
城市轨道交通站后折返安全防护距离研究
2015-03-18 10:47李伟,阳彬
郑州铁路职业技术学院学报 2015年2期
李 伟,阳 彬
(1.武汉铁路职业技术学院,湖北 武汉 430205;2.武汉铁路局武汉电务段,湖北 武汉 430071)
0 前言
城市轨道交通以其站点覆盖面广、商圈范围直达、准点便捷、低碳环保等优点已逐渐成为人们出行的首选;同时,城市轨道交通的建设也带动了站点周边的商业发展,成为区域经济实力的象征。随着城市化进程的不断加快,人们对于城市轨道交通的运营和服务质量提出了进一步的要求。早晚高峰更大运量、发车更加密集、运营更加准点等,成为了城轨建设者不断追求的目标。
城市轨道交通的信号系统是保证列车运行安全、实现行车指挥和列车运行现代化、提高运输效率的关键系统设备。因此,在城轨工程设计初期,线路和站场专业就必须根据信号专业的要求设计特殊区域的线路长度。如,折返线区域的保护区段长度设置过长,对系统折返效率提升有限,并会大大增加建设成本;如果该区段设置过短,则会严重降低折返效率,减少高峰时期的运能和运量。如何在信号安全、运营效率和建设投资之间找到一个最佳平衡点,成为工程设计的一个难题。本文针对如何设置折返区域的保护区段长度,从运营折返效率的角度,分别对高架(或地面)站和地下站的折返进行仿真和定量分析,得出了相关结论。
1 ATP(列车自动防护系统)防护下的安全防护距离确定
基于通信的列车自动控制系统(ATC)——CBTC 是目前应用于城市轨道交通信号控制领域可持续发展的最先进技术,自2004 年7 月28 日武汉轻轨1 号线(国内首条CBTC 运营线路)开通运营以来,我国城市轨道交通新建线路和旧线改造基本上全部采用CBTC 作为主用系统。列车自动控制系统ATC 包含了列车自动防护系统(ATP)、自动运行系统(ATO)和自动监控系统(ATS)。在CBTC 系统下,列车常用驾驶模式为ATO 自动驾驶模式,列车速度由计算机控制,速度变化平滑,增加了乘坐舒适性和安全性;同时可降低驾驶员的劳动强度,并能实现与屏蔽门联动、精确停车等功能。ATP 用来保障列车的速度不会超出限制,确保列车运行的安全。在ATO 驾驶模式下,ATP 防护下的列车紧急制动曲线如图1 所示。

图1 ATP 防护下的列车紧急制动曲线
由图1 可知,列车在ATO 驾驶模式下,列车速度应保持在紧急制动触发线以下,正常制动的停车位在S1 处。一旦出现紧急情况,列车速度超过ATO 控制曲线触碰到紧急制动触发线、此时正好处于最大坡度的下坡路面、紧急制动率为最小值时,列车会主动切断牵引力,实施ATP 紧急制动,停车点会在S2处[1]。可以看出安全距离是基于列车安全制动模型计算得到的一个附加距离,它保证追踪列车在最不利条件下能够安全停在前行列车后方而不发生追尾;所以,安全距离是移动闭塞系统的关键,它是附加在常用制动距离上的一段安全富余量。列车在行驶过程中,追踪列车和前行列车之间始终保持一个常用制动距离再加上一个安全距离。S1 和S2 之间的距离就是安全防护距离,既是指ATP 绝对停车点与ATO 停车点之间的长度,该距离与列车的动拖比、紧急制动率、钢轨粘着系数等有关。
2 折返线安全防护距离的计算
2.1 折返区域信号设备布置原则
折返区域影响线路长度的主要信号设备包括信号机和计轴器。信号机和车头顶端(或有效站台边缘)的距离受司机瞭望距离的限制,计轴器和岔尖前基本轨缝的距离受牵引回流线及安装条件的限制。
2.1.1 司机瞭望距离
车头顶端(或有效站台边缘)至前方信号机的距离要求包含两个限制因素:其一是列车车窗下沿对司机视线的遮挡;其二是当信号机设于左侧时,车窗侧沿对司机视线的遮挡。如图2 所示,以矮柱信号机最下方灯位为计算对象,(a)图中,A:司机眼睛距轨面的高度2.38m;B:司机眼睛距车窗下沿的高度0.22m;C:车窗下沿距轨面的高度2.16m;D:司机眼睛至车窗下沿的水平距离0.55m;E:司机瞭望信号机的俯角28°;F:车窗底部至车头悬出的距离0.6m;G:信号机最下方的灯位最下沿距轨面的高度0.1m。当信号机设于右侧时,受车窗下沿对司机视线的遮挡,司机能够确认信号的最小距离为(车头悬出至信号机)4.08m;当信号机设于左侧时(因屏蔽门影响,部分出站信号机需设于线路左侧),受车窗侧沿对司机视线的遮挡,司机能够确认信号的最小距离为(车头悬出至信号机)4.9m。工程中,取该值为5m。
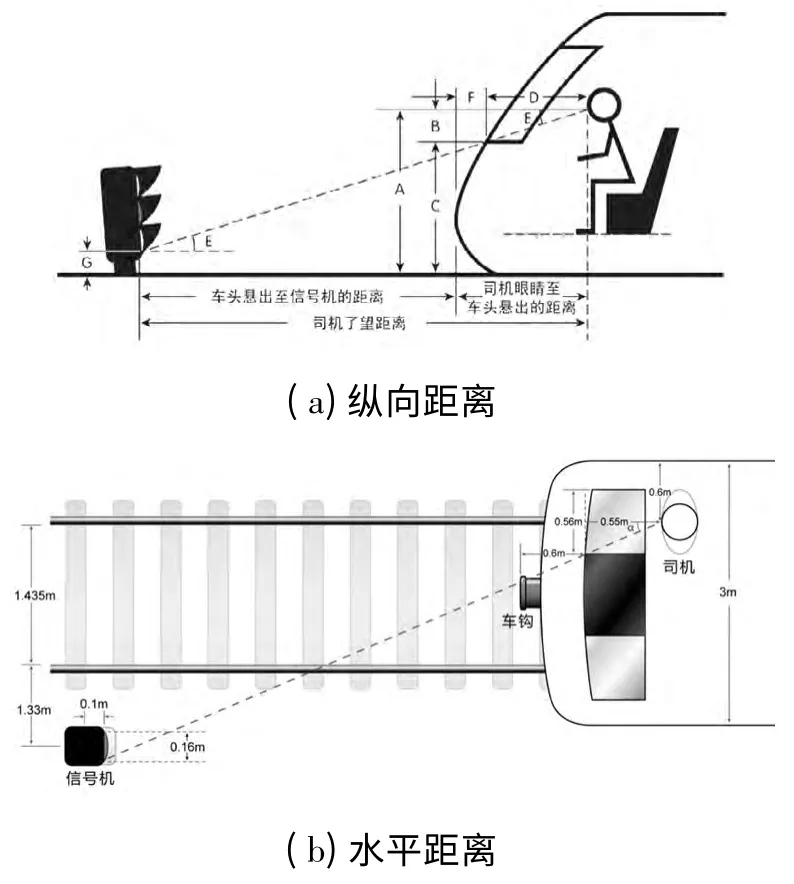
图2 司机瞭望距离
2.1.2 计轴器至岔尖基本轨缝的距离
任何计轴设备都会存在干扰抑制区,在该区域内不能安装牵引回流线等会带来强电磁干扰的设备,否则计轴器会出现计数不准的现象。计轴器的干扰抑制区为±0.45m;信号机前方的基本轨缝处要安装绝缘节鱼尾板和牵引回流线,绝缘节鱼尾板的标准宽度为0.42m,牵引回流线根据种类的不同,安装宽度在0.5m 左右。同时考虑到计轴设备不可能安装在枕木上,必须安装在枕木之间的空隙处,再加上工程安装误差等不确定性因素,计轴器距离岔尖前基本轨缝的距离一般设定为2.4m。
考虑到司机瞭望信号机的距离以及计轴器与道岔尖轨安装位置的要求,在计算安全距离的时候应将该部分数值计算进去。另外,在站台端部各个专业的设备及电缆相对集中,安装布局会有一定困难,因此,车头顶端(或有效站台边缘)距离道岔岔尖前基本轨缝往往大于5m +2.4m=7.4m,在实际工程中取值不小于8m。
2.2 折返效率分析
列车运行到交路折返站,必须进行折返操作才能实现上下行转换的换向运行。站后折返的效率远高于站前折返,因此,现阶段折返站的形式以站后折返为主。对于站后折返,列车必须待进站、停车、清客之后进入站后折返线,再利用折返线上的渡线完成上下行转换,进入另一侧站台[2]。两种站后折返的站场平面如图3 所示。
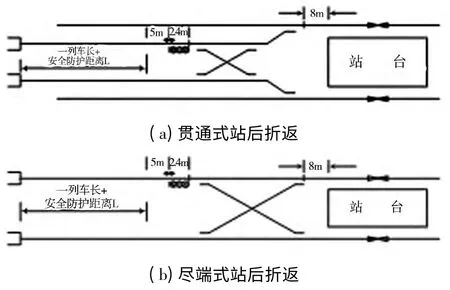
图3 站后折返示意图
对于站后折返,安全防护距离主要影响的是列车进入折返线的时间,安全防护距离越长,在折返过程中可保持高速运行的时间越长,折返时间也越短。另外一个影响安全防护距离的因素是紧急制动率,紧急制动率数值一般在0.78~0.88m/s2之间。高架或地面线路受天气影响较大,雨雪天气时粘着系数小(0.78m/s2),紧急制动率小,安全保护距离较长;地下线路则相反,紧急制动率较大(0.88m/s2),安全保护距离较小。
针对高架和地下两种不同的工程条件进行折返仿真,仿真参数如下:
a.列车长度为140 米(6 节编组、A 型车);
b.道岔为9 号道岔,岔尖至岔心9.95 米,岔尖至基本轨缝2.62 米;
c.站台区域、岔区、折返线坡度均为2‰,进站前区间坡度35‰;
d.正线土建限速:85km/h(信号不可突破,即最高运行速度80km/h);
e.道岔侧向土建限速:35km/h(不可突破);
f.车站限速60km/h(停站列车需考虑站台限速);
g.车辆参数:车辆参数如表1。
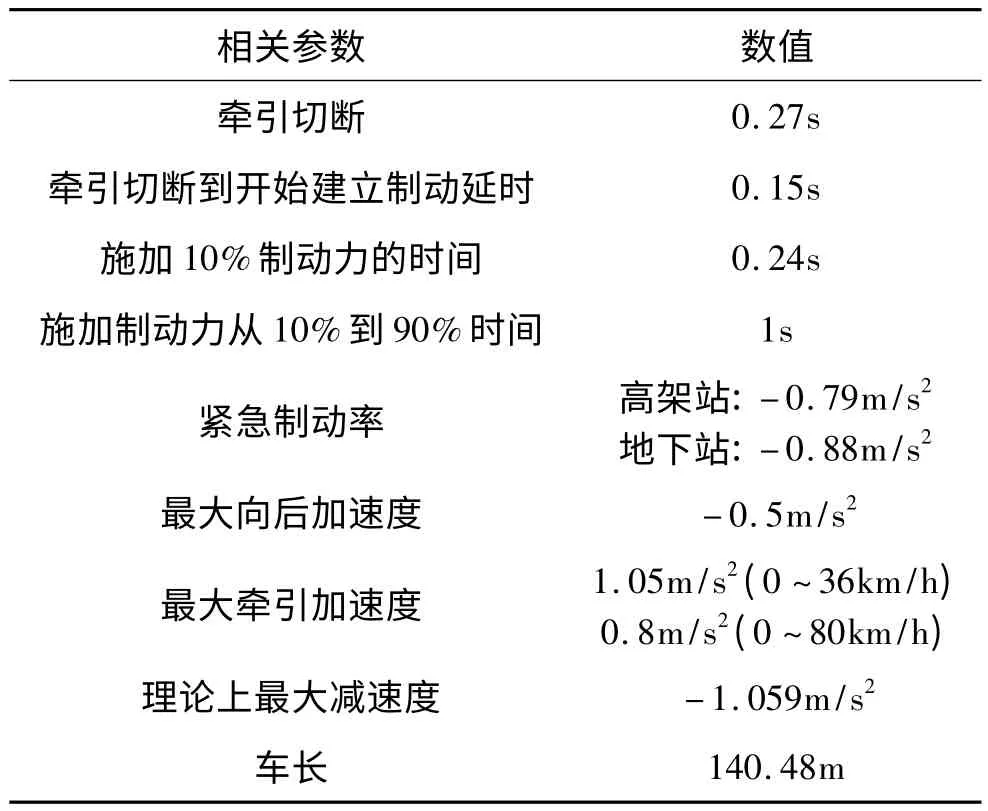
表1 车辆参数
2.2.1 高架站折返
对于贯通式站后折返,折返线保护区段长度和折返时间对照见表2。
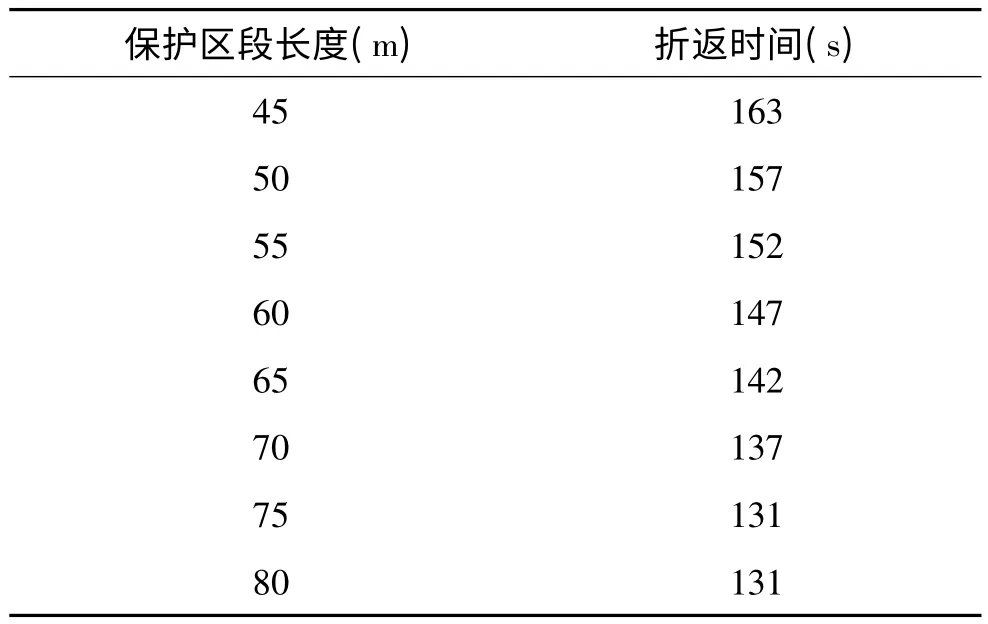
表2 贯通式站后折返的折返线保护区段长度和折返时间对照
对于尽端式站后折返,折返线保护区段长度和折返时间对照见表3。

表3 尽端式站后折返的折返线保护区段长度和折返时间对照
通过表2 和表3 可以看出,当保护区段长度大于65m 之后,贯通式折返效率提升有限,尽端式折返效率已接近极限值。所以高架站或地面站站后折返保护区段长度设置为65m 较为合理。
2.2.2 地下站折返
对于贯通式站后折返,折返线长度和折返时间对照见表4。

表4 贯通式站后折返的折返线长度和折返时间对照
对于尽端式站后折返,折返线长度和折返时间对照见表5。
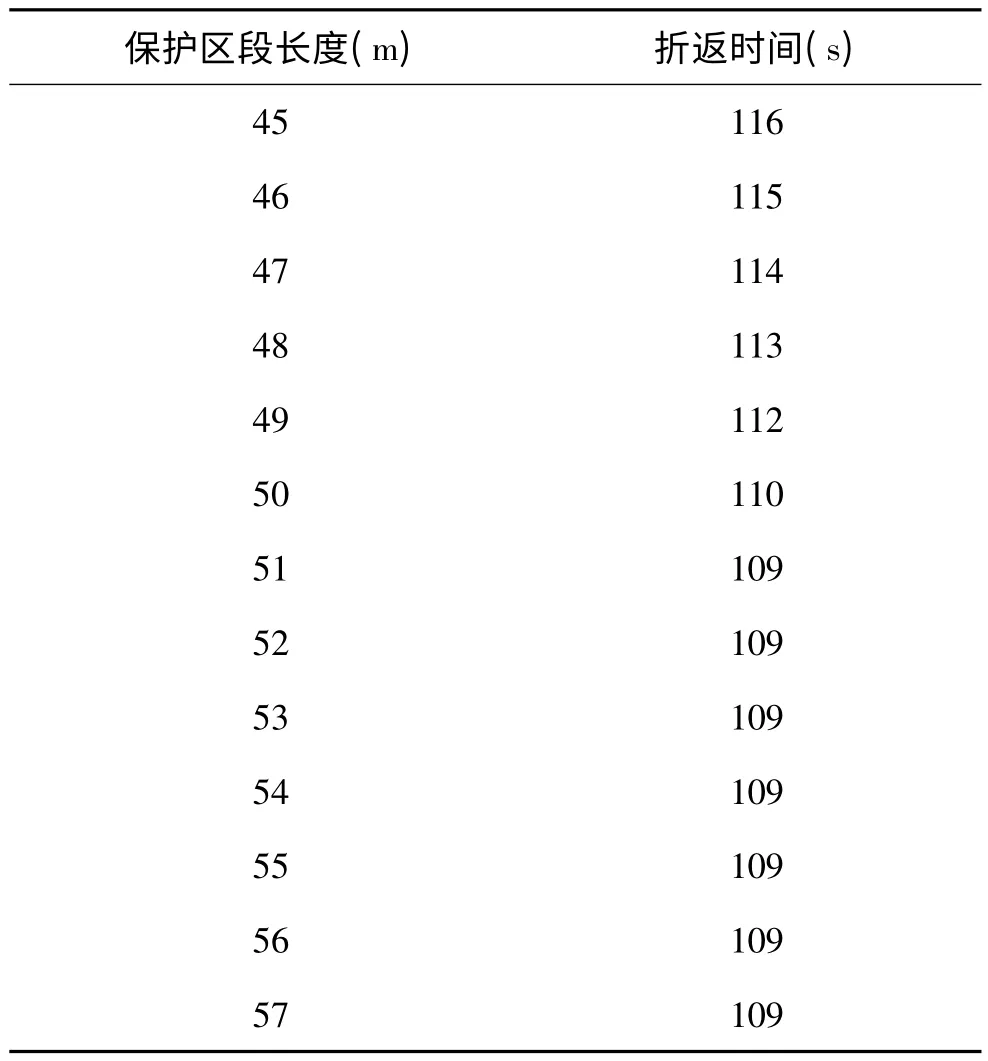
表5 尽端式站后折返的折返线长度和折返时间对照
通过表4 和表5 可以看出,当保护区段长度大于50m 之后,贯通式折返效率提升有限,尽端式折返效率已接近极限值。所以地下站站后折返保护区段长度设置为50m 较为合理。
3 结论
城市轨道交通建设和运营中,在增加运营安全系数的同时还要尽可能地提高运营效率,这和工程投资是相互矛盾的。受外界条件和投资的影响,折返线安全防护距离往往难以得到保证,信号系统只有降低折返速度、牺牲折返效率来保障行车安全;因此,在工程设计初期就应该合理地设置折返线安全防护距离,以保障行车效率并节约和控制工程投资。
[1]张滔.移动闭塞信号系统的安全距离计算浅析[J].铁道通信信号,2010,46(6):24-27.
[2]周鹏飞,刘金瑞.城市轨道交通工程折返线的防护距离分析[J].铁路通信信号工程技术,2009,6(1):36-39.
[3]苏云峰,邓志祥.城市轨道交通尽端式站后折返线长度及效率计算研究[J].城市轨道交通研究,2014(4):66-68.
猜你喜欢
能源与环保(2022年3期)2022-04-08
水利技术监督(2021年1期)2021-01-21
铁道通信信号(2020年5期)2020-09-21
铁道通信信号(2020年11期)2020-02-07
中国港湾建设(2019年12期)2019-12-18
天津城建大学学报(2019年5期)2019-11-07
铁道通信信号(2019年4期)2019-10-10
铁道通信信号(2018年1期)2018-06-06
女士(2017年10期)2017-11-01
发明与创新·小学生(2016年8期)2016-08-17
