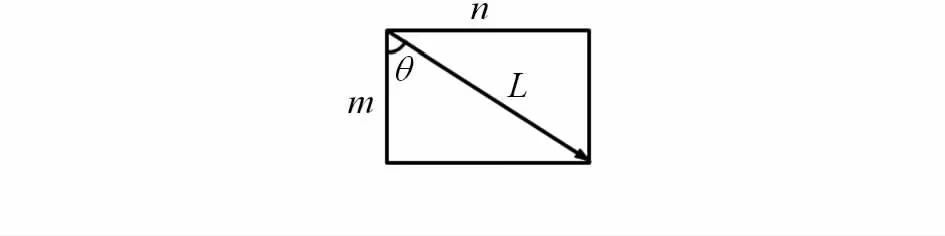
图2 任意方向像移
当m≥n时,运动模糊的PSF的数学表达式[5]为
(3)
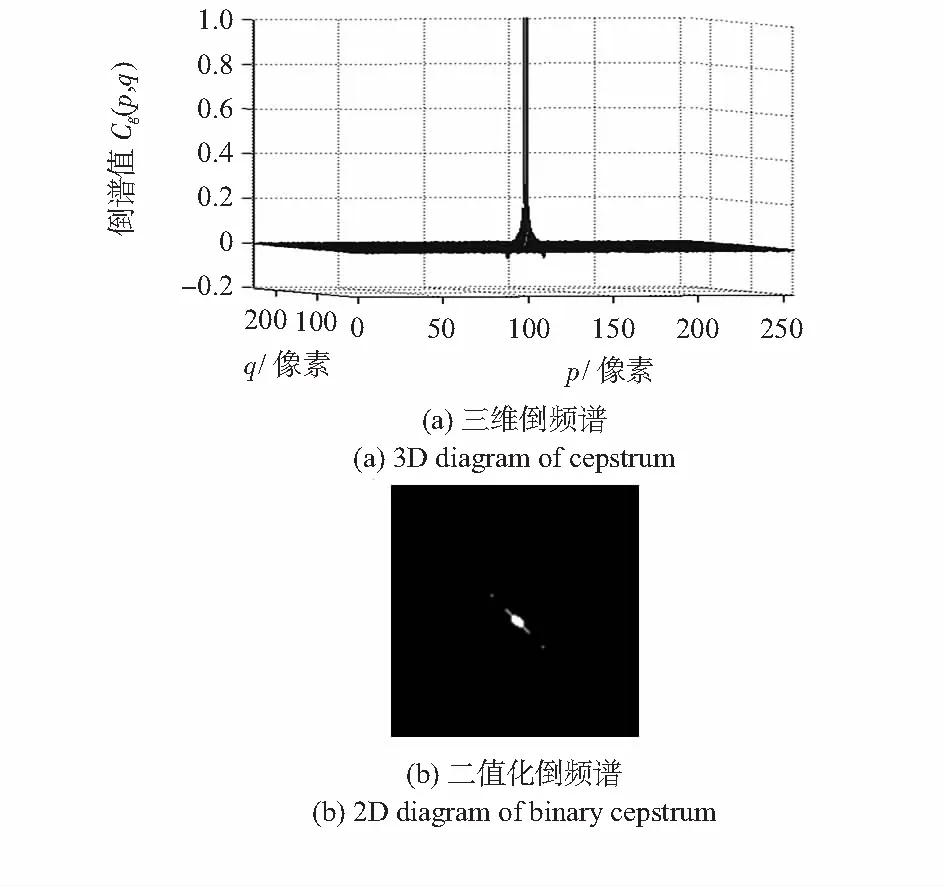
当m (4) 式中 [ ]为取整符号。 2.1 倒频谱 图像g(x,y)的倒频谱定义为 Cg(p,q)=F-1{lg|G(u,v)|}, (5) 式中G(x,y)为g(x,y)的傅里叶变换,F-1表示傅里叶逆变换。 如果忽略噪声,式(1)中的卷积会在倒频谱中变成加法 Cg(p,q)=Cf(p,q)+Ch(p,q). (6) 图3(b)为红外相机对拍摄的清晰人物图像图3(a)作了仿真运动模糊处理,模糊角度θ=45°,模糊尺度L=20。 其倒频谱的三维图如图4(a)所示,它由两部分组成:高幅值成分反映了原始图像的特性,低幅值成分反映了模糊系统的特性。为了突出倒频谱的特征,图4(b)对图4(a)进行了二值化,可以看到图像中心出现了一条亮带,并且亮带的方向与模糊方向一致。 图3 模糊仿真图像 图4 倒频谱三维与二维图 2.2 模糊方向估计 对图像作Radon变换,实际上就是将图像矩阵在某一个指定的角度射线方向上做投影变换。Radon变换的定义有很多种形式,其中一种定义[6]的形式如下 y′cosθ)dy′, (7) 式中 x′与x,y′与y的对应关系为 上式表示了函数f(x,y)在空间(x′,θ)上的投影。 对图像的二值化倒频谱做Radon变换确定模糊方向的具体步骤如下: 1)对模糊图像g(x,y)作傅里叶变换并取对数得到lg|G(u,v)+1|[7],对其进行傅里叶逆变换得到Cg(p,q)。 2)将Cg(p,q)二值化得到B(p,q)。 3)对B(p,q)做1°~180°的Radon变换[8],会得到一个矩阵R。 4)模糊角度θ=arg max(max(R))。 对图3(b)进行各角度Radon变换求最大值的曲线如图5所示,曲线中的最大值对应的角度θ=45°。 图5 各角度Radon变换所对应最大值曲线 2.3 模糊尺度估计 倒频谱两个负峰之间的距离是模糊尺度的2倍,但是负峰值点很容易被其他的信息淹没[9],导致距离没有办法被提取出来。因此,本文采用了一种使用维纳滤波迭代的方式来确定模糊尺度。假设模糊角度估计的是正确的,当模糊尺度越接近于真实尺度时,复原出的图像就会越清晰;反之,复原图像上会出现很强的振铃现象。对复原图像进行边缘检测之后,这些振铃就能很明显地被观察到。所以,边缘信息最少时对应的模糊尺度即为要求的值。确定模糊尺度的具体步骤如下: 1)将模糊尺度从L=3开始依次加1迭代,并设置上限Lmax; 4)模糊尺度L=arg min(sum(Bn)),n=3,4,…,Lmax。 对图3(b)进行模糊长度迭代复原之后,使用以上算法的结果如图6所示,累计边缘数曲线中最小值对应的尺度L=20。 实验中选用了红外相机拍摄的清晰人物图像,大小为256像素×256像素。使用了表1中的模糊角度和模糊尺度模拟运动模糊图像然后对其进行参数的计算,实验结果如表1所示。 表1 实验结果 Tab 1 Results of experiments 模糊角度(°)不同模糊尺度(像素)的计算结果((°)/像素)1520253000/150/200/250/301515/1516/2016/2516/313032/1530/2030/2531/304545/1545/2045/2545/316060/1459/2159/2560/307575/1675/1976/2774/319090/1590/2090/2590/30105105/15105/20105/25106/29120118/16120/20120/25120/30135135/15135/20134/25134/31150152/15150/20149/25151/30165163/15165/20166/25164/30 上文估计参数的算法的模糊角度的绝对误差在2°,模糊尺度的绝对误差在2之内。图7(a)为仿真模糊图像,图7(b)为参数估计后复原的结果,图7(c),(e)均为实际拍摄的模糊图,图7 (d),(f)分别为它们的复原结果。 图7 模糊图像复原结果 运动模糊图像PSF的参数确定是该类图像复原中的重要步骤。本文对模糊图像进行了分析,对二值化倒频谱运用Radon变换来确定模糊角度,对尺度迭代的维纳滤波复原图像进行边缘检测之后确定了模糊尺度,实验结果表明此算法是有效的。 本文算法对仿真图像的复原效果很好,但在实际拍摄的图像中,即使估计的参数很接近真实情况仍会产生比较明显的振铃现象。在今后的工作中应该考虑如何去除振铃现象,进一步提高复原图像的质量。 [1] 李 仕.航空异速像移实时恢复算法研究与GPU平台实现[D].长春:中国科学院长春光学精密机械与物理研究所,2010. [2] 王晓红,赵荣椿.匀速直线运动模糊的PSF之估计[J].计算机应用,2001,21(9):40-41. [3] 冈萨雷斯·伍兹.数字图像处理[M].3版.北京:电子工业出版社,2011:197. [4] 谢凤英,赵丹培.Visual C++数字图像处理[M].北京:电子工业出社,2008:340-341. [5] 王晓红,赵荣椿.任意方向运动模糊的消除[J].中国图象图形学报,2000,5(6):525-529. [6] 孙兆林.Matlab6.x图像处理[M].北京:清华大学出版社,2002. [7] 郭永彩,郭瑞瑞,高 潮.运动模糊图像点扩展函数的参数鉴别[J].仪器仪表学报,2010,31(5):1052-1057. [8] 乐 翔,程 建,李 民.一种改进的基于Radon变换的运动模糊图像参数估计方法[J].红外与激光工程,2011,40(5):963-969. [9] 郭红伟,付 波,田益民.实拍运动模糊图像的退化参数估计与复原[J].激光与红外,2013,43(5):559-564. Parameter estimation method for infrared motion-blur images* BAI Xiang-en, YI Jia (Shanghai Maritime University,Shanghai 201306,China) Infrared image photographed in the ship with swaying always gets motion-blur,which reduces the quality of the image.Analyze the degradation model of motion-blur image and its properties.Firstly,the cepstrum of degraded image is calculated and transformed to a binary image.Thus Radon transform of the binary cepstrum is used to identify the motion direction of PSF.Secondly,the image is restored by Wiener filtering with iterative blur length.Then edge detection is used to these images and blur length is determined by the cumulative edge count.The result of experiment which covers artificially images and real images shows the proposed algorithm is correct. motion-blur; point spread function(PSF); cepstrum; Radon transform; edge detection 2015—01—12 国家自然科学基金资助项目(61171126);上海重点支撑项目(12250501500);上海海事大学研究生创新基金资助项目(YC2012066);上海海事大学校基金资助项目(20130480) 10.13873/J.1000—9787(2015)09—0027—03 TP 317.4 A 1000—9787(2015)09—0027—03 白响恩(1984-),女,上海人,博士研究生,讲师,研究方向为通航安全管理、海上交通风险评估。2 PSF的参数估计


3 实验结果


4 结束语
猜你喜欢
疯狂英语·新悦读(2022年8期)2022-09-20 01:32:12
空间科学学报(2021年6期)2021-03-09 06:20:14
陶瓷学报(2020年6期)2021-01-26 00:38:22
紫禁城(2020年8期)2020-09-09 09:38:04
石家庄铁路职业技术学院学报(2019年3期)2019-10-30 03:26:32
测控技术(2018年7期)2018-12-09 08:58:22
无线电通信技术(2015年3期)2015-12-23 11:37:00
航天返回与遥感(2014年4期)2014-07-31 17:47:47
长江大学学报(自科版)(2014年7期)2014-03-20 13:21:02
电子设计工程(2014年19期)2014-02-27 12:00:41