多功能一体化原子化器设计
2015-03-22 06:32魏立峰王庆辉赵幼南
沈阳化工大学学报 2015年4期
魏立峰, 骆 阳, 王庆辉, 李 月, 赵幼南
(1.沈阳化工大学 信息工程学院, 辽宁 沈阳 110142; 2.沈阳华光精密仪器有限公司, 辽宁 沈阳 110036)
多功能一体化原子化器设计
魏立峰1, 骆 阳1, 王庆辉1, 李 月2, 赵幼南2
(1.沈阳化工大学 信息工程学院, 辽宁 沈阳 110142; 2.沈阳华光精密仪器有限公司, 辽宁 沈阳 110036)
多功能一体化原子化器是原子吸收分光光度计采样系统的重要组成部分,要求装置定位在光路上并保证精确可靠.为集成5种功能于一体,硬件设计以STM32为核心的电机控制模块和气路控制模块,采用实时分布式结构.系统利用S曲线算法实现了双轨行进控制定位,并设计了气体压力检测和气路控制,保证系统通气安全.实验结果表明:原子化器能够实现5种功能的快速平稳切换,提高仪器定位精度及效率.
原子化器; STM32; S曲线; 双轨行进
当今市场上销售的多功能原子吸收分光光度计需要用户手工装卸不同种类的原子化器,并且切换步骤繁琐,加大了用户的工作量和人为因素对仪器测量的影响[1].随着各行业标准的完善和原子吸收分光光度计应用于越来越多的行业,该类仪器所测定的元素种类相对较少,操作流程复杂,仪器占据空间大[2],已经不能满足用户的需求.多功能一体化原子吸收分光光度计集成火焰原子吸收分光光度计、石墨炉原子吸收分光光度计、氢化物原子吸收分光光度计、紫外可见分光光度计、火焰光度计5种仪器功能,能测定73种元素的含量,只需要用户通过操作界面简单地设置,就能自动完成不同种类原子化器的切换,大大提高了用户操作效率.本文主要介绍使用双处理器来实现多功能一体化原子化器的设计,完成火焰原子化器(火焰吸收分光光度计和火焰光度计使用同一装置)、石墨炉原子化器、氢化物原子化器、光度计比色皿4种装置切换,以及5种分析方法所需气体的电磁阀控制.
1 原子化器系统设计
原子化器系统设计主要由嵌入式单板计算机(EPIC)、CAN收发器、STM32微控制器、光电开关检测、电机驱动模块、气体压力检测、电磁阀模块组成,系统结构如图1所示.整个仪器采用实时分布式结构,EPIC作为上位机,提供界面让用户管理不同测量方法的切换以及气路状态的改变;CAN收发器采用的是GY8507 USB-CAN总线适配器,通过USB接口连接一个标准CAN网络,实现上位机与下位机的交互通讯;STM32微控制器作为下位机,芯片支持现场总线CAN功能,满足控制步进电机和气路状态检测及控制的要求[3];光电开关作为检测元件,用于设置机械结构的零点位置,为定位做参照基准;步进电机模块是由3个A3977驱动的步进电机组成,分别控制前置原子化器的水平定位、高度定位以及石墨炉原子化器的定位;气体压力传感器检测4路气体(空气、乙炔、笑气、氮气)的压力,保证通气安全;气路控制模块主要控制9个电磁阀(空气阀、乙炔总阀、乙炔工作阀、笑气阀、氮气阀、石墨炉头阀、石墨炉内气阀、石墨炉外气阀、氢化器阀)的状态.
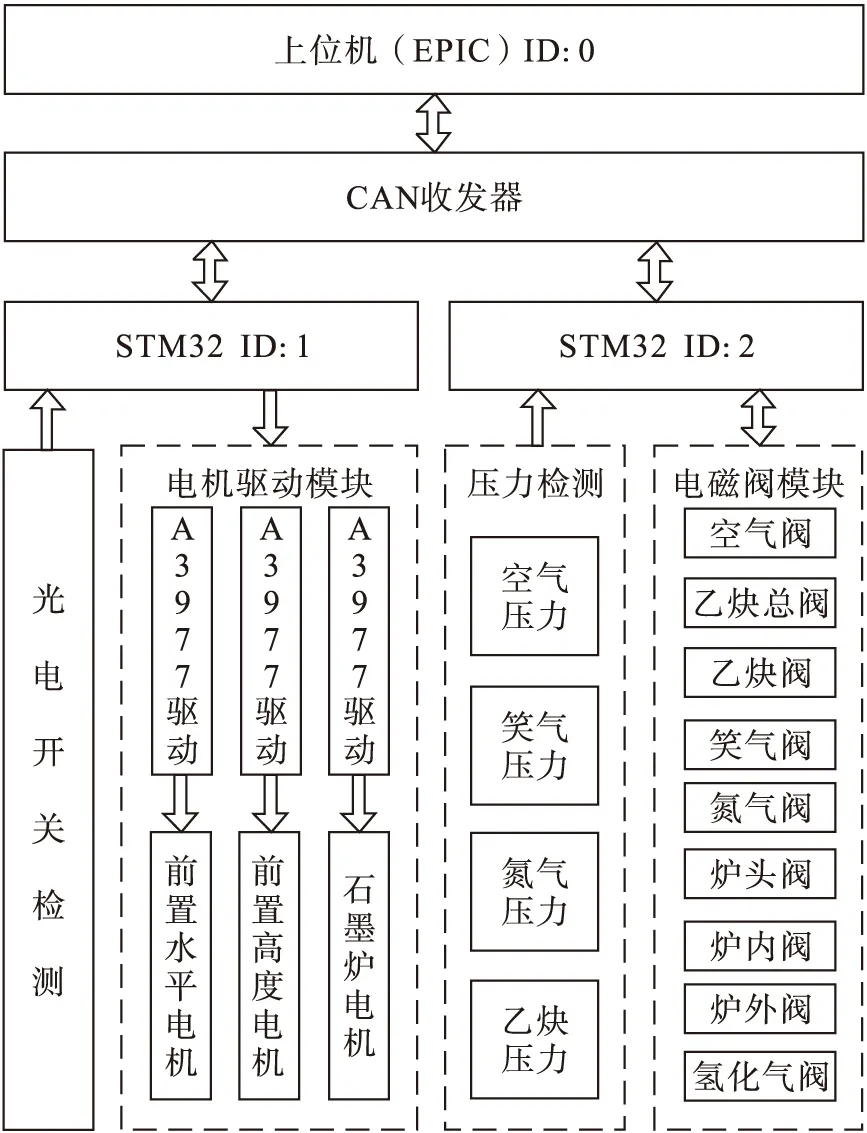
图1 原子化器系统结构
上位机(ID:0)经过CAN收发器,向CAN总线发送扩展帧,下位机接收CAN帧触发中断,通过对扩展帧的组装和解析,提取信息,实现功能;STM32微处理器(ID:1)接收到上位机(ID:0)所发出的定位指令,控制A3977芯片分别来驱动三个步进电机(前置水平电机1、前置高度电机2、石墨炉电机3),同时检测光电开关的状态来确定电机复位的零点位置,成功定位后向上位机发送成功定位信息.STM32微处理器(ID:2)接收到上位机(ID:0)所发出的查询指令,采集4种气体压力值和控制9个电磁阀的开关并把当前状态反馈给上位机;STM32的GPIO驱动电压为3.3 V,A3977的最佳逻辑电压为5 V,因此,使用电平转换芯片LJ245A来提高GPIO的驱动能力,如图2所示.利用74HC595是为了节省STM32控制端口,方便对电机的配置.STM32分别用84脚、85脚、86脚、87脚来控制电机的方向、使能、步数、复位,而使用67脚、77脚、78脚则控制74HC595的RCK、SCK、SI,进而控制电机的细分数、睡眠模式[4].

图2 电机驱动电路图
空气、笑气、乙炔、氮气的压力检测放在气路最前端,在打开电磁阀前,先检测4种气体压力是否满足开阀要求.空气阀、笑气阀控制火焰法时助燃气的切换;乙炔需要2个电磁阀,乙炔阀控制火焰法乙炔的使用,而如果仪器检测到乙炔有泄漏,乙炔总阀将被主动关闭,保证仪器的安全[5];石墨炉内气阀、外气阀、氢化器阀主要控制氮气在石墨炉法和氢化物法中的使用;石墨炉头阀则控制石墨炉头的开合,方便用户更换石墨管.气控模块示意图见图3.

图3 气控模块示意图
2 原子化器结构设计
双轨行进控制指的是两个电机实现同时进行不同速度、不同距离、不同方向地定位动作.在传统的原子化器设计中,切换不同测量方法时需要用户手动更换设备,这大大地增加了人为因素对仪器测量精度的影响,同时也增加了对原子化器机械结构在更换过程中的磨损[5].通过STM32控制步进电机来切换所需方法的设备,无需手动更换,这让用户能够更加方便地使用仪器,也保证了仪器的安全性能.该设备所用到的分析方法有5种,分别为火焰吸收法、石墨炉法、氢化物法、光度计法、火焰发射法.这5种方法则对应4种不同的设备,即火焰原子化器(火焰吸收法和火焰发射法共用)、石墨炉原子化器、氢化物原子化器、比色皿.利用双轨行进控制,快速地实现5种方法之间的切换成为需要改进的地方.
仪器的光源由元素灯通过出射光孔射入燃烧室,所以,光源位置是固定的.控制前置水平电机1和前置高度电机2,将火焰喷射器的缝口定位到光路正下方2 mm并与光路平行,如图4所示.为了节约实验空间,光度计法所需要的比色皿则需要架在火焰喷射器上,图4中虚线位置即比色皿的位置.光度计法实验时,紫外可见光从入光孔透过架在火焰喷射器上的比色皿,控制前置水平电机1来移动比色皿的位置,使光路透过不同池的样品试剂或空白试剂.

图4 火焰法(光度计法)定位示意图
氢化器和火焰原子化器设计为一体,即前置原子化器,如图5所示.氢化器固定在火焰喷射器背面,控制前置水平电机1和前置高度电机2将氢化器定位在光路上,让光源正好通过氢化器石英加热管.
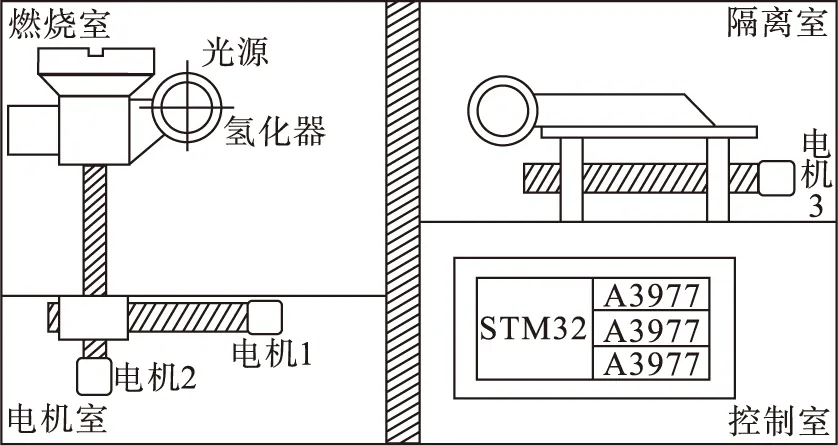
图5 氢化物法定位示意图
石墨炉原子化器与前置原子化器则为两个不同的机械结构,控制石墨炉电机3来定位石墨炉位置.由于火焰法和氢化物法中所发生的反应会产生污染,所以,石墨炉原子化器在不工作的情况下定位在隔离室中,防止污染石墨炉中的石墨管.通过图6可发现,石墨炉定位到光路上时,由于前置原子化器结构的限制,必须将其降到燃烧室的底部,来保证石墨炉的顺利定位.石墨炉只需要水平定位而无需高度定位,这减少了电机的使用,同时也增加了对3个电机控制的要求.

图6 石墨炉法定位示意图
3 双轨行进控制算法设计
步进电机具有控制精度高、控制简单等特点,即使在开环条件下也能获得较高的控制精度.但是步进电机在启动时,也存在着启动慢、启动失步和启、停段冲击大等现象[6],因此,增加对步进电机启动、停止阶段的加速度控制,保证步进电机启、停时加速度和速度的连续性以减小冲击具有实际意义.在该设计中,主要使用S形曲线算法来控制电机的动作[7].
双轨行进定位主要用于前置原子化器,即同时控制前置水平电机1和前置高度电机2.在电机动作前,首先要通过定位距离、电机步距角和细分数计算出2个电机所要定位的步数,并进行比较,设计中规定两个电机在减速过程中需要同步吻合,即两电机同时停.图7为双轨行进流程图,通过比较两电机的步数,规定先动的电机为M1,后动的电机为M2.M1由于定位步数多,必定有加速、匀速、减速3个过程,即表示为长距离定位,而M2的定位步数少于M1,则相比于M1会出现3种情况,分别用长距离、中距离、短距离来区分M2的这3种情况.下面使用M1、M2同时动作的速度曲线图来解释双轨行进定位.
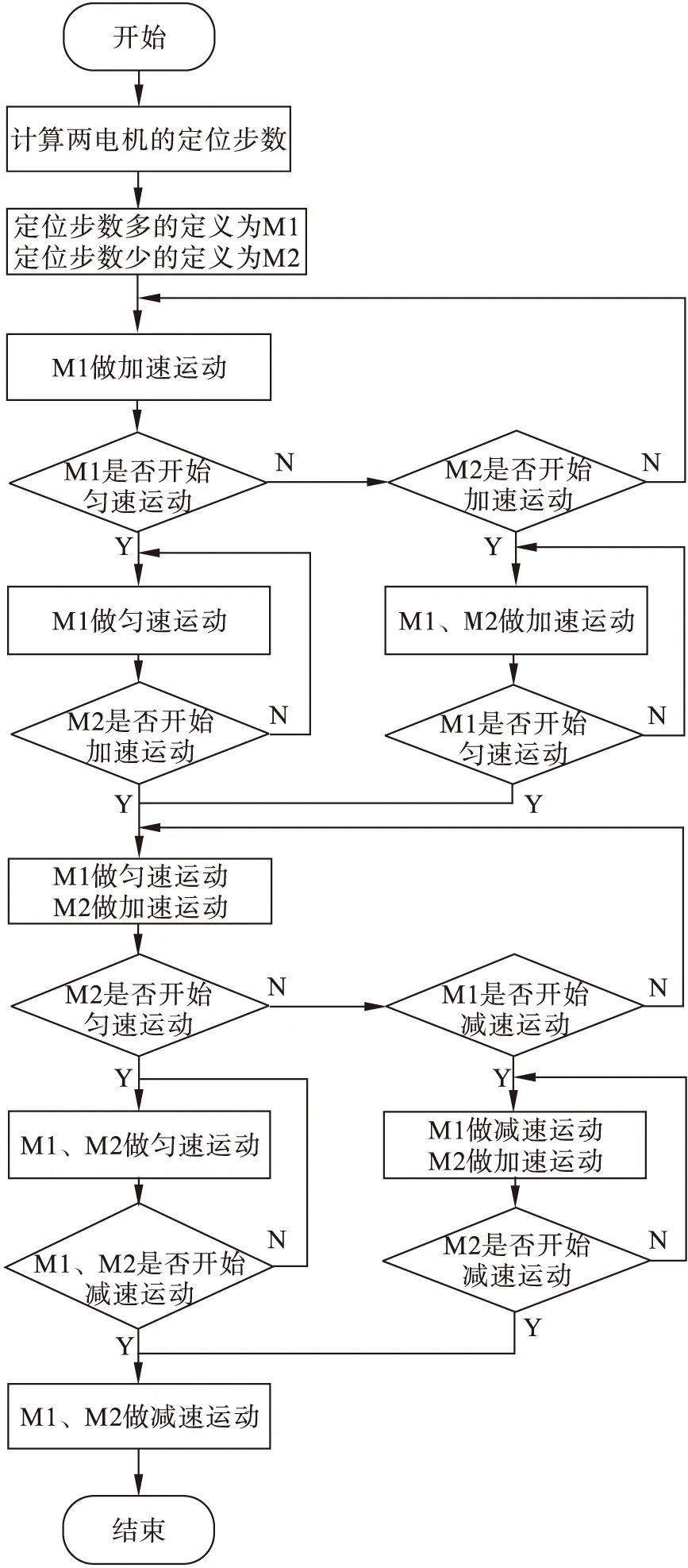
图7 双轨行进流程
两个电机定位步数,影响着它们运动状态的变化,所以协调好电机动作至关重要.由于M1定位距离必定为长距离,而M2定位可在长、中、短距离上变化,图8、图9、图10给出了在M1为长距离定位而M2为长、中、短距离定位时的情况.图8中,当t=0时,M1先启动,做加速运动;当t=t1时,M1仍在做加速运动,M2开始加速运动;当t=t2和t=t3时,M1、M2分别进入匀速运动,速度为v1;当t=t4时,M1、M2同时开始减速运动,由于M1和M2做的减速运动曲线吻合,2个电机的控制实现也就变得容易了.图9中,M1、M2所做运动状态与图8基本一致,唯一不同之处在于M1做匀速运动时,M2刚开始做加速运动.而图10中,M2做短距离定位,当t=t4时,M1做减速运动,M2做加速运动,两者的速度正好相同,此时速度为v2,此时M2随着M1做减速运动直到停止.

图8 M1、M2长距离定位

图9 M1长距离定位、M2中距离定位

图10 M1长距离定位、M2短距离定位
4 结束语
实验中,为了了解S曲线算法对步进电机产生的效果,分别使用匀速控制、直线加速度控制、S曲线加速度控制3种控制方式,对其最大匀速速度和启动的现象进行比较(见表1).表1中电机速度无法直观地表达,用电机输出频率来代替速度,其关系成正比.启动频率为直线加速度和S曲线加速度开始加速时的瞬时频率,经过一段时间加速后能进入匀速运动.最大匀速频率为电机由于速度过快出现丢步现象的临界值.10 cm定位所消耗时间指电机从启动到停止所使用的时间,匀速控制只有一个过程,直线加速度有恒加速、匀速、恒减速3个过程,而S曲线加速度则有7个过程,分别为加加速、匀加速、减加速、匀速、加减速、匀减速、减减速.启动现象主要为电机抖动的状态.

表1 匀速、直线加速度、S曲线加速度控制电机的现象比较
从表1可知:使用匀速控制时,电机启动抖动厉害,匀速最大脉冲频率为5 kHz,超过该频率,电机就出现“丢步”的现象;使用直线加速度,电机启动比匀速控制时抖动较小,但仍然有抖动,匀速最大脉冲频率为7.14 kHz;使用S曲线加速度控制,电机启动无抖动,匀速最大脉冲频率为7.26 kHz.可以发现,步进电机在升降速过程中,脉冲频率的变化不合理,就会使电机失步或者过冲,使系统无法做到精确定位,而在实验中,利用S曲线算法的目的就是克服不同程度的加减速突变,保证在启动和升速时,步进电机产生足够的转矩驱动负载,能达到规定的速度和加速度,以及在降速时负载不产生过冲,能停止在规划的位置.考虑到抖动对电机、仪器使用寿命等的损害,选用S曲线加速度控制效果更好.双轨行进控制比单轨行进控制提速一倍以上,有效地节省测试时间,提高了自动化控制效率.
[1] 彭杨.浅谈原子吸收分光光度计[J].大众标准化,2010,4(S1):63-65.
[2] 于红梅,王超.国产原子吸收光谱仪器的发展现状及新趋势[J].现代科学仪器,2010,12(6):81-83.
[3] 闭金杰,罗晓曙,丘森辉.基于CAN总线的一体化两相步进电机驱动器的设计[J].电子技术,2012,5(5):30-32.
[4] 马晋,彭福红,任作新.基于A3977两相步进电机驱动器的应用[J].机械管理开发,2007,12(6):42-43.
[5] 坂本正文.步进电机应用技术[M].王自强,译.北京:科学出版社,2010:21-23.
[6] 杨超.基于S曲线的步进电机加减速的控制[J].电机工程,2011,28(7):814-815.
[7] 张碧陶.S曲线加减速控制新算法的研究[J].控制与液压,2009,37(10):27-29.
Design of Multifunction Integrate Atomizer System
WEI Li-feng1, LUO Yang1, WANG Qing-hui1, LI Yue2, ZHAO You-nan2
(1.Shenyang University of Chemical Technology, Shenyang 110142, China;2.Shenyang Huaguang Precision Instrument Co.,LTD., Shenyang 110036, China)
Multi-functional integrate atomizer was an important part of the sampling system of atomic absorption spectrophotometer,for device positioning in the optical path to ensure accurate and reliable.In order to integrate the function of five analytical instruments,motor control module and pneumatic control module,which were based on STM32,employed real-time distributed structure for hardware design.The system achieved double-track location by the S-curve algorithm,and gas pressure detection and pneumatic control were designed,ensuring safety of the ventilation.The result shows that the system achieves apparatus switching fast and steady,improving the positioning precision and efficiency.
atomizer; STM32; S-curve; double-track location
2014-08-31
国家重大科学仪器设备开发专项(2014YQ240713)
魏立峰(1962-),男,浙江绍兴人,教授,博士,主要从事智能测控技术与装置的开发与研制.
2095-2198(2015)04-0353-05
10.3969/j.issn.2095-2198.2015.04.012
TP23
A
猜你喜欢
中国生殖健康(2020年5期)2021-01-18
教书育人(2020年11期)2020-11-26
当代陕西(2020年13期)2020-08-24
天津行政学院学报(2019年4期)2019-10-08
中国生殖健康(2018年5期)2018-11-06
世界家苑(2018年6期)2018-07-23
中外书摘(2017年2期)2017-02-10
湖南有色金属(2016年3期)2016-05-18
当代化工研究(2016年9期)2016-03-20
当代化工研究(2016年5期)2016-03-20