高动态下惯性加速度辅助三阶锁相环性能分析
2015-03-11 05:15李育龙左启耀
导航定位与授时 2015年3期
李育龙,左启耀,李 峰
(北京自动化控制设备研究所,北京 100074)
高动态下惯性加速度辅助三阶锁相环性能分析
李育龙,左启耀,李 峰
(北京自动化控制设备研究所,北京 100074)
针对高阶跟踪环路稳定性比低阶环路差,大带宽带来测量误差大的问题。研究在高动态环境下,惯导加速度信息辅助卫星接收机三阶载波锁相环跟踪算法,以及不同环路参数下跟踪环路的性能。对载体高动态场景、加速度信息延迟进行建模,并对算法进行了数学仿真。仿真分析结果表明,在加速度信息辅助下,即使压缩载波跟踪环路等效噪声带宽到3Hz,在高达1200g/s的加速度动态下,环路跟踪同样稳定可靠。
高动态;加速度;锁相环;惯性辅助
0 引言
卫星接收机常用锁相环和锁频环实现对卫星信号的稳定跟踪,由于锁相环具有更高的跟踪精度,因此卫星接收机一般先用锁频环牵引,减小跟踪多普勒频率误差,之后转为采用纯锁相环对信号进行跟踪。
尽管锁相环具有更高的跟踪精度,然而锁相环的动态性能不如锁频环,锁相环为了稳定跟踪高动态信号,需要采用较大的带宽。但是增大带宽势必引入更多的热噪声,降低了环路的跟踪性能;同时锁相环在高动态环境下,容易发生相位失锁或相位翻转等现象。所以锁相环和锁频环跟踪高动态信号性能都存在不足。
利用惯性信息对载波跟踪环进行辅助是一种提高接收机高动态环境适应性的有效手段[1]。依靠惯性导航系统(INS)的测量信息对于接收机跟踪环路的辅助,跟踪环路中大部分动态应力被消除。在采用锁相环对信号进行跟踪时,不用放大带宽,即可实现对高动态信号的跟踪,同时还不降低跟踪性能。惯性信息辅助跟踪环路属于惯性/卫星深组合技术范畴,同样有助于组合导航系统性能提高。
国内外很多文献针对惯性信息辅助二阶锁相环路进行了研究。文献[1]分析了惯性信息辅助二阶锁相环的环路跟踪性能;文献[2]研究了如何通过INS的加速度信息计算多普勒变化率,以辅助GPS载波环,提高GPS接收机的跟踪性能;文献[3]分析了GPS/INS不同层次的组合结构,给出了多普勒频移和时钟误差频率的外部估计方法,提出了一种基于跟踪环的GPS/INS深组合方法,即通过外部或INS信息来调整载波频率,从而减少甚至消除动态应力的影响,同时减小环路带宽,提高抗干扰性能。
对于组合导航系统,惯性信息的处理、传输必定会产生延时,达不到实时辅助跟踪环路的期望,导致环路中的动态应力不能完全抵消跟踪环路需要跟踪残余的动态应力。通常三阶锁相环比二阶锁相环具有更好的动态跟踪性能,所以惯性信息辅助跟踪环路方案中,采用三阶锁相环更适合于残余动态应力的跟踪。本文研究了惯性加速度信息辅助三阶载波锁相环的数学模型,针对严酷的动态环境,及不同的加速度信息辅助时延,就辅助下环路的跟踪稳定性进行仿真分析,并给出了环路关键参数的最优取值。
1 卫星接收机跟踪环路
卫星接收机主要有码环和载波环两个跟踪环路。其中码环具有一定的鲁棒性,不易失锁,在采用载波辅助伪码方法后,主要靠载波环对接收机高速运动引起的动态进行跟踪,为了提高跟踪精度,在跟踪稳定后,采用纯锁相环进行跟踪。

图1 锁相环的基本构成Fig.1 The basic structure of the phase locked loop
典型的锁相环主要由鉴相器、环路滤波器和压控振荡器三部分组成[5],如图1所示。输入信号ui(t)与输出信号uo(t)进行鉴相,得到鉴相误差ud(t),鉴相误差经环路滤波器滤波后得到滤波结果uf(t),根据滤波结果uf(t)调节压控振荡器,使得输出信号uo(t)保持对输入信号ui(t)稳定跟踪。
图2描述了整个锁相环在拉氏变换域的函数传递关系。其中θi(s)与θo(s)分别作为系统的输入与输出,Kd为鉴相器增益,包含环路滤波器增益Kf在内的环路滤波器的传递函数为F(s),压控振荡器增益为Ko,锁相环系统传递函数H(s)为
(1)
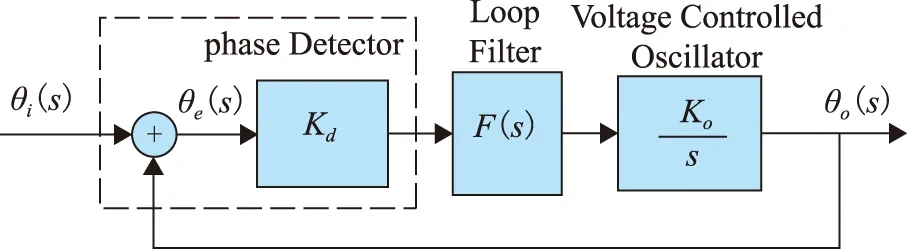
图2 锁相环s域模型Fig.2 The model of the phase locked loop

图3 三阶锁相环滤波器Fig.3 The loop filter of the third order PLL
从锁相环系统传递函数可以看出,环路滤波器F(s)基本上决定了锁相环的性能,可见环路滤波器设计的重要性。锁相环按阶数来分主要有一阶、二阶和三阶锁相环,阶数更高的锁相环不太稳定,参数比较难以设计。三阶锁相环的环路滤波器结构如图3所示,K为环路增益,ωn为特征频率,a3、b3为滤波器系数,a3=1.1,b3=2.4,滤波器的传递函数为
(2)
将式(2)带入式(1)可得三阶锁相环系统传递函数为
(3)
锁相环带宽BL=0.7845ωn,锁相环为了跟踪大的动态应力,通常需要较大的带宽,越大的带宽引入的噪声越多,使相位测量精度变差,所以高动态跟踪与高测量精度是矛盾的关系。通过惯性信息辅助,在跟踪高动态信号时,大部分动态应力已被消除掉,环路不存在大动态跟踪的问题,此时可以减小环路滤波器带宽,提高测量精度,有效解决上述矛盾。
2 基于惯导加速度辅助跟踪环路算法
有两种惯性信息可用于辅助载波跟踪环路,一种是多普勒频率信息,另一种是加速度信息。加速度信息一般精度在10E-4量级左右,加速度信息经积分处理可以得到载体速度,根据载体速度和载体相对卫星的位置,可以计算出多普勒频率信息。由于加速度信息精度很高,且比多普勒频率信息的实时性要好,本文重点研究加速度信息辅助跟踪环路算法。
利用惯性加速度信息辅助三阶锁相环的原理,直接用加速度信息辅助跟踪环路,加速度信息通过无源低通滤波器后,直接与三阶锁相环的第一级积分器输出相加,再经下一级积分器后,输出信息直接控制压控振荡器输出特定频率载波信号。如图4所示。

图4 惯导加速度辅助锁相环框图Fig.4 The structure of the phase locked loop aided by inertial acceleration

惯导实际输出的加速度信息具有一定的延时和更新率,典型更新率为500Hz、200Hz、100Hz,相对应产生的时延约为2ms、5ms、10ms。
为了推导惯性辅助后的系统传递函数特性,建模如图 5所示。将系统输入相位分为两个部分,理想相位θi(s)和测量噪声ei(s),理想相位经两次微分后得到信号理想的加速度,由于惯导的加速度测量精度很高,所以惯导辅助量A(s)近似等于理想相位的两次微分,如图 5中虚线部分所示,并没有真正连接,只是为了推导系统传递函数。模型可等效成两个跟踪环路,一个跟踪环路跟踪相位测量误差ei(s),另一个跟踪环路跟踪输入相位θi(s)。

图5 惯导加速度辅助锁相环模型Fig.5 The model of the phase locked loop aided by inertial acceleration
跟踪相位测量误差的系统传递函数为
(4)
跟踪输入相位的系统传递函数为
(5)
在无惯性加速度信息辅助时,式(4)的系统传递函数就是整个系统的系统函数,当有惯性加速度信息辅助时,系统等效成两个系统传递函数,接收机动态应力主要由跟踪输入相位的环路承受,系统传递函数为式(5),相位测量误差部分主要由跟踪相位测量误差的环路承受,系统传递函数为式(4)。
分析系统传递函数Hθ(s)可知,当k、τ等于0时,即惯导测量无误差且辅助无延迟时,Hθ(s)=1,带宽无穷大,能够承受任何动态;实际中,惯导辅助会有一定的时延和测量误差,Hθ(s)等效为带宽很大的低通滤波器,能够跟踪并消除大部分动态应力引起的载波相位变化量。
在惯性加速度信息辅助消除大部分动态应力的情况下,三阶锁相环可以采用更小的带宽进行跟踪,减小热噪声对系统的影响,提高相位测量精度,从而提高系统性能。
惯导辅助加速度信息的精度、时延和更新率决定着环路性能,由于惯导加速度精度很高,时延和更新率成为了关键参数。下面针对高动态场景,在不同时延和更新率条件下,仿真分析惯导加速度信息辅助的系统性能。
4 仿真分析
首先设定仿真的基本动态场景,加速度随时间变化曲线如图6所示,在13s时,有持续50ms时间的1200g/s的加加速度,30s时有持续5s的10g/s的加加速度,35s时有持续5s的-10g/s的加加速度,50s时有持续5s的-30g/s的加加速度,55s时有持续5s的30g/s的加加速度。

图6 加速度随时间变化曲线Fig.6 Acceleration versus time curve
在上述加速度的基础上,首先仿真不加辅助的情况。设定信号载噪比为43dB·Hz,锁相环带宽为30Hz,仿真结果如图 7、图 8所示,锁相环锁定值在1200g/s加速度时发生一段时间失锁现象,频率误差有较大跳动。

图7 锁相环锁定值(30Hz,no aided)Fig.7 PLL locked value(30Hz,no aided)

图 8 频率误差(30Hz,no aided)Fig.8 Frequency error(30Hz,no aided)

图9 锁相环锁定值(30Hz,aided,5ms)Fig.9 PLL locked value(30Hz,aided,5ms)

图10 频率误差(30Hz,aided,5ms)Fig.10 Frequency error(30Hz,aided,5ms)
载噪比和锁相环带宽不变,增加惯性加速度信息辅助,辅助更新率200Hz,延时为5ms,结果如图 9、图 10所示。有辅助后,锁相环锁定值一直在0.8以上,锁相环不再失锁,频率误差最大抖动范围为4Hz左右,明显比不加辅助时的抖动范围小,可见在带宽相同的情况下,通过辅助,提高了环路的动态性能。
载噪比不变,辅助更新率200Hz,辅助延时为5ms,减小锁相环带宽为5Hz,结果如图 11、图 12所示,减小环路带宽到5Hz时,锁相环仍能够正常跟踪信号,在加加速度为0时,频率误差抖动范围比带宽为30Hz时要小,提高了测量精度。

图11 锁相环锁定值(5Hz,aided,5ms)Fig.11 PLL locked value(5Hz,aided,5ms)

图12 频率误差(5Hz,aided,5ms)Fig.12 Frequency error(5Hz,aided,5ms)
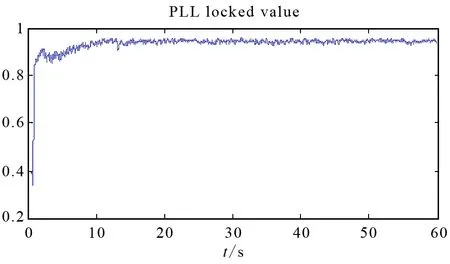
图13 锁相环锁定值(3Hz,aided,2ms)Fig.13 PLL locked value(3Hz,aided,2ms)
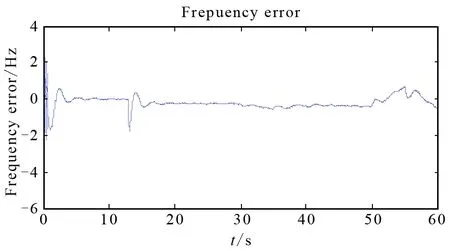
图14 频率误差(3Hz,aided,2ms)Fig.14 Frequency error(3Hz,aided,2ms)
载噪比不变,辅助更新率500Hz,辅助延时为2ms,减小锁相环带宽为3Hz,结果如图 13、图 14所示,减小环路带宽到3Hz时,锁相环仍能够正常跟踪信号,在加加速度为0时,频率误差抖动范围更小,测量精度进一步提高。

图15 锁相环锁定值(7Hz,aided,10ms)Fig.15 PLL locked value(7Hz,aided,10ms)
载噪比不变,辅助更新率100Hz,延时为10ms,减小锁相环带宽到7Hz,结果如图 15、图 16所示,有辅助后,锁相环不再失锁,频率误差最大抖动范围为10Hz以内,可见在辅助延时较大时,仍能有效提高环路性能。

图16 频率误差(7Hz,aided,10ms)Fig.16 Frequency error(7Hz,aided,10ms)
通过对比以上仿真结果可见,辅助更新率越高,辅助延时越小,辅助效果越好。
4 结论
本文提出了惯导加速度信息辅助三阶锁相环的模型,分析了其系统传递函数特性。针对持续时间为50ms,加加速度达到1200g/s的高动态应用场景进行了仿真,不辅助时,即使锁相环采用30Hz的大带宽,锁相环也会有一段时间失锁;采用辅助后,辅助更新率100Hz,辅助延迟为10ms时,锁相环带宽可以减小到7Hz,辅助更新率200Hz,辅助延迟为5ms时,锁相环带宽可以减小到5Hz,辅助更新率500Hz,辅助延迟为2ms时,锁相环带宽可以减小到3Hz,辅助信息具有高的更新率和较小的延时,锁相环可以采用更小的带宽,减小带宽后,提高了相位测量精度。仿真分析结果表明,在加速度信息辅助下,即使压缩载波跟踪环路等效噪声带宽到3Hz,在高达1200g/s加加速度动态下,环路跟踪同样稳定可靠。采用惯性加速度信息辅助三阶锁相环的方法,能在跟踪高动态信号的同时,具有更高的相位测量精度。
[1] 韩慧珍,陈红林,王海勃.INS辅助GPS载波跟踪环分析[J]. 电光与控制,2010,18(10): 59-63.
[2] 丛丽,郑智毅,金天等.INS加速度信息辅助GPS载波跟踪方法研究[J]. 计算机工程与设计,2012,33(11):4356-4361.
[3] 赵剡,易骁骁,张晓明.INS辅助的GPS接收机跟踪环结构和性能分析[J]. 宇航计测技术,2007,27(6): 45-48.
[4]DemozGebre-Egziabher,AlirezaRazavi.DopplerAidedTrackingLoopsforSRGPSIntegrityMonitoring[A].In:ProceedingsofIONGPS/GNSS2003[C]//.FairfaxVA:USAInstituteofNavigation,Inc.,2003,2561-2571.
[5] 谢钢.GPS原理与接收机设计[M]. 电子工业出版社,2009.7.
PerformanceAnalysisoftheThirdOrderPLLAidedbyInertialAccelerationunderHighDynamicConditions
LI Yu-long,ZUO Qi-yao,LI Feng
(Beijing Institute of Automatic Control Equipment,Beijing 100074,China)
This paper presents the arithmetic of 3rdorder carrier PLL assisted by acceleration information from INS(Inertial Navigation System),also introduces the performance of tracking loop with different parameter of loop. The model for high dynamic condition and accelerates information delay are built,based on the model,the arithmetic is simulated. The result indicates that,with accelerate information auxiliary,tracking loop is stable under 1200g/sconditionevencompressingthenoisebandwidthofcarriertrackingloopdownto3Hz.
High dynamic; Acceleration; Phase locked loop; Inertial assistance
2015 - 03 - 10;
2015 - 04 - 07。
李育龙(1988 - ),男,硕士,主要从事卫星导航技术方面的研究。
E-mail: 845983665@qq.com
TP
A
2095-8110(2015)03-0074-06
猜你喜欢
农业工程学报(2022年13期)2022-10-09
电气电子教学学报(2022年3期)2022-07-30
灌溉排水学报(2022年6期)2022-07-13
南方电网技术(2021年8期)2021-09-24
水泥工程(2020年4期)2020-12-18
电动工具(2020年4期)2020-08-20
电子制作(2019年15期)2019-08-27
北京航空航天大学学报(2017年4期)2017-11-23
知识文库(2017年21期)2017-10-20
中学生数理化·七年级数学人教版(2017年2期)2017-03-25