
基于数字样机技术的链传动运动学分析
2015-03-24 08:02尚歌
制造业自动化 2015年5期
尚 歌
SHANG Ge
(吉林建筑大学,长春 130118)
0 引言
链传动是机电产品中常用的一种传动形式,它品种繁多,应用广泛。但由于链传动的独有运动特性-多边形效应的存在,致使链传动运动时不能保持恒定瞬时传动比,使链条与链轮容易产生冲击、振动和噪声[1]。不但使传动速度下降,磨损严重,还对链条具有破坏作用,使链传动在有运动平稳性要求和转速较高的场合的使用受到了限制[2]。因此,对链传动运行学的研究具有非常重要的意义。
数字样机可以代替实物样机实现对机械系统的运动学分析,并且已在多种复杂机械系统中得到广泛的应用,这也为研究链传动的运动学特性提供了有效的研究手段。为此,本文基于数字样机技术,建立了链传动的运动仿真模型,采用仿真模拟,对链传动的运动学特性进行了分析与研究。
1 链传动的运动学特性
在仿真之前,先对其运动特性进行数学分析,明确链速、传动比等各参变量之间的关系,找出多边形效应的影响因素,从而为在数字样机中作进一步分析打下基础。
由于链传动存在多边形效应,即使主动轮以等角速度转动,传动链条的线速度和从动轮的角速度也是变化着的,同时这种变化是周期性的[3]。
1.1 链条的速度变化
现通过主动链轮上啮入链节铰链的运动来分析链速的变化。为便于分析,设链轮在工作时,主动边始终处于水平位置。图1所示为链传动的速度分析图。
当链节进入啮合时,铰链A随链轮作圆周运动,其圆周速度vA为:

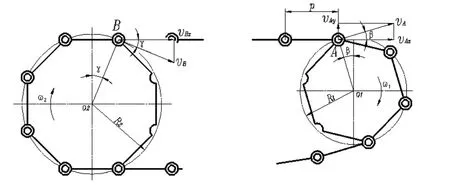
图1 链传动的速度分析图
其中,R1为主动链轮的分度圆半径;
ω1为主动链轮的角速度。
沿链条前进方向的分速度(链条速度)vAx和垂直链条前进方向的分速度vAy为:

β为啮入过程中链节铰链在主动轮上的相位角,其变化范围是-180°/z1~180°/z1,z1为主动链轮齿数。

由上文可知,即使主动链轮作等速转动,链条速度也将随相位角的变化作周期性变化。
1.2 从动链轮的角速度变化

其中,R2为从动链轮的分度圆半径;
ω2为从动链轮的角速度。
γ为链节铰链在从动轮上的相位角,其变化范围是-180°/z2~180°/z2,z2为从动链轮齿数。
当 0=β ,γ=± (180°/z2) 时,
由此可知,从动轮角速度仍呈周期性变化。
1.3 瞬时传动比
由式(4)导出,瞬时传动比is为:

链传动的瞬时传动比is也在不断变化。

只有在z1=z2,且中心距a为节距p整数倍时,瞬时传动比才保持恒定值is=1。但此时链速的不均匀性并没有消除。
综合上述的分析,链条运动的不均匀性与链轮的大小,及β角和γ角的变化范围有关,也就是与链条节距和链轮齿数有关。因此,在下面的仿真中,将针对链传动速度变化、链条节距和链轮齿数对链速的影响进行研究。
2 链传动的运动仿真
因为滚子链使用最广,所以本文将以滚子链为研究对象,通过Catia DMU(数字样机)的运动机构模块实现其动作,然后对其运动特性进行分析。运动仿真流程图如图2所示。
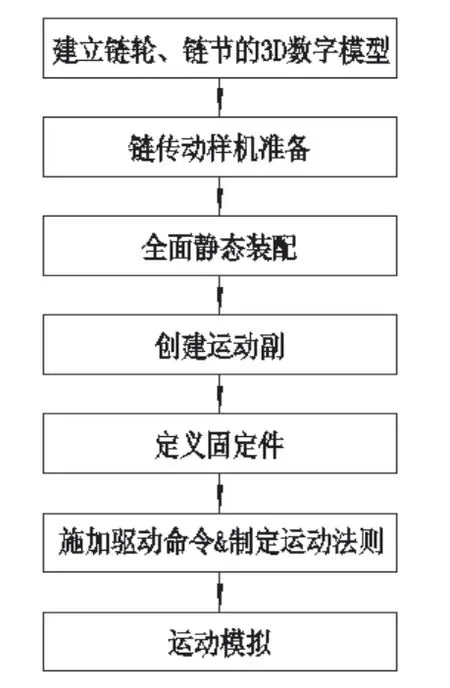
图2 运动仿真流程图
链传动装配及仿真模型如图3所示。
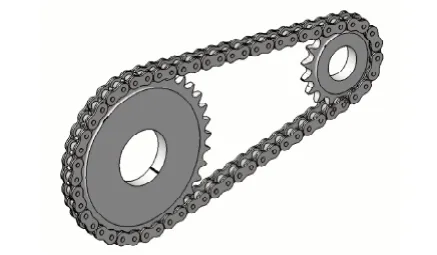
图3 链传动装配及仿真模型
下面对仿真结果进行分析。
3 链传动的运动仿真结果分析
基于链传动的运动仿真结果分析,找出其运动变化规律。链传动仿真模型的主要参数如表1所示。

表1 链传动仿真模型的主要参数
为了便于分析,设置主动轮每秒转过一个齿间角,则主动轮转速为ω1=360/z1=360/17=21.18deg/s,模拟得到链条速度曲线如图4所示。
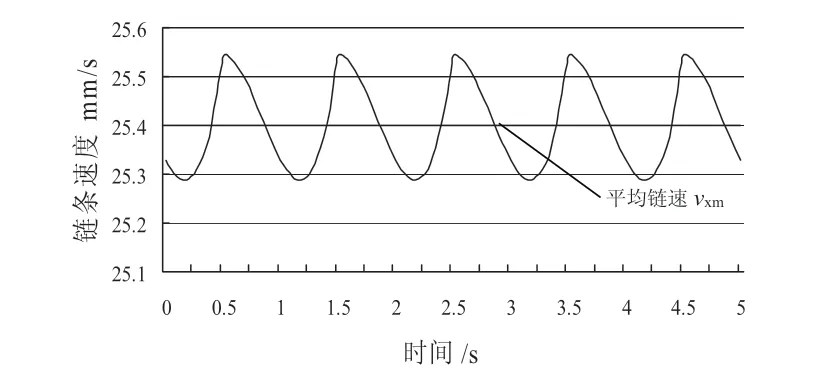
图4 链条速度曲线
由图4可知,在链传动的过程中,链条速度不断变化,最大速度vxmax=25.543mm/s,最小速度vxmin=25.288 mm/s;同时具有周期性,周期T=1s。经过计算链条的平均速度vxm= 25.3996mm/s。
图5所示为从动链轮角速度曲线。由图可知,从动链轮的转动具有不均匀性,随时间作周期性变化。最大角速度ω2max=10.3506deg/s,最小角速度ω2min=10.2424 deg/s,周期T=1s,平均角速度ω2m=10.2853deg/s。
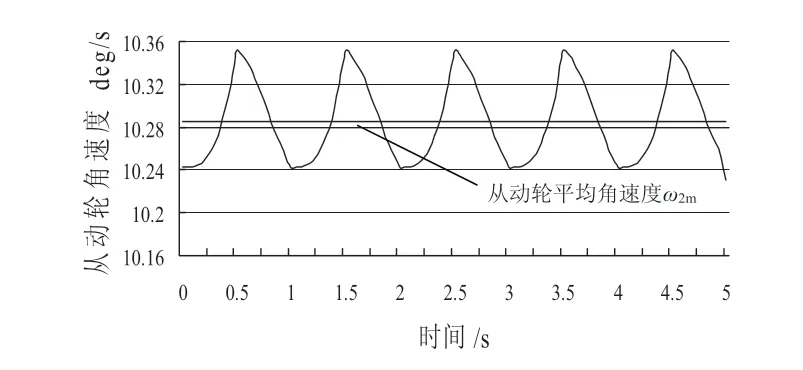
图5 从动链轮角速度曲线
图6 所示为瞬时传动比is变化曲线。由图可知,主动链轮虽等速转动,但瞬时传动比并非恒定,而是随时间不断作周期性变化。与平均传动比i=ω1/ω2= z2/z1=35/17=2.0588相比,当从动链轮角速度最大时,瞬时传动比最小;当从动链轮角速度最小时,瞬时传动比最大。最大瞬时传动比ismax=2.0675,最小瞬时传动比ismin= 2.0459,变化周期T=1s。
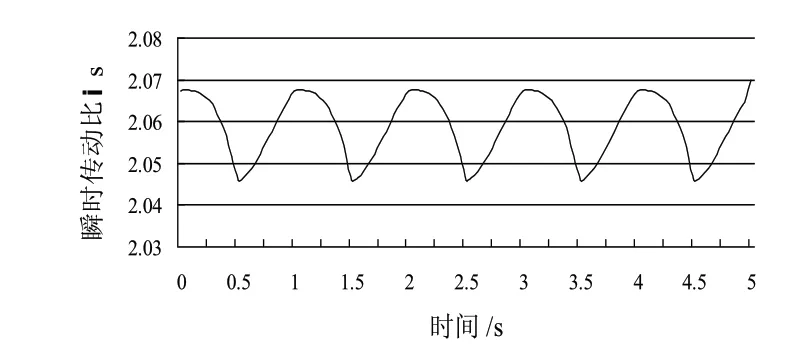
图6 瞬时传动比is变化曲线
4 链速的影响因素分析
4.1 链轮齿数对链速的影响
在节距和转速一定的情况下,分析链轮齿数对链速的影响。节距p=25.40mm,主动轮转速为ω1=50deg/s,分别采用如下齿数的链轮:1)z1=5;2)z1=7;3)z1=11;4)z1=17;5)z1=21;6)z1=27; z1=31。
齿数不同,引起的链速变化幅度也不同。现引入链速的不均匀系数δ来计量链速的变化,δ等于:

根据模拟结果,得到链速的不均匀系数曲线如图7所示。各齿数对应的不均匀系数数值如表2所示。
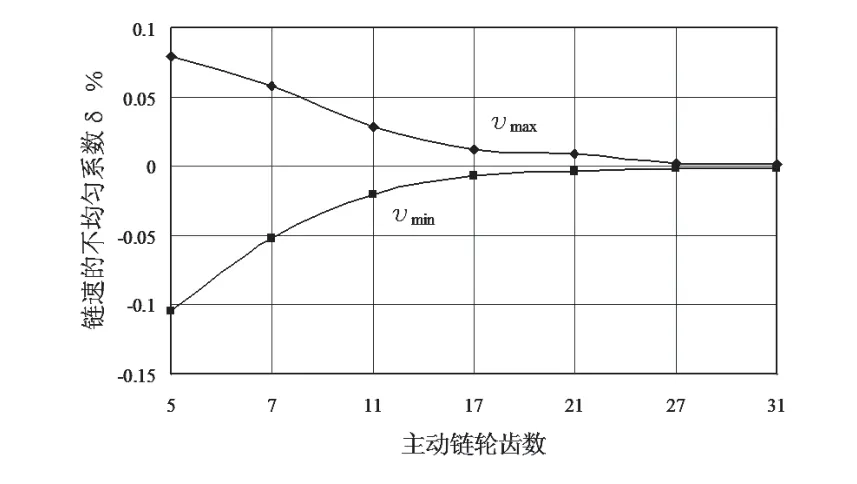
图7 链速的不均匀系数曲线

表2 链速的不均匀系数数据表
由图7可知,随着齿数的增加,不均匀系数在变小,即链速的变化幅度在减小。z1≤17时,曲线陡峭,齿数变化对链速的不均匀性影响明显;z1>17时,曲线趋于平缓,齿数变化对链速的不均匀性影响不明显。
由表2可知,当齿数z1=5或7时,齿数少,链速变化幅度大,δmax和δmin均大于5%,链速非常不均匀,难以完成正常的传动;当齿数z1=11或17时,链速的变化幅度明显变小,但δmax或δmin大于1%,链速不均匀性仍较大;当齿数z1=21,27或31时,链速的变化幅度继续变小,δmax和δmin均小于1%,不均匀性很小,能够满足大多数传动要求。
4.2 链条节距对链速的影响
链轮齿数和转速相同,分析节距对链速有影响。节距分别等于12.70mm,25.4mm,50.8mm,76.20mm,模拟得到的链条速度变化幅度曲线如图8所示。
从图8可以看出,节距不同,链速变化幅度就不同。这说明链速的变化大小与节距的大小有关,节距越小,链速变化越小,反之,节距越大,链速变化越大。同时,节距越大,链条向齿顶移动的距离越大。因此,节距越小,链速的不均匀性越小,链传动的平稳性就越好。
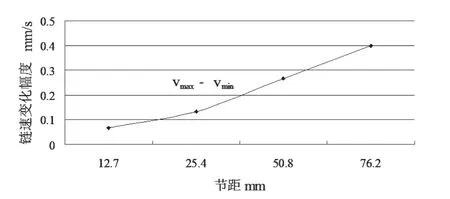
图8 链条速度变化幅度曲线
5 结论
分析可知,在链传动的过程中,链速、从动链轮角速度、瞬时传动比均随时间作周期性变化。链条速度受链轮齿数和链条节距的影响。齿数增加,链速不均匀性变小。节距越小,链速的不均匀性越小,链传动的平稳性就越好。
通过数字样机的仿真模拟,可以得到链传动的各种运动变化曲线,也可以通过查询模拟记录列表,准确地找出某一时刻各项参数的具体数值。
与以往只是对链传动的运动过程进行定性的理论计算分析相比,其仿真模拟分析更为直观和详细。该数字样机可以代替链传动机构的物理样机,为设计和研究降低了成本和提高了效率。同时也为链传动的优化设计及改善其运动学性能提供了一种可行的方法和手段。
[1] 荣长发.链传动的振动和噪声研究现状与发展[J].机械传动 2004,28(2):63-65.
[2] 杨刚.滚子链传动系统动力学特性分析[J].工程力学,1996,13(3):22-26.
[3] 张经源. 链条传动及制造[M].杭州:浙江大学出版社,1989.
猜你喜欢
轮胎工业(2022年4期)2022-07-20
质量与标准化(2022年1期)2022-03-04
轻工机械(2021年5期)2021-10-22
轮胎工业(2021年1期)2021-07-19
舰船科学技术(2021年5期)2021-07-03
小学生学习指导(高年级)(2021年3期)2021-04-06
汽车零部件(2020年7期)2020-08-03
中国金属通报(2020年23期)2020-03-15
汽车实用技术(2019年9期)2019-05-15
汽车实用技术(2018年15期)2018-08-29
