
重轨视觉检测系统的摄像机成像角度优化
2015-03-24 08:02黄前德孔建益刘源泂王兴东
制造业自动化 2015年5期
黄前德,孔建益,刘源泂,刘 钊,王兴东
HUANG Qian-de, KONG Jian-yi, LIU Yuan-jiong, LIU Zhao, WANG Xing-dong
(武汉科技大学 冶金装备及其控制教育部重点实验室,武汉 430081)
0 引言
重轨在我国高速铁路的快速发展中扮演着不可或缺的角色,其质量是保障铁路安全运输的必要条件。重轨的生产过程中除了对材质、加工工艺、几何尺寸等有严格要求外,其表面质量缺陷(如轧疤、夹杂、线纹等)也是非常重要的技术指标[1]。
当前重轨表面缺陷的视觉检测方法已经成为了研究的热点。国外,加拿大NDT公司开发的重轨质量监测系统和奥地利NextSense公司开发的表面缺陷及轮廓检测系统实现重轨表面三维检测。国内相关研究起步较晚,重庆大学的叶苏茹、谢志江、欧阳奇等人[2~4]在热态重轨辐射特性、光源及摄像机选型、图像处理以及缺陷识别提取等方面做出大量的工作;北京科技大学的徐科[5]以及四川大学的张朝勇[6]等人在普通视觉检测方案的基础上加入激光线光源,通过结构光三维视觉原理实现了钢轨表面缺陷三维检测方法。
大量的研究均集中于检测系统中设备的选型等问题和图像处理算法等方面。然而在机器视觉系统中,成像位姿很大程度地影响着所拍摄图像的品质,并且一幅高质量的图像是后续缺陷能够检出的先决条件。本文将摄像机成像角度作为重点研究对象,通过构建优化策略和图像评价,得到重轨表面视觉检测系统的摄像机最佳成像角度。
1 重轨表面检测区域分割
重轨的表面十分复杂,由多曲面多平面组合而成。根据重轨生产企业的统计数据,重轨的表面缺陷主要集中在重轨表面的转折连接弧面上,尤其以轨腰的上下腰面处最为突出,其次为表面精度和质量要求较高的底面和踏面[1,4,7]。针对这种情况,在满足性能并节约成本的基础上,视觉检测系统通常采用6个摄像机环绕配置,如图1所示。摄像机4和摄像机1分别拍摄轨头踏面和轨底底面,这两个面变化平缓,比较容易拍摄。摄像机2和摄像机6拍摄轨头侧面、轨头底面以及部分轨腰腹面,摄像机3和摄像机5拍摄轨底侧面、轨底顶面以及部分轨腰腹面,这几处位置转折面转角大,曲面变化复杂,所需景深大,对成像效果提出较高的要求。

图1 重轨表面检测摄像机环绕布置图
2 摄像机成像角度优化
2.1 角度优化方向
本文中为了便于观察和计算,将重轨截面放正,如图2所示,由于重轨截面基于中线OO'对称,则选摄像机2和摄像机5的成像角度为代表进行优化。本文中优化时忽略镜头视场角和自身变形率的影响,并以摄像机光轴代表拍摄方向。

图2 相机2与相机5成像角度示意
摄像机光轴的角度变化对视场中物体的呈现有较大的影响,尤其是如摄像机2和摄像机5视场中转折较大的弧面。通过总结,摄像机光轴的角度优化遵循以下三个方向:
1)有效视场最大化方向,即指在摄像机拍摄视场内,重轨表面被拍摄区域的有效像素面积应最大。如图2,摄像机2的视场中,重轨表面拍摄区域最外端分别为A与B ,令AB连线与重轨截面对称轴OO'夹角为2β ,摄像机光轴与OO'夹角为2α ,定义有效视场占比为有效像素的实际占用面积与理论最大占用面积的比值,则有效视场占比表示为
2)区域均匀化方向,即指摄像机光轴与拍摄区域的局部区域尽可能垂直。本文中使用摄像机光轴与曲面的最小夹角minθ 来度量该垂直程度,即将重轨拍摄区域的轮廓分割成小段微元 1lΔ 、2lΔ …nlΔ ,每段微元与摄像机光轴的所夹锐角为 θ1、 θ2… θn,minθ 是其中的最小值。因此,minθ 代表了该摄像机光轴与重轨表面局部区域夹角的最坏估计,调整摄像机光轴与重轨截面对称轴OO'的夹角α使得minθ 最大,这样能够避免出现局部畸变过大,平均照顾视场中的每个区域。
3)最小景深方向。摄像机选用镜头时需要考虑景深的问题,尤其对于重轨表面这样弯折大的曲面形状,再加上重轨运动状态下的振动问题,景深如果不够则会导致图像模糊[8]。不同的摄像机光轴角度需要不同的景深,对于选取镜头有实际指导意义。镜头景深的图示如图3所示,其计算公式如式(1)所示。

图3 镜头景深示意图
景深:

式中δ为容许弥散圆直径,f为镜头焦距,F为镜头光圈,L为拍摄距离。
2.2 角度优化结果
根据上述优化策略,以60Kg规格的重轨为对象,优化的结果分别如表1、表2所示。同时并根据优化结果构建相应角度的图像采集系统进行图像拍摄,该系统采用DH-HV5051UM-M面阵相机和Computar H0514-MP2镜头,最大分辨率2592×1944pixels,焦距为5mm,光圈调节范围为F/1.4至F/16,拍摄距离为270mm,容许弥散圆直径取0.011mm,取光圈F/4,求得景深LΔ =322mm。

表1 摄像机2的成像角度优化结果

表2 摄像机5的成像角度优化结果
由结果可见,系统的景深是远远满足要求的,摄像机2的各优化策略结果差异较大,这是与摄像机2所拍摄区域的折弯变化较为剧烈有关,则2α 的取值需要通过图像质量评价才能确定。而摄像机5的各优化策略结果和实际图像均很相近,说明5α 取在48°是十分理想的。
3 优化结果的图像质量评价
3.1 图像质量评价的一般方法
图像清晰度评价函数是衡量数字图像质量的重要指标。现有的图像清晰度评价方法一般建立在图像边缘或信息熵的统计信息基础上,即是图像细节保留的越多,图像灰度的变化越敏锐、越剧烈,则图像越清晰,可辨识程度越高。基于这类思想,常见的图像清晰度评价函数主要包括梯度函数、频谱函数和熵函数等[9,10]。
3.2 重轨表面图像的综合性评价方法
重轨的表面情况复杂,单一的评价函数不足以评价其表面图像的质量。因此,本文利用HALCON软件平台,根据重轨的几何特征,同时参考图像的灰度直方图特征、迹线灰度特征、灰度均值等信息[11],并使用梯度函数中的灰度方差函数以及熵函数计算结果共同组成关于重轨表面图像的综合性评价方法。
灰度方差函数:

其中I是当前图像,µ定义为I的灰度平均值:

熵函数:
对于一幅图像,其图像熵H(I)定义为:

根据香农信息理论,当其图像能量E(I)一定时,图像熵E(I)越大,则图像越清晰。
4 角度优化结果评价
将摄像机2以其光轴与重轨截面对称线OO'夹角分别为75°、65°、56°拍摄的图片依次导入评价系统中,同时并根据式(2)~式(4)计算出该图的灰度平均值、灰度方差和图像熵。其结果如图4~图6所示。

图4 光轴为75°时图片评价结果
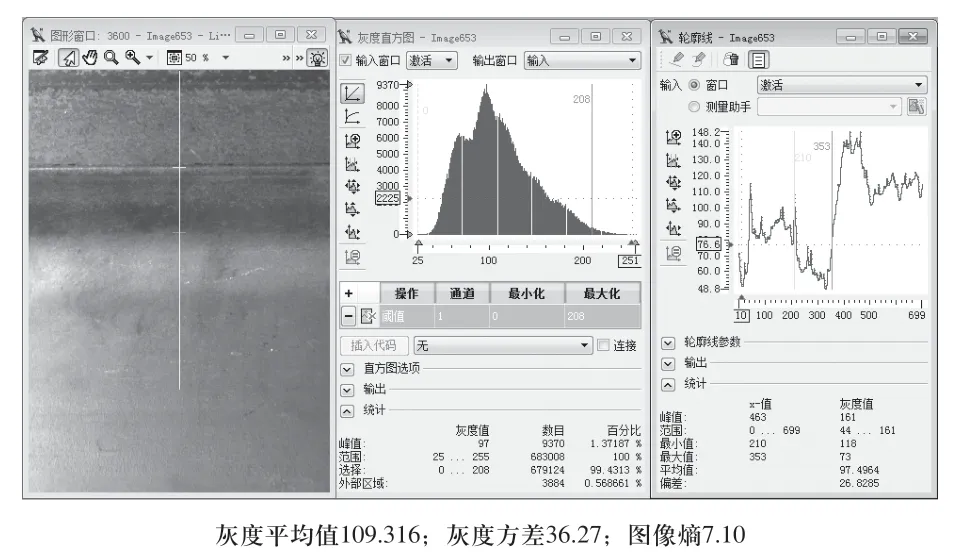
图5 光轴为65°时图片评价结果

图6 光轴为56°时图片评价结果
从评价结果可以看出,此三幅图像的灰度方差和图像熵的计算结果均相差不大,可见在此三种角度下摄像机的成像细节都很清楚,说明摄像机的分辨率、景深、对焦等都符合成像要求。结合灰度平均值、图像的几何信息以及灰度迹线特征来看,摄像机以75°拍摄时轨头侧面及轨头底面的灰度值不足,导致整体灰度平均值偏低,并且图像中轨头侧面被过度拉伸而轨头底面则被严重压缩,存在严重的失真。摄像机以65°和56°拍摄时,整体灰度平均值均较高,灰度方差和图像熵也比较接近,但在纵向(沿图中轮廓线)方向上,摄像机以65°拍摄图像中轨头侧面占210个像素,轨头底面占143个像素,而摄像机以56°拍摄图像中轨头侧面占171个像素,轨头底面占168个像素。相比之下,以56°拍摄的图像中对轨头底面展现的像素更多,且轨头侧面与底面宽度之比更符合实际情况,所以56°更优。
通过以上分析,在满足景深、拍摄分辨率、对焦准确的条件下,摄像机2的光轴与重轨截面对称线OO'夹角为56°时拍摄的图像最佳,图中灰度分布均匀,畸变小,各结构分布合理,能够均衡地表现出各个局部区域的图像细节。
5 结束语
本文结合重轨的表面轮廓特点和缺陷分布的重点区域,对摄像机的拍摄角度进行研究,得出各摄像机的最佳成像角度。同时整理出所有重轨型号对应的各摄像机最佳成像角度数据,并将其转换为卧倒状态,且定义摄像机成像角度为以重轨截面坐标系中以X正轴为起点逆时针旋转的角度,所得数据如表3所示。
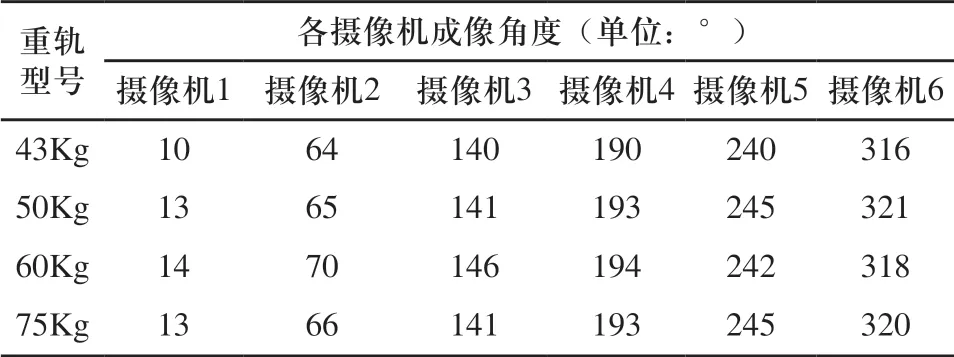
表3 全部重轨型号的摄像机最佳成像角度(卧倒状态)
本次研究得出的数据为重轨表面视觉检测系统的成像装置布置提供了理论依据,也为能够适应于多型号重轨轧制线的视觉检测装置的设计提供了研究方向,具有重要的意义。
[1] 谢长贵,谢志江.热态重轨表面缺陷机器视觉检测的关键技术[J].重庆大学学报,2013,36(10):16-21.
[2] 叶如苏,胡治民,欧阳奇,等.基于机器视觉的重轨表面缺陷检测系统的研究[J].现代制造工程,2007,89-93.
[3] 王玉梅,谢志江,王翔,等.基于机器视觉的高速重轨表面质量在线监测关键技术[J].机械与电子, 2008,(8):47-49.
[4] 谢志江,陈涛,楚红雨,等.热态重轨表面缺陷在线检测方法及关键技术[J].重庆大学学报,2012,35(3):15-19.
[5] 徐科,杨朝霖,周鹏,等.基于激光线光源的钢轨表面缺陷三维检测方法[J]. 机械工程学报,2010,46(8):1-5.
[6] 张朝勇,苏真伟,乔丽,等.一种基于LED和线激光的钢轨表面缺陷检测系统[J].科学技术与工程,2012,12(36):9877-9880.
[7] 谢志江,米曾真,陈涛,等.热态重轨表面缺陷检测技术[J].计量学报,2013,34(1):1-6.
[8] 韩芳芳,段发阶,王凯,等.机器视觉检测系统中相机景深问题的研究与建模[J].传感技术学报,2010,23(12):1744-1747.
[9] 李峰.数字图像质量检测技术的研究与实现[D].江苏:江苏大学, 2005.
[10] 陈亮,李卫军,谌琛,等.数字图像清晰度评价函数的通用评价能力研究[J].计算机工程与应用,2013,49(14):152-155.
[11] 刘源泂.基于机器视觉的钢板表面成像优化与三维检测关键技术研究[D].武汉:武汉科技大学,2011.
猜你喜欢
成都信息工程大学学报(2021年4期)2021-11-22
摄影之友(2020年12期)2020-12-23
电脑爱好者(2018年17期)2018-11-05
中国公共安全(2017年11期)2017-02-06
办公自动化(2016年18期)2016-12-17
新闻前哨(2015年2期)2015-03-11
兵工学报(2011年10期)2011-02-22
数码摄影(2009年8期)2009-10-14
电影评介(2009年9期)2009-05-13
数码(2009年3期)2009-03-16
