
救援机器人收纳系统电机的同步控制
2015-03-15 06:17张西正李雪梅侍才洪尹理才李坦东
天津工业大学学报 2015年5期
张西正,李雪梅,侍才洪,尹理才,3,李坦东,3
(1.天津工业大学电子与信息工程学院,天津 300387;2.中国人民解放军军事医学科学院卫生装备研究所,天津
300161;3.天津理工大学机械工程学院,天津 300184)
救援机器人收纳系统电机的同步控制
张西正1,2,李雪梅1,2,侍才洪2,尹理才2,3,李坦东2,3
(1.天津工业大学电子与信息工程学院,天津 300387;2.中国人民解放军军事医学科学院卫生装备研究所,天津
300161;3.天津理工大学机械工程学院,天津 300184)
针对救援机器人收纳系统因负载扰动、机械结构误差等原因造成的不同步,从而对伤病员带来二次衍生伤害后果,提出在多电机主从控制方法的基础上,比较多种同步控制策略,并基于Matlab进行仿真实验.实验结果表明:同级电机之间采用基于模糊PID自整定的控制策略,而不同级电机之间采用基于PID的控制策略,从而使得多电机之间不仅具有良好的同步性能,而且对外部扰动表现出优良的鲁棒性.
救援机器人;电机同步;收纳系统;Matlab仿真;控制策略
近年来,自然灾害、人为灾害频繁发生,时刻威胁着人类的安全,引起了世界的广泛关注.救援机器人已经由简单的现场勘查发展到适应复杂环境替代医护人员完成伤员搬离.各国在救援机器人研究领域已取得了显著成就,其中美国的VECNA′S BEAR救援机器人采用的救援方式是“弯腰”抱起伤病员后搬离灾害现场,但这种拟人式救援方式并不适合脊椎受损的伤病员.日本的ROBOCUE机器人采用机械手臂将伤病员拖曳至可伸缩担架系统后利用传送带完成救援,这款机器人体积庞大而且强行拖曳可能会对伤病员造成一定伤害.我国军事医学科学院卫生装备研究所研究的救援机器人收纳系统,能够将伤病员平稳地从地面“拾取”并装载进入收纳系统内部,良好的电控操作系统可以保证将二次衍生伤害降到最低.其中救援机器人运动过程中电机同步性能优越,可以提高救援机器人动作完成的柔顺性和稳定性.本文研究救援机器人收纳系统电机的同步控制.
1 收纳系统及其控制系统的整体设计
救援机器人收纳系统的机械结构原理图如图1所示,主要包括人体类铲形拾取装置、人体输送装置和附属清障装置几个部分.在人体类铲形拾取装置、人体输送装置和人员安放装置的表面由传送带覆盖,装置内由多个滚筒电机驱动传送带工作,根据接触点相对静止技术,利用传送带完成伤病员从地面转移至收纳系统的工作.另外各装置之间用电动推杆连接,采用折叠式设计思路,减少整体结构尺寸使其能够自由进入空间狭小的灾害现场.救援机器人收纳系统运动规划如图2所示.
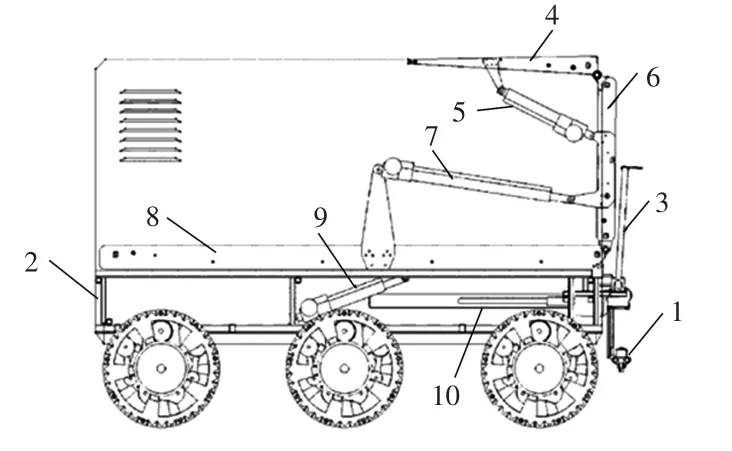
图1 救援机器人收纳系统机械结构图Fig.1 Rescue robot storage mechanical structure diagram
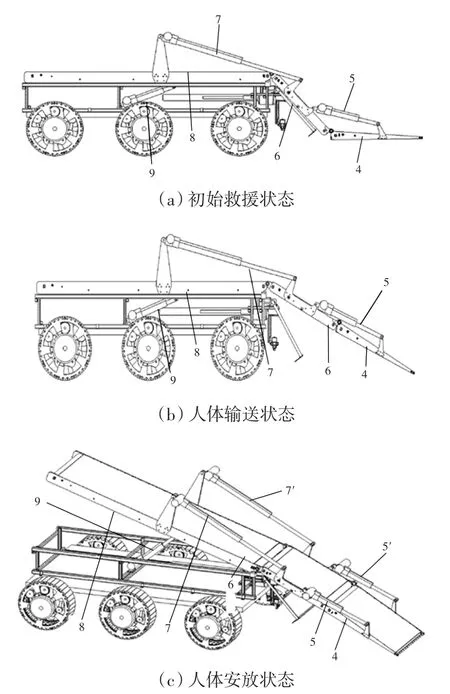
图2 救援机器人收纳系统运动规划Fig.2 Motion pianning for rescue robot storage system
图1中,控制电动推杆5和7动作,机器人收纳系统可以从图1所示初始状态展开为救援状态,如图2(a)所示,类铲形拾取装置与地面贴合后,电动推杆5和7停止工作.当伤员所处地形为斜坡或凹凸不平时,为了保证类铲形拾取装置能与地面充分接触,电动推杆5和7伸展程度随地形变化而改变.控制类铲形拾取装置4和人体输送装置6的传送带工作,救援机器人向前运动,使4的尖端进入人体头部与地面空隙,由于相对运动,人体躯干的胸部位置缓慢到达4尖端后4传送带停止工作,机器人整体后退调整姿态,控制5和7运动,收纳系统由图2(a)展开至图2(b)人体输送状态后,机器人向前运动,4传送带继续工作,当伤病员头部到达6的高端位置后,控制电动推杆9工作,收纳系统由图2(b)展开至图2(c)人体安放状态.当伤病员运送至人体安放装置8,传送带停止工作,5、7、9收缩,伤病员平稳进入收纳系统,救援完成.收纳系统恢复至图1初始状态.
从其运动规划可知:合理地控制各电动推杆的运动即可完成机器人指定动作.但是在救援过程中,由于伤病员姿势不易调节,当从地面拾取进入系统内可能会对系统造成受力不均的情况,从而出现系统工作不稳定、可靠性低的情况.因此各装置之间采用2个电动推杆连接,2个电动推杆同步工作时可以减少系统振动,提高系统稳定性.那么保证电动推杆动作完成的同步性就至关重要.
在实际系统中,电动推杆各转轴会因为环境引起电机参数变化、负载扰动等不可预知的因素失去同步,在运动过程中很容易产生振荡,就无法快速准确完成动作,出现误差影响救援.各装置表面覆盖的传送带的巩固与稳定也与电动推杆的同步运动有关,其同步不协调可能会造成传送带平面倾斜,如果机械材料刚度不够,电动推杆之间严重失调甚至会造成机械结构断裂,出现很大的安全隐患.另外各装置之间不同级的电动推杆也应该相互协调运动,误差较大同样会对收纳系统动作完成的柔顺性有很大影响.
因此需要电动推杆的同步,其中包括了同级电机之间速度一致的同步,不同级电机之间速度按照运动规划保持一定比例的同步.各级电机同步框图如图3所示.两者结合很高程度上加大机器人运动的稳定性与可靠性.

图3 救援机器人收纳系统电机同步框图Fig.3 Motor synchronous diagram of motor for rescue robot storage system
2 电机同步控制策略
收纳系统的电动推杆采用的是直线直流伺服电机,其结构简单、体积小,速度特性好,速度偏差小,且加速度大,定位精度高.另外直流直线电机安全可靠,运动平稳,噪声小,使用寿命长.
2.1 直流伺服电机数学模型
电枢控制式直流伺服电机的速度由电枢电压控制,电枢电流的微分方程为:

电机力矩的平衡方程为:

式中:La为电机电感;Ra为电机电阻;Ke为电机的电动势常数;J为电机的转动惯量;Kf为电机的粘性摩擦系数;Kl为电机的力矩常数;ia为电枢电流;Ua为电枢电压;Tl为负载力矩.
在零初始条件下对进行拉氏变换,则直流伺服电机模型

在SIMULINK中,直流伺服电机仿真模型如图4所示.

图4 直流伺服电机仿真模型Fig.4 Simulation model of DC servo motor
2.2 同级两电机同步控制策略
本文采用主从同步方法完成电机同步运动,并分别比较PID控制、模糊控制和模糊PID参数自整定控制这3种控制策略对电机同级与不同级之间同步控制的优缺点,并从中得出最优的控制策略.
首先对同级电机进行PID同步控制,仿真模型如图5所示.图5中,给定电机额定转速是1 200 r/min,主电机PID的输入是指定转速与其输出转速误差,从电机PID的输入是主电机的输出与从电机输出转速误差.仿真过程中不断在线修改PID的参数.基于PID同级电机转速仿真曲线如图6所示.
由图6仿真曲线可以得到,在0~1 s未达到同步的时间里,两电机之间存在正反转,且从电机相对于主电机的信号响应存在滞后性,跟随性不好.同一时刻两电机的转速偏差最高可以达到600 r/min,且一直持续比较高的转速偏差,直到临界同步时,转速偏差才缓慢减少.另外,从电机的失调量接近20%,相比高于主电机,PID控制具有的优点是两电机达到同步的时间比较快.

图5 基于PID的同步控制仿真模型Fig.5 Simulation model of synchronous control based on PID

图6 基于PID同级电机转速仿真曲线Fig.6 Speed curve of motor based on PID
模糊控制系统不依赖于精确的数学模型,特别适用于复杂系统.模糊控制中的知识表述、模糊规则和合成推理是基于专家知识或者熟练操作者的成熟经验.模糊控制系统的核心是模糊控制器.下面就采用基于模糊控制的电机同步,其中两电机转速误差e和误差变化率ec作为模糊控制的输入,输出为u.其中e、ec、u模糊量对应的模糊子集为{NB,NM,NS,ZO,PS,PM,PB},分别表示负大,负中,负小,零,正小,正中,正大,e和ec的论域为{-6,6},u的论域取{-7,7},且均采用三角函数隶属函数.

通过上式将实际偏差变化[a,b]变换成取值区间[-6,6].其中模糊规则是根据试验经验确定的.仿真模型图与仿真结果分别如图7和图8所示.
由图8中曲线可以看出,两电机能够平稳达到同步,初始状态两电机仍然存在正反转,同一时刻两电机转速差最高达到400 r/min,转速偏差随时间递增缓慢减小,从电机相对于主电机的信号响应跟随性好,振荡幅度小,但是达到稳定同步时间过长.

图7 基于模糊控制的同步仿真模型Fig.7 Synchronization simulation model based on fuzzy control
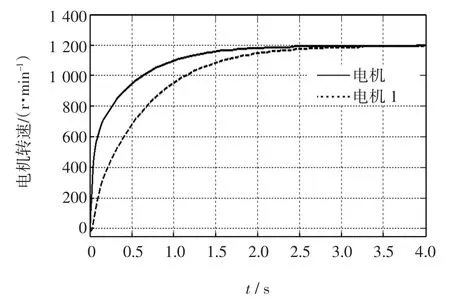
图8 基于模糊控制同级电机转速曲线Fig.8 Speed curve of motor based on fuzzy control
采用模糊PID参数自整定的控制策略对两电机进行同步控制,模糊PID参数自整定的控制策略是将相邻电机转速误差e及其误差变化率ec作为输入,找出PID补偿器3个参数Kp、Ki、Kd与e、ec之间的模糊关系,其中根据相关文献归纳的整定原则:
(1)当e较大时,为使系统具有较好的跟踪性能,取较大的Kp和较小的Kd,同时为了避免出现超调,Ki取零值.
(2)当e处中等大小时,为使系统响应具有较小的超调,Kp取较小的值,Kd、Ki取值适中.
(3)当e处于较小时,为使系统具有好的稳定性,Kp、Ki都应取得大一些.
同时为了避免系统出现振荡,Kp的取值同ec大小成反比.
在电机系统运行中通过不断检测e和ec的值,根据模糊控制原理对3个参数进行在线修改,可以满足不同时刻的电机转速e及其变化率ec对PID参数自整定的要求.基于模糊PID参数自整定的电机同步模型与仿真曲线分别如图9和图10所示.
由图10可以看出,两电机能够快速稳定达到同步,在未同步时,两电机不存在正反转,最大转速差为200 r/min,且转速差逐步减小,虽然从电机的失调量最高达到30%,但在很短的时间内两电机快速达到一致.相比较而言,这个仿真曲线收敛速度快,跟随性、稳定性都很好.
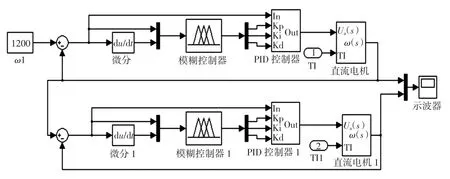
图9 基于模糊PID参数自整定的同步控制仿真模型Fig.9 Simulation model of synchronous control based on fuzzy PID parameters self tuning
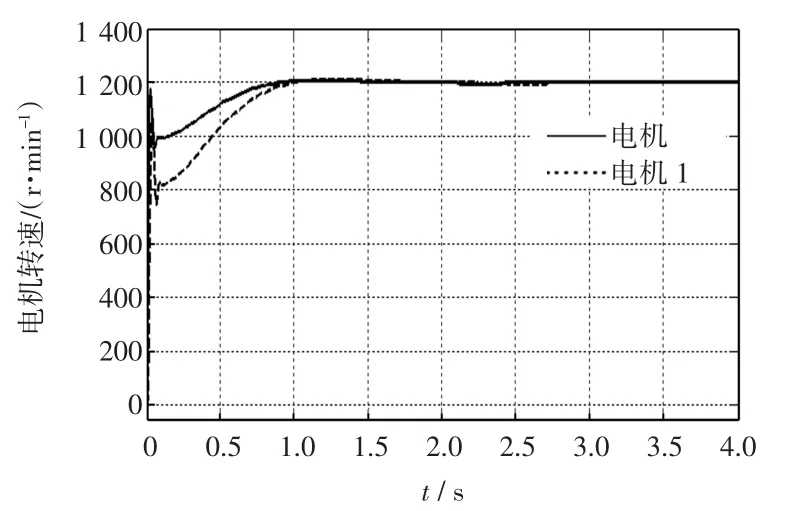
图10 基于模糊PID参数自整定同级电机转速曲线Fig.10 Speed curve of motor based on fuzzy PID parameter self tuning
2.3 不同级两电机按比例同步控制策略
不同级的电机按比例同步建模是在同级电机同步建模的基础上,在主电机给从电机转速反馈上按比例相应地增加一个增益.根据运动规划,其中由初始状态展开至救援状态时,长程电动推杆与短程电动推杆转速比为1∶2,其中长程电动推杆为主电机,短程电动推杆为从电机.因此下面就按照主从电机转速比为1∶2的比例进行不同级电机同步建模.图11—图13分别为基于PID控制、模糊控制、模糊PID参数自整定控制对不同级电机按比例同步的仿真曲线.
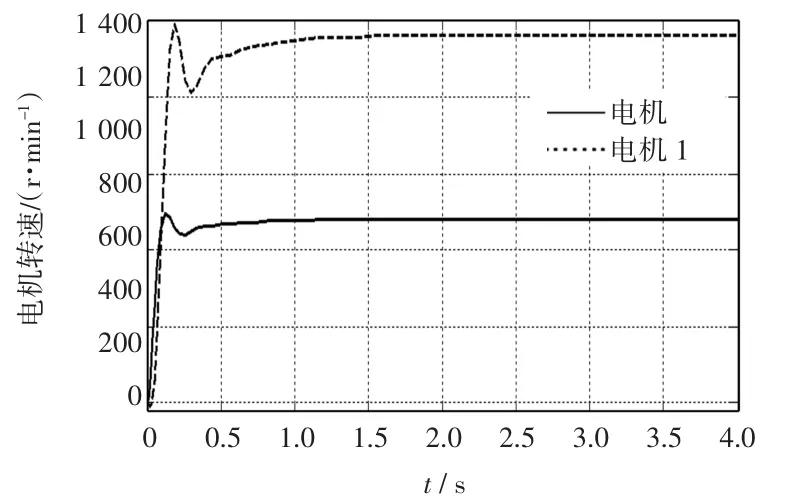
图11 基于PID控制的不同级电机转速曲线Fig.11 Speed curve of different motor based on PID control
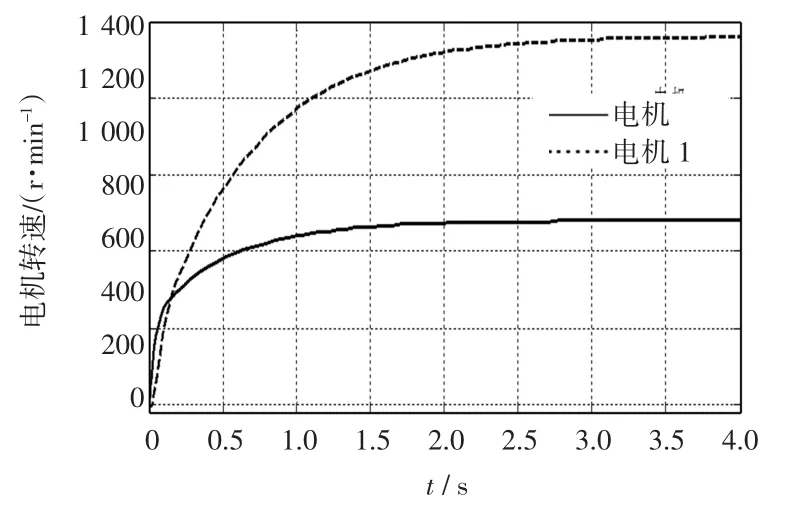
图12 基于模糊控制的不同级电机转速曲线Fig.12 Speed curve of different motor based on fuzzy control
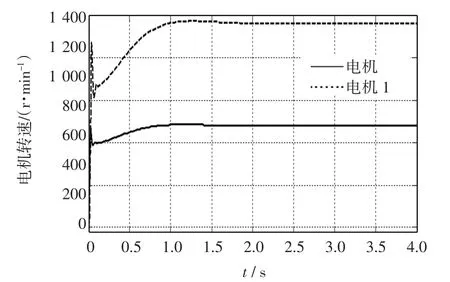
图13 基于模糊PID参数自整定的不同级电机转速曲线Fig.13 Speed curve of different grade motor based on fuzzy PID parameter
从图11中可以看出,在0~0.15 s的时间里,两电机存在失调现象,从电机的转速略低于主电机,但失调情况不严重,且维持时间短,0.15 s后两电机转速基本是按照给定比例相应增长,故两电机的跟随性比较好,并在短时间内快速达到相应同步.
由图12可见,两电机在0~0.2 s的时间里,两电机严重失调,从电机转速低于主电机转速的情况严重,主从电机转速比最高达到2∶1,0.2 s后逐步平稳同步,但过程缓慢,并且不是严格按照给定比例增长,达到相应同步的响应时间较长,误差比较大.
由图13可以看出,在初始时间里,从电机对主电机的响应比较慢,0~0.1 s时间里两电机的跟随性好,但从电机有一定的失调量.0.1~1 s时间里从电机的转速并没有按照比例跟随主电机增长.达到同步时间比较短,0~1 s产生的误差比较大.
3 结语
经过多次试验仿真,对比几种控制算法下电机同步的情况,观察曲线的变化情况可以得出,同级电机的同步采用基于模糊PID自整定的控制策略具有较好的优越性.而不同级之间的电机同步可以采用基于PID的控制策略,误差小,稳定性高.这2种策略都能够初步达到设计要求.救援机器人是一个集环境感知、动态决策、行为控制与执行等多种功能于一体的综合系统,通过合理的控制策略选择,可以实现救援机器人精确而又柔顺稳定地完成救援.
[1]张晶,曾宪云.基于MATLAB/SIMULINK直流电机调速系统模糊控制的建模与仿真[J].现代电子技术,2002(4):12-15.
[2]王忠礼,段慧达,高玉峰.MATLAB应用技术-在电气工程与自动化专业中的应用[M].北京:清华大学出版社,2007.
[3]肖磊.直流电机转速模糊控制系统设计[D].武汉:湖北大学,2007.
[4]刘金国,王越超,李斌,等.灾难救援机器人研究现状、关键性能及展望[J].机械工程学报,2006,42(12):1-12.
[5]李庆.智能搬运机器人控制系统设计与实现[D].合肥:安徽大学,2012.
[6]黄昕颖.基于MATLAB模糊工具箱的PID参数整定[J].机电信息,2011(3):39-40.
[7]ZHANG Qi,YANG Hao,WEI Yuguang.The modeling and simulation of mine rescue robot with brushless direct current motor based on fuzzy logical controller[C]//International Symposium on Innovation and Sustainability of Modern Railway. Beijing:Science Press,2014:100-107.
[8]STEINFEID A.Interface lessons for fuzzy and semi-autonomous mobile robots[C]//4thInternational Conference on Robotics and Automation.NJ:IEEE,2004:2752-2757.
[9]李金良,包继华,于岩,等.救援机器人自适应模糊控制的研究[J].计算机测量与控制,2010,18(5):1067-1069.
[10]刘晓红.突发灾害救援的装载机器人及其控制系统研究[D].西安:陕西科技大学,2011.
[11]李凯,贺昱曜.基于环形交叉耦合结构的多电机比例同步控制[J].电子设计工程,2014,22(15):149-151.
[12]彭晓燕,刘威,张强.基于改进型偏差耦合结构的多电机同步控制[J].湖南大学学报:自然科学版,2013,40(11):77-83.
[13]SHIH Y T,CHEN C S,LEE A C.A novel cross-coupling control design for bi-axis motion[J].International Journal of Machine Tool&Manuf-acture,2002,42(14):1539-1548.
Synchronous control of motor for rescue robot storage system
ZHANG Xi-zheng1,2,LI Xue-mei1,2,SHI Cai-hong2,YIN Li-cai2,3,LI Tan-dong2,3
(1.School of Electronics and Information Engineering,Tianjin Polytechnic University,Tianjin 300387,China;2.Academy of Military Medical Science,China Institute of Medical Equipment,Tianjin 300161,China;3.School of Mechanical Engineering,Tianjin University of Technology,Tianjin 300184,China)
Because of load disturbance and mechanical structure error and other reasons caused by non synchronization,the rescue robot storage system can bring secondary derivative damage consequences to the sick and wounded person. This paper put forward master slave control method of multi motors,and several kinds of synchronization control strategies are compared.The simulation experiments are carried out based on Matlab.According to the simulation results.the control strategy based on fuzzy PID self tuning control strategy is the optimal control strategy of the same level motors,and the control strategy based on PID is more suitable for different level motors.The result not only had satisfying synchronization performance,but also showed a good robustness against external disturbance.
rescue robot;synchronous motor;storage system;Matlab simulation;control strategy
TP242;TP13
A
1671-024X(2015)05-0043-05
10.3969/j.issn.1671-024x.2015.05.009
2015-07-10
中国博士后科学基金项目(2014M552620);军事医学科学院创新基金资助项目(2012CXJJ007)
张西正(1955—),男,研究员,博士生导师,主要研究方向为生物力学在战创伤救治及医用机器人中的应用.E-mail:z56787@sohu.com
猜你喜欢
宝钢技术(2022年4期)2022-12-23
机械管理开发(2022年5期)2022-07-07
机械制造(2022年3期)2022-04-07
中国急救医学(2022年1期)2022-01-26
中华灾害救援医学(2019年10期)2019-01-20
解放军健康(2017年5期)2017-08-01
中国核电(2017年1期)2017-05-17
制造技术与机床(2017年2期)2017-05-04
舰船科学技术(2015年8期)2015-02-27
航天返回与遥感(2014年5期)2014-07-31
