
密闭容器内两相液体的液位测量
2015-03-15 06:17王萍,刘尧,万凯
天津工业大学学报 2015年5期
王 萍,刘 尧,万 凯
(1.天津工业大学电气工程与自动化学院,天津 300387;2.中山大学信息科学与技术学院,广州 510006)
密闭容器内两相液体的液位测量
王 萍1,刘 尧1,万 凯2
(1.天津工业大学电气工程与自动化学院,天津 300387;2.中山大学信息科学与技术学院,广州 510006)
以密闭容器内油、水液位为检测对象,设计一种基于互相关算法的超声波液位测量系统.以C8051F120为系统的控制核心,硬件架构主要包括超声波收发电路、回波信号调理电路等.采用互相关算法从强噪声中提取回波信号,计算出互相关函数峰值所对应的渡越时间,从而测出油、水液位.在上位机,通过Visual Basic界面调用Matlab的动态链接库来实现互相关函数处理噪声干扰,提高有用信号的识别率.实验结果表明:该系统的测量精度控制在1%左右,并且具有实现简单、稳定性较高、重复性好等特点.
密闭容器;超声波;多介质液位测量;互相关算法
在工业生产中,常常会遇到密闭容器内具有高温、高压、易燃、强腐蚀性以及有毒等特性的多介质液位检测问题[1].液位检测技术有很多种:雷达法、光纤法等只能用于单介质液位的测量;多介质液位测量方法中,人工检尺法需现场接触式操作且精度不够,磁致伸缩法造价昂贵且易被高粘度液体附着失灵,分段电容阵列法制作工艺复杂、安装和维护成本高[2].作为一种非接触测量技术,超声波液位测量技术以低成本、高精度、稳定性好、易于维护等优点受到广泛青睐,并且发展迅速[3-4].但是,超声波液位测量过程受器件自身和工业现场等噪声的干扰比较大,为了准确获得超声波渡越时间,需对回波信号进行处理.强噪声中提取微弱的回波信号,测量渡越时间常见的算法有双阈值法、小波变换法、互相关法等[5].其中,双阈值法是基于信号幅度的固定阈值检测方法,测量误差会因信号幅度变化而增大;小波变换法适用于低信噪比情况下,但对硬件的采样率和计算能力有较高的要求;而互相关法计算量不是很大,适用于随机干扰和非周期干扰环境下提取有用信号,弱化噪声对测量结果的影响.基于以上分析,本文采用互相关算法进行滤波处理,以达到所需的液位测量精度[6-7].
1 系统整体设计
超声波换能器选用从SIUI公司定制的收发一体式探头1Z12N,其中心频率为高频段(1±0.1)MHz,压电晶片直径为12 mm,匹配阻抗范围为60~100 Ω,测量范围为0.2~3 m.探头采用外壁贴底安装方式,安装在密闭容器外侧底部[8].超声波油水液位测量系统结构如图1所示.
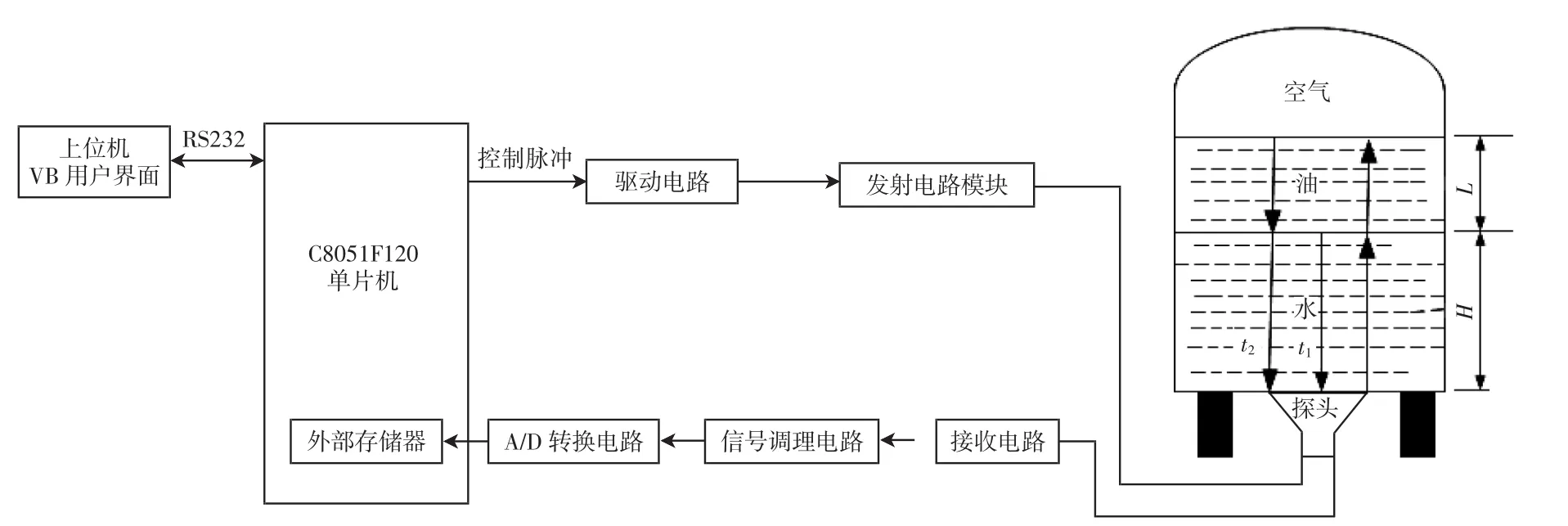
图1 超声波油水液位测量系统结构图Fig.1 Ultrasonic oil-water level measurement system structure
图1中,超声波油水液位测量系统结构图右侧为模拟密闭罐,根据超声波渡越时间法测距原理,水、油的液位高度分别如下:

式中:c1、c2分别为声波在水、油中的传播速度;t1为探头发射声波到第一次接收到脉冲回波信号所用的时间;t2为探头发射声波到第二次接收到脉冲回波信号所用的时间.
超声波液位测量系统首先通过高性能单片机C8051F120发射占空比为50%的脉冲信号来驱动探头,使其发射超声波.驱动电路采用全桥驱动芯片HIP4080,接收到的回波信号经过信号调理电路的放大与滤波、TLC5510高速A/D采集电路进行模数转换,最后送回单片机进行数据存储和处理,并采用RS232接口与上位机通信.
2 系统硬件设计
2.1 超声波发射与接收电路
超声波发射与接收电路原理图如图2所示.
图2中,LS1为超声波换能器,U2为全桥驱动芯片HIP4080.该驱动芯片正常工作的温度范围达到-40~ 85℃.通过控制引脚HEN可以使得电流在场效应管T2、T4自由翻转,以此来维持T1、T3的关闭状态.该芯片可以通过频率切换的方式使工作频率可达到1 MHz.输入的逻辑门槛电平选用范围为5~15 V.T1、T2、T3、T4都为N沟道耗尽型场效应管,组成高频H桥网络. C8051F120通过端口P2.3引脚发射脉冲信号,控制比较器IN+引脚与IN-引脚的电压差,以此来控制整个H桥网络.系统采用4个脉冲信号,3个正脉冲,1个负脉冲;T2每个脉冲都采用53个延时NOP指令的高电平,53个NOP指令的低电平.

图2 超声波发射与接收电路Fig.2 Ultrasonic transmitting and receiving circuit
2.2 信号调理电路
信号调理电路包括前级放大、有源带通滤波以及增益调节3部分,其原理图如图3所示.
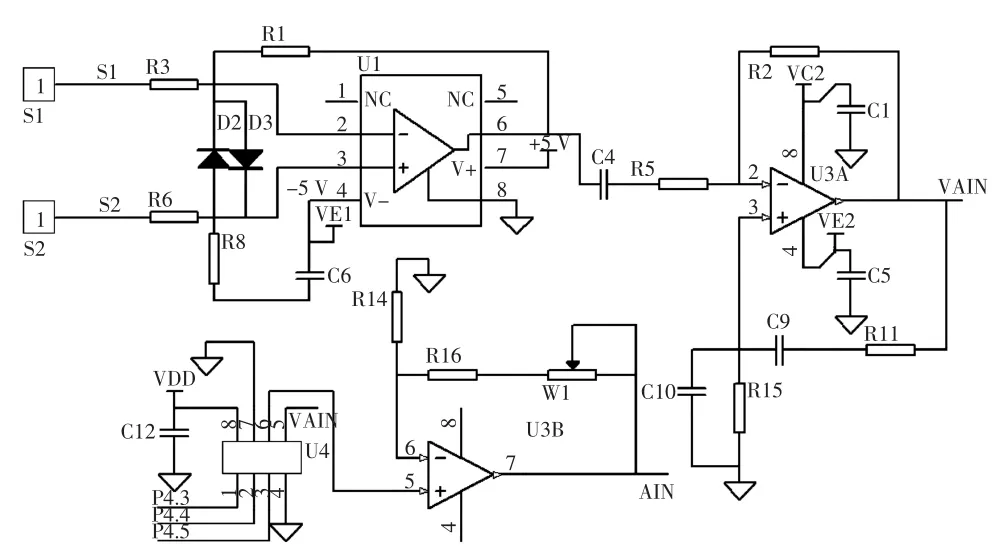
图3 信号调理电路Fig.3 Signal conditioning circuit
图3中,超声波回波前级放大电路采用单运算放大器LMH6647(U1)芯片,其最大的特点是输入输出端的电压范围可以达到电源电压,传统的运算放大器达不到.S1、S2为2个开关,直流放大倍数通过R1与R3来控制.D1和D2组成保护电路.
有源带通滤波器由R、C选频网络构成.LM358(U3A)为低功耗双运算放大器,具有频率补偿特性,能够达到较高的放大倍数和较大的工作电流,最大的输出电压为芯片工作电压的1.5倍.芯片的最大直流电压增益接近100 000,此时相对应的单位增益的带宽频率为1 MHz.
由于超声波在介质传播过程的散射和吸收,会按照指数规律衰减.为了提高超声波测量的精度,必须对超声波信号提供自动增益补偿[9].数字电位器接入运算放大器的正相端,使用单片机的P4.3、P4.4、P4.5引脚控制数字电位器ICL7660L(U4).数字电位器的输入端为带通滤波器的输出端VAIN,运算放大器的输出端为可由滑动变阻器W1调节的电压信号AIN.从而可实时调节经滤波后的回波信号幅值,使得增益值达到要求.
整个信号调理电路总放大倍数大约为10 000倍,前端放大倍数为200,带通滤波器的放大倍数为5,后端放大倍数为7~10倍.
2.3 信号A/D转换采集电路
信号A/D转换要集电路如图4所示.
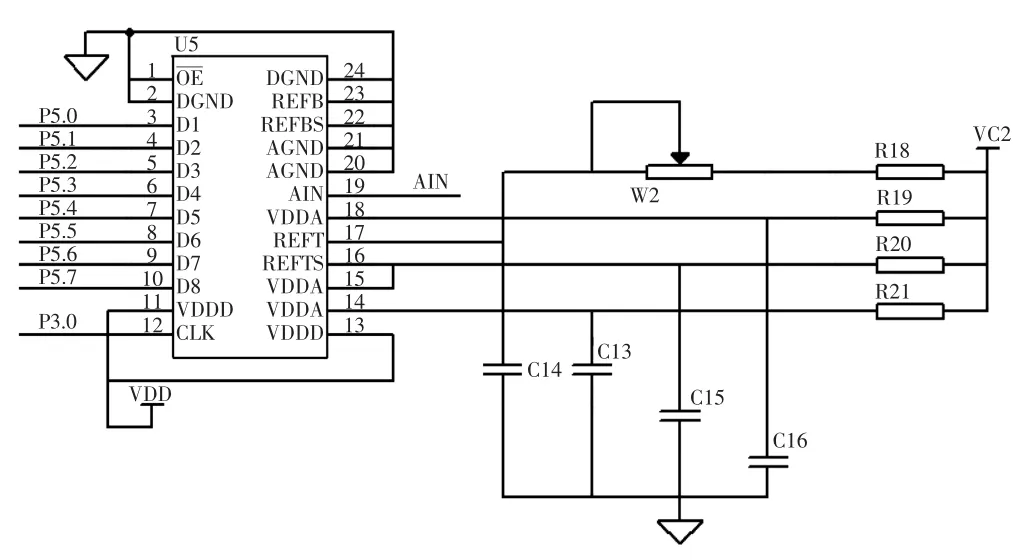
图4 信号A/D转换采集电路Fig.4 Signal A/D conversion and acquisition circuit
TLC5510是TI公司开发的8位高速A/D转换芯片,能提供的最小采样速率为20MSPS,在高速转换的同时保持较低的功耗.图4中,模拟信号通过引脚AIN采样,转换为8位数字信号(D1—D8),系统将转换后的信号读入主控芯片,然后进行温度补偿和互相关去噪等处理,计算出超声波渡越时间,从而分别计算出油、水的液位.在电路中,应将VDDA与AGND模拟信号部分和VDDD与DGND数字信号部分进行隔离,采用电容C13、C14、C15、C16去耦,参考信号REFT电压通过滑动变阻器W2来调节.
3 系统软件设计
系统软件程序主要包括主程序、回波发送及采集子程序、测温子程序、串口通信子程序等.主程序流程图如图5所示.其中,回波发射及采集子程序中采用定时器T0中断定时30 μs来避免测量盲区的影响;串口通信子程序采用查询方式实时发送数据到上位机.
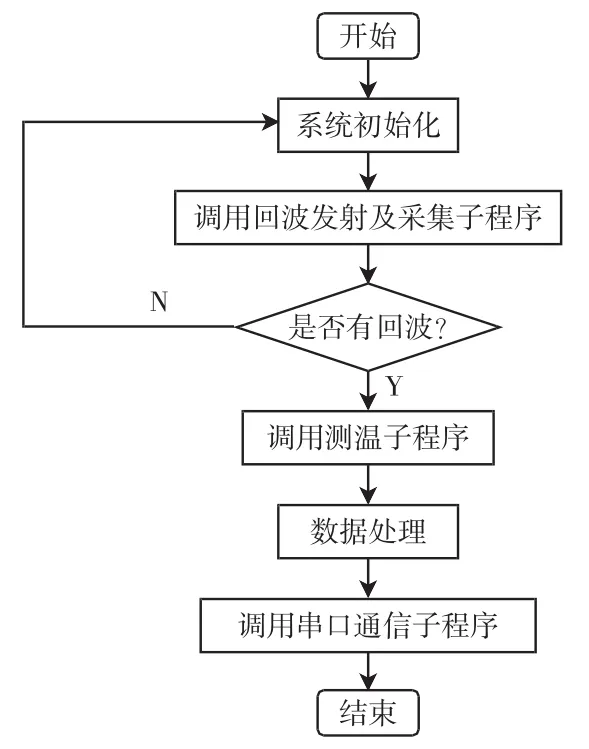
图5 主程序流程图Fig.5 Main program flow chart
4 回波信号处理
在多液位测量系统中,由于各种噪声干扰的存在,使得有用微弱信号很难区分出来.为了简化设计,提高回波信号的信噪比,利用互相关算法对信号进行滤波处理.同时,温度对超声波传播速度的影响,采用C8051F120的自带温度传感器进行测温补偿[10].
4.1 互相关检测滤波原理
对于2个随机信号之间的相关性,在时间域内,采用互相关函数来描述相关性.设x(t)和y(t)分别为来自各态历经的平稳随机过程的一个样本函数,它们之间的互相关Rxy(τ)定义为:

经过离散化处理后的固定长度的信号互相关函数为:

式中:N为采集信号的离散化的数据总数;Δ为数据采集间隔;Rxy(τ)计算量非常大,计算精度不是很高,如果需要更高的精度,应增加采集密度,减小采样间隔Δ.
互相关分析针对2个相类似的信号,这样才能够更好地从强噪声中提取有用的信号.信号互相关分析可以在固定长度看作信号的卷积,如图6所示.
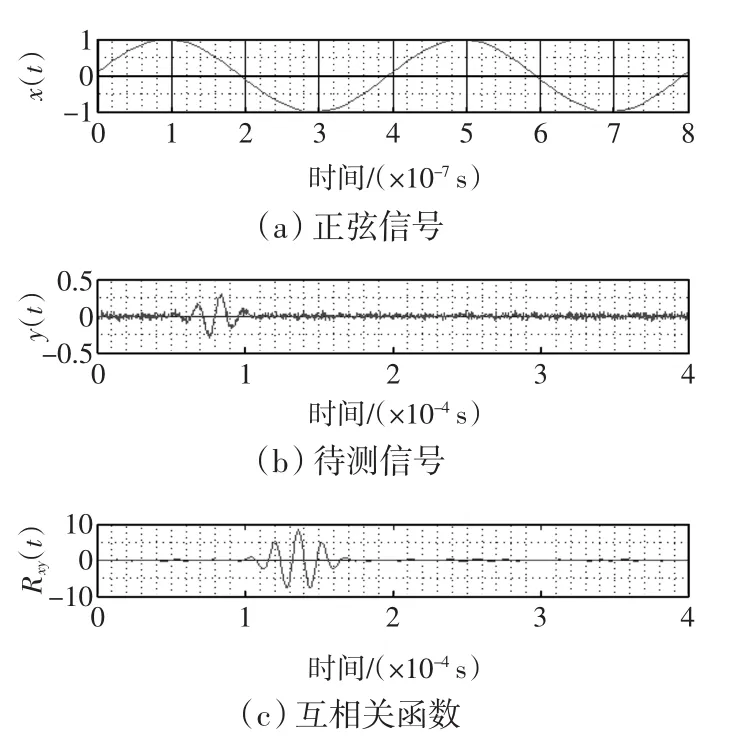
图6 信号互相关分析仿真Fig.6 Signal cross-correlation analyzing simulation
参考信号采用正弦信号:

待测信号y(t)采用超声波回波的高斯时域模型(传播过程中的信号延时、衰减、噪声干扰等已考虑在内):

式中:f0为探头的中心频率;τ为发射信号到达时间;α为带宽因子;反映回波脉冲带宽;β为幅值系数;φ为相位;回波特征值向量θ=[f0,τ,α,β,φ].时域模拟无法达到工业现场的要求,伴随着各种高频噪声干扰,所以通过加高斯白噪声来模拟.卷积的结果Rxy(t)存在极大值,此时所对应的时间为声波传播时间.
在实际的数据互相关处理过程中,采样频率至少要大于10倍的信号频率,积分区间范围应包括信号特征的90%以上[11].
4.2 回波信号互相关处理及结果
为了缩小开发周期,采用VB编程语言设计上位机超声波回波处理界面[12].其中,回波信号互相关处理部分是通过动态链接库DLL文件来实现在VB中直接调用Matlab自带的互相关信号处理函数.
根据回波波形参考信号仍选择正弦信号,待测信号则为实际采集的回波信号.根据参考信号单周期的采集点数的不同,所得到互相关波形也不同,参考信号的选取对去除噪声有很大的影响,甚至达不到去除噪声的作用.由于超声波中心频率为1 MHz,故采样频率至少选择为10 MHz,即一个周期内采集10个点.如图7所示.
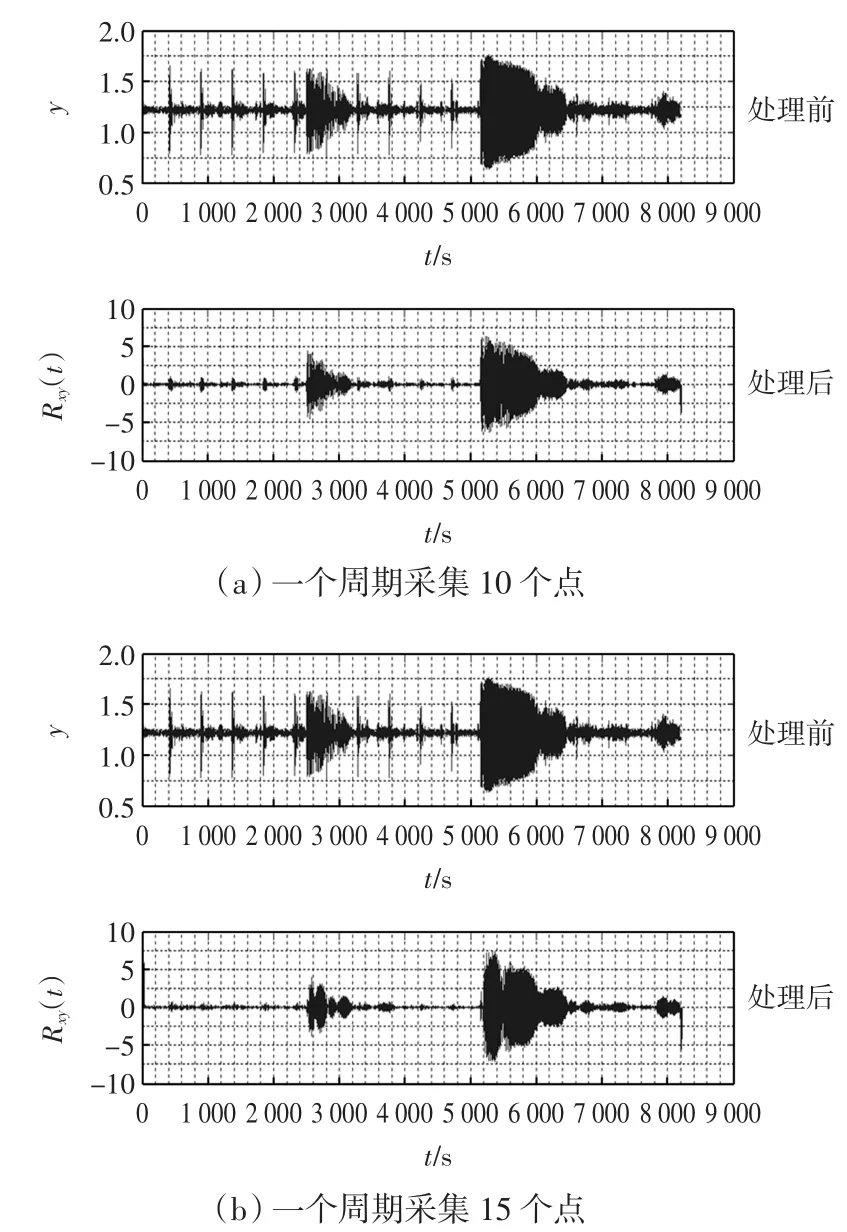
图7 超声波回波互相关波形图Fig.7 Cross-correlation waveform chart of ultrasonic echo
图7(a)、(b)分别为一个周期采集10个点、15个点时超声波回波互相关处理前后的波形图.由图7可知,一个周期采集15个点时能更好地去除干扰噪声,从而分辨出超声波回波信号的信息.为了控制参考信号的周期数和采集点数,在VB界面上采用按钮控件形式来设置它.
5 测量结果分析
实际的密闭容器高度大概1 m,测试选取2组不同水、油液位,测量结果如表1所示.

表1 测量结果Tab.1 Measuring results
由表1中数据可知,该液位测量系统的测量相对误差在1%左右.这是由于印刷电路板制作工艺以及系统延时的精确补偿还是存在一定的误差;另外,由于采用的是自收自发式探头,存在一定的盲区(0.2 m)干扰,本系统采取延时采集回波的方法来减小发射信号余振的影响.要进一步减小测量盲区,则需通过控制发射功率和尾波信号宽度等措施来减少[13].
6 结语
针对密闭罐内两相液位的测量,主要是通过C8051F120单片机完成对超声波探头的驱动和回波信号的采集.为了提高系统测量精度,不仅采用了自动增益补偿和温度补偿措施,而且将互相关算法应用到回波信号的处理中,并在软件上通过VB界面调用MATLAB动态链接库来具体实现,简化了硬件电路的设计.两组各3次的实验结果表明,水油的测量相对误差最高分别为1.4%、1.364%.要满足精度要求非常高的工业现场的需求,还需进一步改善.对于原油储罐等具有复杂多介质的情况,本系统的设计原理同样适用.
[1]张记龙,陕云凌.密闭容器非接触式超声波液位测量仪的研究[J].压电与声光,2009,31(3):366-369.
[2]曲浩琳.原油储罐内多相界面测量系统应用研究[D].西安:西安石油大学,2014.
[3]于玮,陈毅华,封维忠,等.无线超声波液位测量系统的设计[J].工矿自动化,2012(2):98-102
[4]ZHANG Minjuan,LI Shiwei.A method of the untouched ultrasonic liquid level measurement with high precision[C]//ICCASM 2010-2010 International Conference on Computer Application and System Modeling,Proceedings.[s.l.]:IEEE Computer Society,2010:7144-7147.
[5]陈建,孙晓颖,林琳,等.基于单周期互相关滤波的超声波TOF检测方法[J].仪器仪表学报,2014,35(3):664-669.
[6]彭映成,钱海,黎小毛,等.基于时间互相关的超声测距信号获取方法[J].仪表技术与传感器,2014(6):126-127,130.
[7]QUERIO R,ALEGRIA F C,GIRAO P S.Cross-correlation and sine-fitting techniques for high-resolution ultrasonic ranging[J]. IEEETransactions on Instrumentation and Measurement,2010,59(12):3227-3236.
[8]谢建.超声液位测量仪的研究 [J].自动化仪表,2002,23(2):12-15.
[9]曾祥进,王敏,黄心汉.自动增益电路在超声波测距系统中的应用研究[J].测控技术,2005(7):69-71.
[10]夏继强,郑昆,郑健峰,等.基于STM32的收发一体式超声波测距系统[J].仪表技术与传感器,2014(8):43-45,52.
[11]王萍,万柏坤,程烨.精确的互相关算法在超声波流速测量中的应用[J].传感器与微系统,2007,26(9):107-108.
[12]卢超.基于无线收发的超声波液位测量仪[J].压电与声光,2014,36(1):150-154.
[13]马志敏,刘珍秧,刘爱东,等.一种自动抑制超声测量盲区的方法[J].声学技术,2005,24(1):55-57.
Level detection of two-phase liquid in sealed container
WANG Ping1,LIU Yao1,WAN Kai2
(1 School of Electrical Engineering and Automation,Tianjin Polytechnic University,Tianjin 300387,China;2 School of Information Science and Technology,Sun Yat-sen University,Guangzhou 510006,China)
Liquid level of oil and water in sealed container as detecting object,an ultrasonic level measurement system based on the cross-correlation algorithm is designed.Taking C8051F120 as control kernel,the hardware architecture is mainly composed of ultrasonic transmitting and receiving circuit,weak echo signal conditioning circuit and so on.The echo signal is extracted from strong noise by cross-correlation algorithm.Oil and water level are measured through calculating time of flight in accordance with the peak of cross-correlated function.In the upper computer,the dynamic link library of Matlab is called by Visual Basic interface to realize the pocessing of noise interference and improve the recognition rate of useful signal.The experimental results show that the measurement accuracy of the system can be controlled at around 1%,and the system has the characteristics of simple realization,high stability,good repeatablity,etc.
sealed container;ultrasonic;multi-medium level measuring;cross-correlation algorithm
TP216
A
1671-024X(2015)05-0076-05
10.3969/j.issn.1671-024x.2015.05.016
2015-06-09
国家自然科学基金面上项目(61372011)
王 萍(1961—),女,教授,硕士生导师,主要研究方向为自动检测、计算机控制理论及应用.E-mail:wangping@tjpu.edu.cn
猜你喜欢
石油工业技术监督(2022年7期)2022-08-18
劳动保护(2019年3期)2019-05-16
小天使·六年级语数英综合(2018年10期)2018-10-15
电子制作(2018年17期)2018-09-28
军事文摘·科学少年(2016年7期)2016-09-20
电子制作(2016年21期)2016-05-17
汽车维护与修理(2015年2期)2015-02-28
噪声与振动控制(2015年4期)2015-01-01
振动、测试与诊断(2014年4期)2014-03-01
自动化博览(2014年12期)2014-02-28
