
数字闭环光纤陀螺仪的随机噪声分析
2015-03-15 06:17栾婧文
天津工业大学学报 2015年5期
崔 艳,栾婧文,顾 宏
(天津工业大学理学院,天津 300387)
数字闭环光纤陀螺仪的随机噪声分析
崔 艳,栾婧文,顾 宏
(天津工业大学理学院,天津 300387)
分别对影响陀螺仪性能的各种噪声进行了分析.利用闭环传递函数,建立了随机噪声模型,系统地研究了探测器接收光功率、偏置点和探测器跨阻抗与光纤陀螺仪随机游走系数(RWC)之间的关系.根据对随机游走系数模型的分析,选择了光学组件,组装成陀螺仪并对陀螺仪的参数进行了优化设计.得出陀螺仪的主要参数:探测器跨阻抗Rf为80 kΩ;光功率I0为100 μW;相对偏置点φb为4仔/5.将计算出的RWC理论值与利用Allan方差法得到的实际测量值进行了比较,验证了随机游走系数模型的正确性.
光纤陀螺仪;随机噪声;随机游走系数;闭环传递函数
光纤陀螺仪(FOG)是一种基于萨格纳克效应(Sagnac)的新一代的角速率传感器,由于它具有全固态、低成本、可靠性高、启动速度快等优点被广泛应用于飞机、潜艇、军舰、导弹、卫星等领域,成为近几年来国内外惯性器件的一个研究热点.根据工作原理来分,光纤陀螺仪被分为干涉型光纤陀螺仪(IFOG)、谐振腔光纤陀螺(RFOG)和受激布里渊散射光纤陀螺仪(BFOG).现阶段,干涉型光纤陀螺仪已基本成熟,其他2种光纤陀螺仪目前在实验和理论研究阶段[1-3].高精度的干涉型光纤陀螺仪通常使用数字闭环方案,采用这种类型的光纤陀螺仪具有高精度、动态范围大和标度因数线性度高等特点.光纤陀螺仪具有高理论灵敏度的优势,促进了过去30年全球对光纤陀螺仪的研究.与其他传统的机械陀螺相比,光纤陀螺仪有相对较大的白噪声.光纤陀螺仪用随机游走系数(RWC)来表征陀螺仪白噪声的大小[4].由于白噪声具有短时关联性,误差项迅速发挥作用,这将严重影响系统的短期过程.噪声对惯性系统初始姿态的自对准过程、寻北仪的寻北过程、各类惯性姿态稳定回路等影响较大,所以随机游走系数已经成为衡量FOG的性能优点的关键指标.张桂才等[5]分别考虑了探测器的宽带、偏置相位和FOG的光纤陀螺仪随机游走系数的关系,从而修正随机游走系数模型.本文分析了FOG的随机游走系数与检测器接收光功率、偏置点和探测器阻抗之间的关系.通过对比理论结果与实验测量数据,验证了随机游走模型的正确性,优化了陀螺仪性能.
1 数字闭环光纤陀螺仪的工作原理
一般来说,随机游走系数(RWC)是用来表征陀螺仪白噪声大小的一项技术指标.这反映了陀螺仪输出的角速度积分(角度)随时间积累的不确定性,还可以描述为单位检测带宽平方根等价旋转角速率的标准偏差.它们的关系表示为:

当闭环光纤陀螺仪在相位偏置点工作并只包含白噪声时,陀螺仪输出的零偏性能主要由零偏稳定性σΩ表征,定义为静态下光纤陀螺仪输出量相对其平均值的标准偏差.不考虑其他漂稳因素,零偏差稳定性σΩ与随机游走系数的关系为:
式中:t为测量零偏差稳定性的平均时间.
惯性系统的标准偏差的姿态误差引起的角速率白噪声可以被记为
提出闭环光纤陀螺的目的是解决开环陀螺仪的小动态范围和低精度问题.为了提高光纤陀螺的灵敏性并扩大它的动态输入范围,系统引入了方波偏置和数字相位斜坡反馈,使光纤陀螺始终工作在灵敏度最高的偏置点上.检测到旋转角速度的电压信号是通过相位调制器负反馈到光纤环而形成的,其大小等于萨格纳克相移,符号相反.通过这种方式,陀螺仪通常在偏置点的附近,旋转角速率就等于反馈信号.图1所示为数字闭环光纤陀螺仪的原理,其中包括6部分:掺铒光纤光源、3 dB耦合器、集成光相位调制器、光纤环、探测器和信号处理电路.

图1 数字闭环光纤陀螺的配置Fig.1 Configuration of digital closed loop fiberoptic gyroscope
在逻辑电路部分,方波调制φm=±φb,其中φb为调制幅度,它的半周期等于光在光纤线圈传播时间Δτg.解调得到的萨格纳克相移ΔφR用作数字逻辑电路部分数字相位斜坡的参考信号,数字相位斜波的阶梯持续时间等于Δτg,且等于台阶高度φs,φs=-ΔφR,反馈阶梯波和调制方波相互叠加,并通过D/A转换成模拟电压信号.这个电压信号加载到集成光学相位调制器上,并在光纤环中产生一个额外的偏置相位[6-9].
当陀螺仪在静止状态时,解调信号的振幅等于零,相位斜坡也等于零.调制电压波形相位调制器和探测器输出电压波形如图2所示.

图2 陀螺静止时的调制波形和探测器探测到的光电流Fig.2 Modulation wave and photocurrent in detector without rotation
当陀螺旋转时,解调信号不再等于零,相位斜坡的振幅等于萨尼亚克信号.相位调制器的调制电压波形和前后探测器输出信号反馈如图3所示.

图3 陀螺旋转时,调制波形和探测器光电流波形Fig.3 Modulation wave and photocurrent in detector while rotating
没有偏置调制时,检测器输出强光可以表示为:

式中:P0为被探测器接收的平均输出功率,当添加偏置调制,检测器的输出强光可以表示为:

在小信号的情况下,上述方程可以写成:

2 陀螺随机游走系数(RWC)模型和实验结果
在光纤陀螺仪中有3种噪声严重影响随机游走系数,它们分别是热噪声、探测器的散粒噪声和光源的相对强度噪声[10-14].
探测器阻抗热噪声的功率谱密度可以写成:

式中:k=1.380 658×10-23为玻耳兹曼常量;TK=298 K为绝对温度;Rf为探测器跨阻抗(kΩ).
散粒噪声的功率谱密度是表示为:

式中:iD=I0(1+cosΔφb)·RDi为探测器光电流;q=1.602×10-19C为电子电荷.
根据探测器提供参数,探测器的响应率RDi=1.4 A/W.
相对强度噪声的功率谱密度表示为:

式中:Δf=7.5×1012Hz为频谱带宽.
总的噪声功率谱密度可以写成:


式中:τ为光在光纤的传输时间;N为在半本征周期内的采样点数;L=4 300 m为光纤长度;D=0.2 m为光线环的直径;λ=1 550×10-9m;BL=19×106Hz为检测器带宽.
随机游走系数的理论计算结果曲线如图4—图6所示.
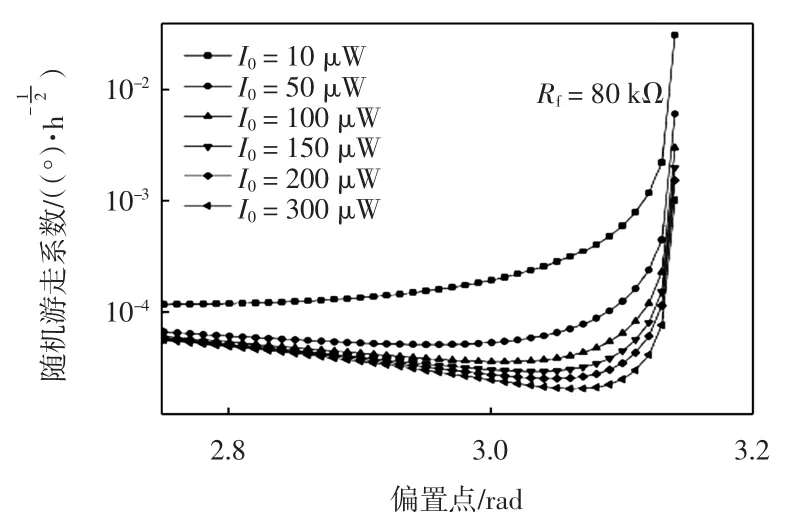
图4 随机游走系数与探测器接收光功率之间的关系(跨阻抗相同,偏置相位点不同)Fig.4 Relationship between random walk coefficient and phase bias under condition of different I0
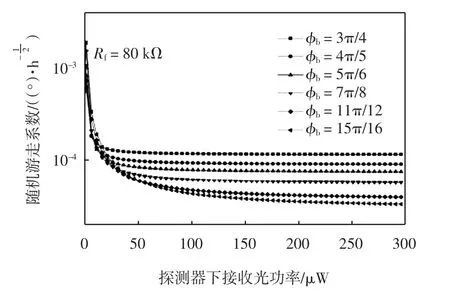
图5 在不同φb的条件下,随机游走系数和探测器下接收光功率之间的关系Fig.5 Relationship between Random walk coefficient and received optical power of detector under condition of different φb
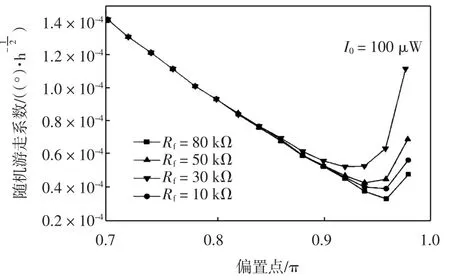
图6 在不同Rf的条件下,随机游走系数和相位偏置点之间的关系Fig.6 Relationship between random walk coefficient and phase bias under condition of different
由图4可以看出,在恒定的光功率的情况下,当相位偏置点位于π/2~π之间时,随机游走系数有一个最小值.当相位偏置点保持不变,探测器接收的光功率越大,随机游走系数越小.随着光功率的增加,越接近相位偏移振幅,随机游走系数的最小值越小.由图5可见,首先,随机游走系数随着探测器接收光功率的增加迅速降低,同时,随着光功率的进一步提高,随机游走系数不再减少,并且保持着不变.这表明,当光源功率大于一定值,相对强度噪声成为主要的噪声.由图6可以看出,探测器跨阻抗对随机游走系数也有很大的影响,跨阻抗阻值越大,随机游走系数越低.
根据随机游走系数的分析模型,选择了光学组件并组装成陀螺仪.陀螺的主要参数:Rf=80 kΩ,I0=100 μW,φb=4π/5.测试陀螺仪并使用Allan方差法测试数据,得到了随机游走系数如图7所示.
由图7可见,测试数据的分析结果和理论结果基本吻合,基本上验证了理论模型是正确的.测量值略大于理论值的主要原因是没有考虑电路噪声,背向散射噪声和其他形式的光路噪声.
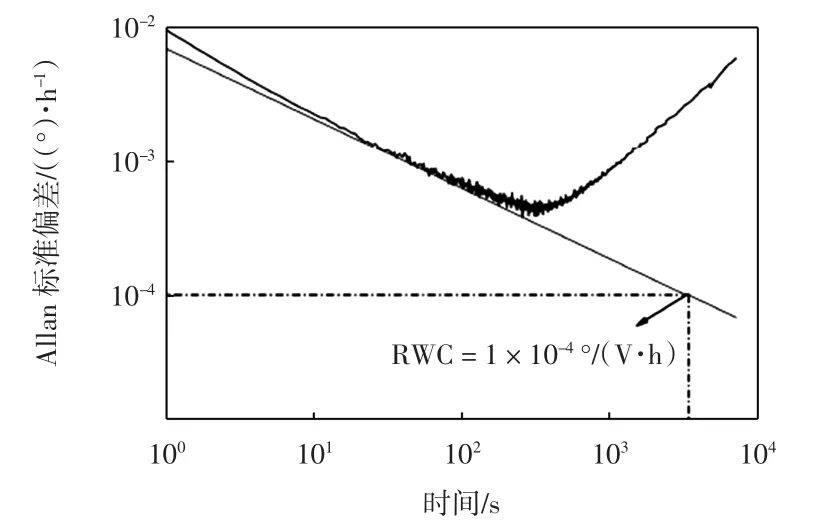
图7 由Allan方差分析的随机游走系数Fig.7 Gyro bias stability and random walk coefficient analyzed by Allan variance
3 结语
随机游走系数是衡量光纤陀螺的噪声水平的重要参数,其值的大小体现了陀螺的极限精度.本文分析了光纤陀螺随机游走系数和探测器接收光强之间的关系,跨阻抗阻值和相位偏置点之间的关系.得出陀螺仪主要参数:探测器跨阻抗Rf=80 kΩ,光功率I0为100 μW,相对偏置点φb为4π/5.从而使得陀螺仪的参数得到优化.使用Allan方差法的光纤陀螺仪的输出数据的分析结果与理论结果相比基本上是一致的.可以得知,随机游走模型和Allan方差分析的结果可以帮助我们对光纤陀螺仪进行优化设计,从而获得最佳的检测精度.
[1]顾宏.数字闭环光纤陀螺仪过调制技术研究[J].光电子·激光,2008,19(8):1035-1038.
[2]ZHANG Yan-shun,WANG Yuan-yuan,YANG Tao,et al. Dynamic angular velocity modeling and error compensation of one-fiber fiber optic gyroscope(OFFOG)in the whole temperature range[J].Measurement Science and Technology,2012,23(2):106-110.
[3]冷宗圣.光纤陀螺的研究发展及其应用[J].中国科技信息,2008(6):53-55.
[4]MA Huilian,ZHANG Guhong,LI Mucheng,et al.Zero-deviation effect in a resonator optic gyro caused by non-ideal digital ramp phase modulation[J].Optics and Lasers in Engineering,2010,48(10):933-939.
[5]张桂才,闾晓琴,刘凯,等.光纤陀螺随机游走系数模型的修正和实施研究[J].压电与声光,2009,31(1):18-20.
[6]KURBATOV A M,KURBATOV R A.Methods of improving the accuracy of fiber-optic gyros[J].Gyroscopy and Navigation,2012,3(2):132-143.
[7]吕葵.基于DSP实现的数字化闭环光纤陀螺 [J].中国惯性技术学报,2012,9(2):47-54.
[8]吴衍记,刘淑荣.数字闭环光纤陀螺频率特性分析与测试[J].中国惯性技术学报,2008,16(6):730-734.
[9]马迎建,王铮,张维叙,等.数字闭环光纤陀螺频率特性的计算和测试方法[J].北京航空航天大学学报,2002,28(6):640-642.
[10]HONG Ling-fei,ZHANG Chun-xi,FENG Li-shuang,et al. Frequencytrackingandlockingmethodusedinresonatormicrooptic gyro[J].Sensor Letters,2012,10(1/2):14-17.
[11]王夏霄.数字闭环光纤陀螺动态模型研究[J].中国激光,2013,40(2):0205002-0205006.
[12]ZHA Feng,HU Bai-qing,QIN Fang-jun,et al.A rotating inertial navigation system with the rotating axis error compensation consisting of fiber optic gyros[J].Optoelectronics Letters,2012,8(2):146-149.
[13]RAJULAPATI Radha Madhuri,JAANNATH Nayak,NASEEMA Sk.Modeling and simulation of signal processing for a closed loop fiber optic Gyro′s using FPGA[J].International Journal of Engineering Science and Technology,2012,4(3):947-959.
[14]刘保良.利用Allan方差进行光纤陀螺测试[J].现代电子技术,2012,35(13):127-133.
Analyzing random noise of digital closed-loop fiber optic gyroscope
CUI Yan,LUAN Jing-wen,GU Hong
(School of Science,Tianjin Polytechnic University,Tianjin 300387,China)
A variety of noise affecting gyro was analyzed.In addition,by using the closed-loop transfer function,the random noise model was established to systematically investigate the relationship between the detector receiving light intensity,bias operating point,the detector trans-impedance and fiber optic gyro random walk coefficient(RWC).Furthermore,the characters of the gyro was optimized.It is found that the main parameters of gyro are Rf=80 kΩ,I0=100 μW,φb=4仔/5.By comparing the theoretical values calculated by RWC with the actual measured values obtained by Allan variance,the correctness of the random walk coefficient model was verified.
fiber optic gyroscope;random noise;random walk coefficient;closed-loop transfer function
TN966;V241.5
A
1671-024X(2015)05-0081-04
10.3969/j.issn.1671-024x.2015.05.017
2015-05-25
国家自然科学基金资助项目(61304252)
崔 艳(1963—),女,副教授,硕士生导师,主要研究方向为图像处理及光纤传感方向.E-mail:cuiyan@tjpu.edu.cn
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
中国信息化(2022年5期)2022-06-13
北京航空航天大学学报(2021年9期)2021-11-02
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
快乐语文(2018年36期)2018-03-12
百科探秘·航空航天(2017年9期)2017-12-31
电子制作(2017年13期)2017-12-15
中国惯性技术学报(2017年1期)2017-06-09
