
一种星载激光测距仪姿态的确定方法及误差分析
2015-03-12 10:27:40邓永涛李旭颜凡江
航天返回与遥感 2015年3期
邓永涛 李旭 颜凡江
(北京空间机电研究所,北京 100094)
0 引言
卫星摄影测量立体测绘,一般是通过地面控制点和卫星遥感影像中的同名关系进行空中三角测量来获取地面的三维信息[1]。进行空中三角测量时,首先根据地面控制点对卫星进行在轨检校,标定卫星成像时的内外方位元素,再依据影像内外方位元素和和影像中的同名关系,利用前方交会计算得到地面点的坐标,从而获得地物空间信息[2]。由于地面控制点获取困难,少控或无控测图成为卫星摄影测量的发展趋势[3-5]。对传输型测绘卫星而言,要实现全球无地面控制点1︰10 000卫星摄影测量,需要测绘卫星达到高程1.6m、平面3m的定位精度要求,难度较大,国际上也无可供跟踪和参考的卫星工程[4-6]。在目前技术条件下,单靠两线阵或三线阵相机直接前方交会定位已经不能满足1︰10 000比例尺测图的高程精度要求[2],为此有学者提出双线阵相机+激光测距仪的组合方案[7-10]。星载激光测距仪的定位原理与立体相机前方交会不同,是利用激光测距仪来改进摄影光束的交会定位精度。星载激光测距仪通过向地球表面发射、并接收经地面反射后的激光脉冲信号,由往返信号的时间延迟计算出卫星到地面点的距离,再根据卫星的位置和飞行姿态,计算出地面点的坐标,从而得到目标的高程信息[11]。
根据文献[7-8]可知,在双线阵相机的前方交会定位中,影像外方位元素尤其角元素是定位的主要误差源。对于轨道高度超过500km的测绘卫星,1"的角元素误差即可造成3m以上的高程误差,这对于大比例测图要求而言是不能接受的。与之相比,激光测距定位中,外方位角元素对高程坐标的误差传播系数仅为其几十分之一,激光测距对地高程误差主要受测距精度的影响,且其误差传播系数较小。因此,在辅助定向数据精度不变的情况下即可显著改进地面目标点的高程精度。利用激光测距仪辅助立体相机实现全球大比例尺无控测图成为卫星摄影测量的发展趋势。
为实现中国1︰10 000立体测绘卫星工程,2007年北京空间机电研究所等单位推出了分辨率为0.6m的两线阵CCD相机方案,并配有测角精度优于角秒级的星相机和测距精度优于1m的激光测距仪[4]。星载激光测距仪平面定位精度和高程精度误差源不同,高程精度主要与测距精度有关,而平面定位精度主要受姿态角的观测精度影响,且影响平面定位精度的误差源对应的误差传播系数远大于影响高程精度的误差源的传播系数[12-15]。因此,为满足地面目标定位精度的要求,必须提高激光测距仪的姿态确定精度。根据1︰10 000卫星摄影测量3m的平面定位精度要求,可以计算出姿态角确定误差需要优于0.875″。在常规遥感卫星中通常把姿态测量敏感器(星敏和惯性设备)的姿态确定精度作为遥感探测的指向精度,但对高精度测绘卫星而言,在轨环境下,由于受温度场、重力场等因素的影响,姿态测量敏感器(星敏和惯性设备)和激光测距仪光轴之间存在夹角不稳定的随机误差,且激光器自身也存在出射激光光轴抖动误差。为解决此问题,本文提出一种基于足印相机和地相机图像联合处理对激光测距仪姿态角进行高精度确定的方法,并对确定误差进行分析。
1 激光测距仪姿态确定算法
为精确确定激光测距仪的姿态指向,给其配备了足印记录相机,通过足印记录相机分别获取星下点的地物图像和激光光斑图像,并通过光斑质心提取算法获得地面激光光斑在足印记录相机图像中的具体位置,进而获知激光发射光轴与足印相机光轴之间的关系。将通过足印记录相机获取的包含激光光斑位置的地物图像与后视地相机获取的地物图像进行特征匹配,进而确定激光光斑在后视地相机中的精确位置,这样就确定了激光发射光轴与后视地相机光轴的相对关系,也间接确定了激光测距仪每个测距时刻的姿态角,其光轴关联如图1所示,图中“O”为图像特征匹配点;“+”为地面激光光斑定位点。

图1 后视地相机和足印相机光轴示意Fig.1 The diagram of rear view camera and footprint camera optical axis connection
根据测绘相机系统的位置和姿态数据、足印相机和后视地相机的内方位元素标定数据、后视地相机和测绘相机系统坐标系间夹角的标定数据以及后视地相机和激光测距仪足印记录相机的两幅足印图像,将这些参数联立为方程组,解此方程组即可得到激光发射光轴与后视地相机光轴之间的夹角。
采用的运算步骤如下:
1)对足印记录相机获取的地表图像和激光光斑图像进行处理,按照质心提取算法,对足印记录相机记录的激光光斑进行质心位置提取,并在足印记录相机获取的地表图像中用“十”字符号进行标识,便于后续处理。
2)利用后视地相机获取地球表面同一区域的高分辨率图像,如图1所示。
3)分别对两张地表图像进行处理,获得相同比例尺的图像数据,并对处理得到的数据分别进行特征点选取,利用选取的特征点进行图像匹配,确保匹配误差不超过 0.1个像素;并将代表激光光斑位置的“十”字符号分别在处理的图像中进行标识。
4)从图像中获取图像的行编号和列编号,并显示代表激光光斑位置的中心,如图2所示。
5)按照各行编号,使用辅助数据确定激光足印的拍摄时刻t1和t2,根据这些时刻可得到测绘系统的位置坐标(X1, Y1, Z1)、(X2, Y2, Z2)以及测绘系统的姿态角(φ1, ω1, κ1)和(φ2, ω2, κ2)。为简化描述,本文只对轨道面内的二维情况进行分析,在计算中采用了坐标(X1, Z1)、(X2, Z2)和角(φ1, φ2) ,如图1所示。
6)根据辅助数据确定O1到地球表面同名点的距离L,该距离由激光测距仪在时刻t1测量得到。
7)按照列编号,使用后视地相机和激光测距仪足印记录相机内方位元素标定数据,找到每台相机的坐标系中同名点的观测角βОМ和βММ,如图2、3所示。
8)根据测绘相机系统的地面标定数据,取后视地相机视轴和测绘相机系统坐标系间的夹角为γО。

10)按坐标轴分解矢量分量后,由式(1)可得:

11)解式(2)可得

12)将 ω1=φ1+ γM+ βMM、ω2= φ2+ γO+ βOM代入式(3)可得

式中 Δφ为两个拍摄位置上姿态角相对变化, Δφ= φ1- φ2。
图2中,WGS地心坐标系为1984年世界大地坐标系,ZWGS为大地坐标系的Z轴方向;M点为地面激光光斑位置;ZOM为后视地相机的视轴指向;ZMM为足印记录相机的视轴指向。
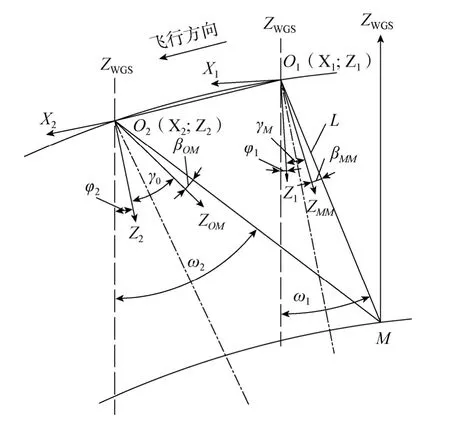
图2 同名点拍摄示意Fig.2 The observation diagram of corresponding point

图3 同名点观测角示意Fig.3 The observation angle diagram of corresponding point
2 激光测距仪姿态确定误差分析
根据上节确定的夹角计算模型,对激光测距仪相对于测绘相机系统的姿态确定误差进行分析。γM的确定误差评估见表1。
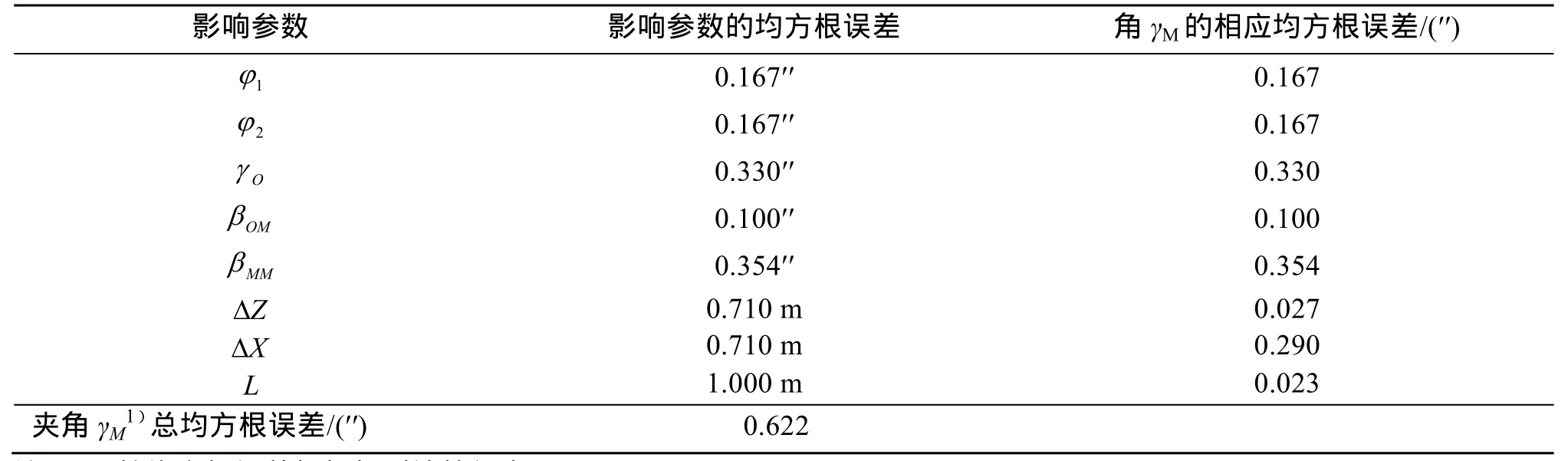
表1 夹角的确定均方根误差Tab.1 The table of angle error(RMS)
进行误差分析时所选取的模拟数据参照文献[4],其中:两线阵相机中前视相机与垂直方向夹角为26°,后视相机与垂直方向夹角为–5°,卫星飞行高度为500km,基高比为0.6,地面像元分辨率为0.6m,航线宽为42km,后视地相机焦距为5 855mm,焦距测量均方根误差不大于15μm,畸变测量均方根误差不大于3μm;激光测距误差为1m,中心激光束垂直对地,其他两个激光束与中心夹角为2°;足印相机焦距为382mm,焦距测量均方根误差不大于5μm,足印相机畸变测量均方根误差不大于1μm;卫星稳定度为5×10–4(°)/s,在以地球为中心的坐标系WGS-84中,通过差分GPS确定的卫星外方位线元素误差经地面处理后不超过 0.5m(1σ),采用两台星相机确定的俯仰方向角度变化量测量误差为 0.5″(3σ);在惯性坐标系下,地相机三轴指向确定误差应不超过1″(3σ)。
表1中各项误差计算时取:
1)激光测距仪视轴指向近天底方向,因此测绘相机系统坐标系姿态角1φ在时刻t1约为0°,借助星相机对姿态角φ进行测量,星相机在俯仰方向角度变化量测量误差为0.5″(3σ),则姿态角φ的均方根误差σφ=0.167″。
2) γO=5°,在惯性坐标系下,地相机三轴指向确定误差应不超过 1″(3σ),则后视地相机视轴确定均方根误差σγo=0.33′。
3)对于后视地相机,观测角βОМ较小,因此同名点图像靠近线阵主点。畸变测量误差和地相机内方位元素测量误差引起的均方根误差σβОМ≤0.1′。
4)对于激光测距仪足印相机成像系统,观测角βММ同样较小,均方根误差σβMM≤0.354′;
5)两个拍摄系统拍摄同名点的时间间隔约为3.7s。拍摄期间坐标Z的变化量ΔZ=–58m,坐标X的变化量ΔX =–28 310m。
6)通过GPS和后续的地面处理,确定测绘相机系统坐标的均方根误差不超过0.5m。因此测量ΔX、ΔZ值的均方根误差σΔXΔZ不会超过0.71m。
7)激光测距仪测量的距离L=500 305m,均方根误差σL=1m。
3 结束语
1)由以上分析可知,本文提出的采用足印记录相机、地相机图像联合处理技术,能够解决激光测距仪姿态角和激光指向高精度确定问题,并且所确定的夹角均方根误差σ≤0.622″,满足1︰10 000比例尺的定位精度要求;
2)本文提出的精确确定系统坐标系和激光测距仪之间夹角的算法,可以使激光测距仪在一圈工作期间与系统坐标系的夹角稳定性要求大幅降低,使激光测距仪不用和地相机硬关联,降低了系统的研制难度;
3)本文分析的姿态误差为随机误差,由于系统在 15min的工作时间内该夹角相对稳定,使用基于二次多项式的最小二乘法进行平滑拟合处理后,该误差还能进一步降低。
(
)
[1] 王之卓. 摄影测量原理[M]. 北京: 测绘出版社, 1979. WANG Zhizhuo. The Principle of Photogrammetry[M]. Beijing: Surveying and Mapping Press. (in Chinese)
[2] 岳春宇, 郑永超, 陶宇亮. 星载激光测高仪辅助卫星摄影测量浅析[J]. 航天返回与遥感, 2013, 34(4): 71-76. YUE Chunyu, ZHENG Yongchao, TAO Yuliang. Study on Space-borne Laser Altimeter Supported Satellite Photogrammetry[J]. Spacecraft Recovery & Remote Sensing, 2013, 34(4): 71-76. (in Chinese)
[3] 王任享. 中国无地面控制点摄影测量卫星追述(一)——返回式摄影测量卫星[J]. 航天返回与遥感, 2014, 35(1): 1- 5. WANG Renxiang. Chinese Photogrammetry Satellite without Ground Control Points(1)-Recoverable Photogrammetry Satellite[J]. Spacecraft Recovery & Remote Sensing, 2014, 35(1): 1-5. (in Chinese)
[4] 王任享. 中国无地面控制点摄影测量卫星追述(二)——1︰10 000传输型摄影测量卫星技术思考[J]. 航天返回与遥感, 2014, 35(2): 1- 5. WANG Renxiang. Chinese Photogrammetry Satellite without Ground Control Points(2)-Technical Thinking of 1︰10 000 Scale Data-transferring Photogrammetry Satellite[J]. Spacecraft Recovery & Remote Sensing, 2014, 35(2): 1-5. (in Chinese)
[5] 王任享. 我国无地面控制点卫星摄影测量综述[J]. 海洋测绘, 2008, 8(5):1-8. WANG Renxiang. The Review of Photogrammetry without Control Point in Our Country[J]. Marine Surveying and Mapping, 2008, 8(5): 1-8. (in Chinese)
[6] Light D L. Characteristics of Remote Sensors for Mapping and Earth Science Applications[J]. Photogrammetric Engineering & Remote Sensing, 1990, 56(12): 1613-1623.
[7] 岳春宇, 何红艳, 鲍云飞, 等. 星载激光高度计几何定位误差传播及分析[J]. 航天返回与遥感, 2014, 35(2): 81- 86. YUE Chunyu, HE Hongyan, BAO Yunfei, et al. Study on Error Propagation of Space-borne Laser Altimeter Ground Positioning[J]. Spacecraft Recovery & Remote Sensing, 2014, 35(2): 81-86. (in Chinese)
[8] 余俊鹏, 孙世君. 卫星摄影测量观测技术发展的若干思路[C]. 第二十三届全国空间探测学术交流会. 厦门, 2010: 1-6. YU Junpeng, SUN Shijun. Some Strategies about Satellite Photogrammetry[C]. The 23rd National Conference on Space Explorer. Xiamen, 2010: 1-6. (in Chinese)
[9] Wehr A, Lohr U. Airborne Laser Scanning an Introduction and Overview[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 1999, 54(2): 68-82.
[10] Baltsavias E P. Airborne Laser Scanning: Existing Systems and Firms and Other Resourses[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 1999, 54(2): 164-198.
[11] 李磊, 郑永超, 彭凤超, 等. 地形测绘激光成像雷达技术研究[J]. 红外与激光工程, 2006, 35(增刊): 294- 298. LI Lei, ZHENG Yongchao, PENG Fengchao, et al. Research of Three-dimension Imaging Radar on Land Topography[J]. Infrared and Laser Engineering, 2006, 35(Supplement): 294-298. (in Chinese)
[12] 唐新明. 资源三号测绘卫星三线阵成像几何模型构建与精度初步验证[J]. 测绘学报, 2012, 41(2): 191-198. TANG Xinming. Triple Linear-array Imaging Geometry Model of ZY-3 Mapping Satellite and Its Validation[J]. Acta Geodaeticaet Cartographica Sinica, 2012, 41(2): 191-198. (in Chinese)
[13] 余俊鹏, 孙世君, 毛建杰. 卫星遥感影像外方位元素的误差传播研究[J]. 航天返回与遥感, 2011, 32(1): 18-23. YU Junpeng, SUN Shijun, MAO Jianjie. Study on Error Propagation of Exterior Orientation Elements of Satellite Remote Sensing Imagery[J]. Spacecraft Recovery & Remote Sensing, 2011, 32(1): 18-23. (in Chinese)
[14] 范春波, 李建成, 王丹, 等. ICESAT/GLAS激光脚点定位及误差分析[J]. 大地测量与地球动力学, 2007, 27(1): 104-106. FAN Chunbo, LI Jiancheng, WANG Dan, et al. ICEsat/GLAS Laser Footprint Geolocation and Error Analysis[J]. Journal of Geodesy and Geodynamic, 2007, 27(1): 104-106. (in Chinese)
[15] Sungkoo B, Charles W, Bob S. GLAS PAD Calibration Using Laser Reference Sensor Data[C]. In AIAA/AAS Astrodynamics Specialist Conference and Exhibit. Providence, RI, USA, 2004: 1-10.
猜你喜欢
南方农机(2023年15期)2023-07-21 10:36:48
中学生数理化·七年级数学人教版(2023年3期)2023-03-21 00:44:56
——黄咏梅小说论
扬子江评论(2022年6期)2022-08-15 00:52:39
矿山测量(2020年3期)2020-07-15 07:19:12
汽车维修技师(2019年3期)2019-08-07 08:56:32
测控技术(2018年12期)2018-11-25 09:37:26
自动化学报(2017年2期)2017-04-04 05:14:28
价值工程(2017年8期)2017-03-25 10:16:21
卷宗(2017年1期)2017-03-17 09:14:36
科技视界(2016年16期)2016-06-29 20:57:07
