
CCD连续转移技术研究
2015-03-12 10:27董龙梁楠
航天返回与遥感 2015年3期
董龙 梁楠
(北京空间机电研究所,北京 100094)
0 引言
在高分辨率对地成像时,为了减小系统相对孔径,提高像面能量,通常采用 TDICCD或采用面阵CCD工作在TDI模式下,这就要求电荷转移速度与地面景物移动速度同步。但是这种同步是一种相对的同步。在垂直驱动信号作用下,在极短的时间内电荷在 CCD中从一个像元转移到另一个像元,而与其对应的地面景物却是连续地从上一个像元转移到下一个像元。这就造成了局部的不同步,会造成系统调制传递函数(MTF)下降,即系统的动态MTFv要远远低于静态MTFs[1],如图1所示。图中归一化空间频率指图像的空间频率f与其奈奎斯特频率fN的比值f/fN。

图1 动态MTFv与静态MTFs比较Fig.1 The comparison between dynamic MTF and static MTF
这种地面景物在焦面的像的移动与光生电荷移动的不匹配称为像移,为了解决 MTFv的损失,通常采用光学像移补偿、机械像移补偿和电子像移补偿[2-3]。CCD连续转移模式属于电子像移补偿的一种,该方法能够在不增加系统体积、质量和功耗的情况下提高相机的 MTFv,因此成为像移补偿的一种理想方法。但是目前对连续转移模式的研究都集中在理论和方法[4-6]上,对其在工程应用中产生的串扰问题及其解决方法却没有研究。本文针对 CCD工作在连续转移模式时对图像的影响进行研究,提出硬件和软件相结合的方法消除串扰,解决了工程应用中出现的问题,提高了图像品质。
1 连续转移和突发转移对MTF影响分析
CCD垂直转移方式分为突发转移模式和连续转移模式,目前常用的是突发转移模式,指电荷从一个像元迅速转移到下一个像元,其驱动时序如图2所示(以下分析均以四相转移为例):

图2 突发转移模式时序Fig.2 Timing diagram of abrupt transfer mode
图2中CI1-CI4为CCD驱动信号时序,CCD工作时从t1时刻到t2时刻的T'′时间内,该势阱内的电荷将迅速转移到下一个像元中,而T'′时间占整个行周期T的比例较小,从而造成的像移为(T-T'′)/T,约为1个像元[4]。
连续转移模式是指,根据垂直转移相数,均匀地在各相中转移,从一个像元转移到另一个像元要分成均匀4步(三相转移CCD则分为3步)。

图3 连续转移模式时序Fig.3 Timing diagram of sequential transfer mode
图3中CI1~CI4为CCD驱动信号时序,CCD内的电荷从一个像元转移到另一个像元的时间T'′占行周期T的,从而使像移减小到像元。
CCD在运动方向造成的动态MTF降低用公式可以表示为[1]

式中 MTFv为运动方向的MTF;f为图像的空间频率;s为像移长度;vi为像移速度;t为积分时间。
当采用突发转移模式时,垂直转移时间较短,因此可近似的认为此时的像移为1个像元,而连续转移模式根据转移相数的不同而不同,其中三相转移的像移为1/3个像元,四相转移的像移为1/4个像元。根据式(1)计算得到的不同方式在耐奎斯特频率处的MTFv如图4所示:
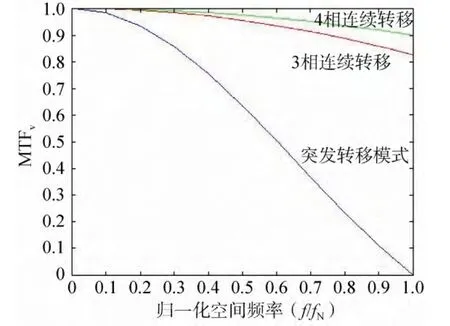
图4 不同模式下MTFv对比Fig.4 The contrast of MTFv between different modes
从图4中可以看到,突发转移模式在耐奎斯特频率处的动态MTFv=0,三相连续转移的MTFv=0.827,四相连续转移的MTFv=0.900 3,因此采用连续转移模式可以有效提高系统动态MTF。
2 连续转移对成像的影响
连续转移模式可有效提高相机运动方向的 MTF,但由于频率的原因,连续转移模式的上升/下降沿必然会落在CCD水平转移时间内,以四相转移为例,如图5(a)所示:
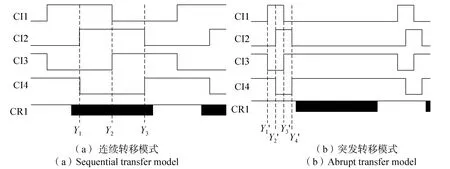
图5 CCD驱动时序Fig.5 Timing of CCD driver
其中,CI1~CI4为垂直转移时钟;CR1为水平转移时钟,黑色位置为水平转移时序工作段。在突发转移时,垂直转移时钟的上升/下降沿(Y1'、Y2'、Y3'、Y4')处于CR1的空闲时间段内,如图5(b)所示。在连续转移时,如前面所述,由于时序的特殊性,垂直转移的上升/下降沿必然会处于水平转移工作时间内,如图5(a)中Y1、Y2、Y3时刻,垂直转移跳变沿与水平转移工作重合。由于CCD内部电极耦合的因素,这些上升/下降沿会在水平转移信号的对应像元产生毛刺,反映到图像上就是亮/暗线,如图 6所示。
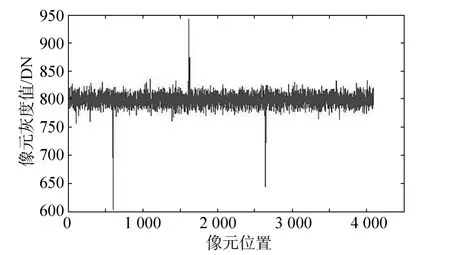
图6 连续转移模式时的串扰Fig.6 Crosstalk caused by sequential transfer mode
根据实验测试,这些串扰位置与垂直转移时的上升/下降沿位置完全对应,并且对于固定电路,串扰的大小不随输入光强的变化而变化。
3 消除连续转移串扰的方法
根据连续转移串扰的特点,消除这种串扰分为硬件和软件两种方法。
硬件消除的方式指对CCD垂直转移驱动信号进行波形化处理,增加垂直转移信号的上升/下降沿时间。具体方法有两种:第一种方法是在垂直转移驱动电路的输出端与CCD输入管脚之间增加RC电路,其中电容(C)的选取要与CCD垂直转移信号的负载大小处于同一量级,如图7所示。

图7 RC电路示意图Fig.7 The circuit diagram of RC
第二种方法是采用数字控制方法,即采用编码和DA芯片产生类似梯形波或正弦波,如图8(a)所示的电路构架;通过时序控制器产生时序编码,经AD转换和信号驱动产生图8(b)所示的梯形波,或者图 8(c)所示的正弦波。这种数字编码方式可以延长上升/下降沿时间,实验室测试时将原上升/下降沿由原2μs延长到5μs,实测结果如图9所示,从而降低跳变沿时的驱动电流,降低串扰能量,减小串扰强度。

图8 数字波形化方法Fig.8 Digital timing of waveform

图9 硬件消除串扰结果Fig.9 The result of correcting crosstalk using hardware circuit
从图9中可以看到,垂直转移的串扰已经从原来的约180DN减小到50DN左右,进一步增加负载电容,可将串扰信号淹没在图像噪声中。但是,通过增加负载电容消除串扰时,也在多个像元产生了串扰,即串扰能量从原先的一个像元分散到了多个像元上,像元个数与驱动信号上升/下降沿时长一致,虽然串扰强度很小,但在高清晰度成像时,在图像中形成竖条。
软件消除的方式是指通过定标得到校正系数,通过软件校正实现,在实际操作中,将此串扰作为固定图像噪声,校正方式也相同。实验室验证结果如图10所示:

图10 软件校正前后对比Fig.10 The comparison between before and after correcting
从图10中可以看到,软件校正的结果非常理想,这是由于该噪声大小固定造成的。但是如果硬件电路发生变化,如器件老化,频率漂移等,软件校正就会失去效果,需要重新定标,对于在轨遥感器则无法实现。另外,软件校正会降低系统的动态范围,在图像较暗和近饱和区域时需要特殊处理。
4 结束语
CCD连续转移模式可有效提高系统运动方向上的动态 MTF,但同时会带来信号串扰的问题,在工程中采用硬件消除的方式简单易行,并且随着电路的变化始终有效,对系统的动态范围影响也较小,但是很难完全消除;采用软件校正的方式效果最好,但是会增加FPGA的资源开销,随着硬件电路的改变效果会减弱。因此在工程实际中建议两种方式同时采用,会达到更好的效果。
(
)
[1] 董龙. CCD成像建模及其仿真系统研究[D]. 北京: 中国空间技术研究院, 2008. DONG Long. Research of CCD Imaging Model and Simulation System[D]. Beijing: China Academy of Space Technology, 2008. (in Chinese)
[2] 张丽, 汤恩生, 许敬旺. 空间相机像移补偿方法研究[J]. 航天返回与遥感, 2007, 28(3): 19-22. ZHANG Li, TANG Ensheng, XU Jingwang. Studies on the Image Motion Compensation Methods of Space Camera[J]. Spacecraft Recovery & Remote Sensing, 2007, 28(3): 19-22. (in Chinese)
[3] 童子磊. CCD相机的像移补偿技术[J]. 激光与红外, 2005, 35(9): 628-632. TONG Zilei. Compensation Technology for the Image Motion of CCD Camera[J]. Laser & Infrared, 2005, 35(9): 628-632.(in Chinese)
[4] 王栋, 潘卫军, 李涛. 帧转移面阵CCD电子像移补偿设计[J]. 航天返回与遥感, 2009, 30(3): 42-49. WANG Dong, PAN Weijun, LI Tao. Design of Image Motion Compensation in Electronics of Frame Array CCD[J]. Spacecraft Recovery & Remote Sensing, 2009, 30(3): 42-49. (in Chinese)
[5] 李清军. 面阵CCD相机像移补偿技术[J]. 计算机测量与控制, 2008, 16(12): 1951-1953. LI Qingjun. IMC Technology of the Area Scan CCD Camera[J]. Computer Measurement & Control, 2008, 16(12): 1951-1953. (in Chinese)
[6] 丁福建, 李英才. CCD相机象移的补偿[J]. 光子学报, 1998, 27(10): 948-951. DING Fujian, LI Yingcai. Forward Motion Compensation of CCD Camera by Means of Computer Software[J]. Acta Photonica Sinica, 1998, 27(10): 948-951. (in Chinese)
[7] 庄绪霞, 王治乐, 阮宁娟, 等. 像移对星载TDICCD相机成像品质的影响分析[J]. 航天返回与遥感, 2013(6): 66-73. ZHUANG Xuxia, WANG Zhile, RUAN Ningjuan, et al. Influence Analysis of Image Motion on Image Quality of Satellite-board TDI Camera Optical System[J]. Spacecraft Recovery & Remote Sensing, 2013(6): 66-73. (in Chinese)
[8] 陶家生. 像移和采样共同作用下的TDICCD探测器像质[J]. 光电工程, 2005, 32(8): 52-55. TAO Jiasheng. Study on the Imaging Quality of TDICCD Sensor Under Image Motion and Sampling Effect[J]. OPTO-electronic Enineering, 2005, 32(8): 52-55. (in Chinese)
[9] 董龙, 李涛. 线阵CCD成像仿真研究[J]. 航天返回与遥感, 2008, 29(1): 43-49. DONG Long, LI Tao. Research of Line CCD Imaging Simulation[J]. Spacecraft Recovery & Remote Sensing, 2008, 29(1): 43-49. (in Chinese)
[10] 齐怀川, 黄巧林, 胡永力. 空间光学遥感运动模糊仿真方法研究[J]. 航天返回与遥感, 2010, 31(2): 51-56. QI Huaichuan, HUANG Qiaolin, HU Yongli. The Study about the Means of Simulation for the Motion Blurred of Space Optical Remote Sensing[J]. Spacecraft Recovery & Remote Sensing, 2010, 31(2): 51-56. (in Chinese)
[11] 李晓云, 杜伟. 星载TDICCD相机像移对成像质量的影响分析[J]. 航天器工程, 2011, 20(3): 51-55. LI Xiaoyun, DU Wei. Analysis of Image Motion Effect on Satellite TDICCD Camera Image Quality[J]. Spacecraft Engineering, 2011, 20(3): 51-55. (in Chinese)
[12] 张保贵, 张宇烽. 空间CCD相机辐射校正算法分析[J]. 航天返回与遥感, 2014, 35(1): 91-96. ZHANG Baogui, ZHANG Yufeng. Analysis of Relative Radiometric Calibration Algorithm of Space CCD Camera[J]. Spacecraft Recovery & Remote Sensing, 2014, 35(1): 91-96. (in Chinese)
[13] 成桂梅, 吴淞波, 李强, 等. 星载遥感CCD相机高性能时序发生器的研制[J]. 航天返回与遥感, 2014, 35(1): 46-53. CHENG Guimei, WU Songbo, LI Qiang, et al. Development of High-performance Timing Generator for Remote Sensing CCD Camera on Satellite[J]. Spacecraft Recovery & Remote Sensing, 2014, 35(1): 46-53. (in Chinese)
[14] 董龙, 李涛. 面阵CCD 时序抗弥散方法研究[J]. 航天返回与遥感, 2012, 33(6): 86-92. DONG Long, LI Tao. Research of Area CCD Clock Antiblooming Method[J]. Spacecraft Recovery & Remote Sensing, 2012, 33(6): 86-92.(in Chinese)
[15] 雷宁, 刘苗, 李涛. TDI CCD像元响应不一致性校正算法[J]. 光学技术, 2010, 36(1): 86-92. LEI Ning, LIU Miao, LI Tao. TDI CCD Non-uniformity Correction Algorithm[J]. Optical Technique, 2010, 36(1): 86-92.(in Chinese)
猜你喜欢
导航定位学报(2022年5期)2022-10-13
小猕猴智力画刊(2022年3期)2022-03-28
上海理工大学学报(2021年3期)2021-07-20
国学(2020年1期)2020-06-29
铁道建筑技术(2020年11期)2020-05-22
家庭影院技术(2018年11期)2019-01-21
电子制作(2017年13期)2017-12-15
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18
人生十六七(2016年14期)2016-12-01
