电动舵机中的电流环分析及校正
2015-03-11 05:15熊官送李浩男徐方洁曹东海
导航定位与授时 2015年3期
熊官送,李浩男,徐方洁,曹东海
(北京自动化控制设备研究所,北京100074)
电动舵机中的电流环分析及校正
熊官送,李浩男,徐方洁,曹东海
(北京自动化控制设备研究所,北京100074)
以电动舵机中电流控制问题为研究对象,通过对直流电机电流数学建模及频域分析,阐述了常规电流环控制器校正后的电流频率响应特性。针对电流负反馈容易引入测量噪声、采样延时带来不稳定等问题,提出采用陷波滤波器串联校正电流的频率特性,并给出了滤波器参数设计方法。分别对串联校正和电流负反馈控制进行了实验验证,结果表明采用陷波滤波器串联校正能够抑制峰值电流,与电流环比例控制效果接近,其实现简单、稳定性好。
直流电机;电流环;陷波滤波器
0 引言
电动舵机具有简单可靠、工艺性好、使用维护方便、能源单一、成本低廉等优点[1],被广泛应用于各种飞行器伺服控制系统中。随着电机及驱动控制技术的发展,电动舵机功率等级逐步提高,取代传统的液压、气动等类型舵机,成为飞行器伺服系统的重点发展方向。
电动舵机控制系统通常由位置环、速度环和电流环三环控制,其中电流环作为控制回路的最内环,其动态响应特性直接影响整个系统的动态性能,并且对功率驱动器、电机的损耗等产生决定性影响。文献[2] 研究了不同调制方法对电流环响应的影响,文献[2-5]研究了不同控制策略对电流动态及系统鲁棒性的影响。为了提高电流环的动态性能,文献[6]全面分析了影响电流环性能的因素,提出了在普通PID 控制的基础上引入前馈控制的方法,结果表明能够提高电流环跟踪速度。文献[7]中提出了采用反电势补偿方法,减小了反电势对电流环的影响,提高了电流跟踪精度。
但是,对于电流环对电流频率特性影响的分析,以及在无电流传感器情况下,对于电机电流控制的研究很少。本文首先根据电机的数学模型,对电机的电流频率特性进行了计算,并对电流反馈控制与电流频率响应之间的关系进行了分析。针对工程中电流响应峰值高、电流负反馈引入测量噪声等问题,提出了串联陷波器校正的方法。通过仿真和实验验证,采用陷波滤波器校正能够有效减小系统高频电流,降低电流对高频信号噪声的响应幅值,增强系统的可靠性及降低硬件成本。
1 电机数学模型及电流频域特性分析
电动舵机通常采用直流电机或无刷直流电机驱动,并应用PWM功率放大器驱动电机工作。通常PWM开关频率设计为10~20kHz,因此可以将其近似为纯比例环节Ku(电源电压),通过调整PWM占空比调节电机两端电压。电机数学模型方框图如图1所示。

图1 直流电机的模型框图Fig.1 Block diagram of DC motor
在不考虑电机非线性特性及负载力矩Tl的情况下,得到电机电流i与输入指令uc(调制占空比)传递函数为
(1)

(2)
式(2)关于ω的偏微分方程为式(3),通过求极值,可得到电流频率响应|G1(ωj)|的峰值ip以及对应的频率ωp,暂时称为电流谐振峰值及频率。
(3)
根据式(3)求解得
图2为电机电流响应的典型伯德图,可以看出电流频率响应存在谐振,谐振频率为ωp。通常电动舵机系统频带ωc远小于电流谐振频率,因此若电机控制信号中含有高频噪声时,则会引起电机电流谐振,电流幅值增大,不利于系统安全运行,需采用电流环对电机电流进行控制。

图2 电流伯德图Fig.2 Bode diagram of current
2 电流环控制器设计及分析
2.1 电流负反馈控制
通过引入电流负反馈,可以对电流响应特性进行校正。从图3可以看出,电流反馈与电动势产生了交叉反馈,一般在电流环设计时,不考虑电动势的影响,但电流响应频率高,需通过等效变换来精确分析系统的电流特性。等效变换后的框图见图4所示。

图3 电流环框图Fig.3 Block diagram of current-loop

图4 电流环简化框图Fig.4 Block diagram of reduced current loop
从图4中可以看出,电流环内回路为电机电流模型G1,电流反馈系数为Kfi,于是电流闭环响应传函Gcp为
(4)

(5)
(6)

图5 等效电流环框图Fig.5 Block diagram of equivalent current loop
对比式(1)和式(5)、式(6)可以发现,当采用P控制器时,并没有改变电流模型结构,通过调整Kp、Kfi可以调节电流模型G1中的系数k1,即等效调节电机电阻R,从而可以调节电流响应峰值ip;而采用PI控制器时,系统增加了零点,可以加快电流低频段的响应速度和减小电流跟踪的稳态误差,同时可以调节原模型G1中系数k1、k2,也可以对电流响应峰值及频率进行调整。
针对电流响应模型G1,根据零极点对消原理,设计ACR的理想控制器为PII控制器
(7)
于是系统闭环传函为
(8)
通过调整控制器实现零极点对消,系统将被校正为典型Ⅰ型系统,闭环传函为一阶惯性环节,电流实现稳态无静差跟踪电流控制指令。
图6为分别采用以上几种电流控制器后,电机电流频率特性曲线。可以看出采用P(Kp=1)控制能够削弱电流谐振峰值,但电流稳态响应存在较大静差;PI与PII控制效果相当,在低频段系统静差小,系统响应特性好,但积分控制同时带来相位滞后、容易饱和及系统超调振荡等负作用。并且在位置伺服系统中,电流环的跟踪误差可通过速度环或位置进行补偿,而电流响应峰值不应过高,于是可以仅从限制电流响应峰值方面对电流频率特性进行校正。

图6 电流环伯德图Fig.6 Bode diagram of current loop
2.2 基于串联校正的电流调节器设计及分析
在目前电动舵机中大多数是通过电流负反馈控制调节电流响应特性,但与此同时也引入了电流测量噪声。在某些中小功率舵机中,受硬件成本或体积空间限制,往往没有电流传感器,为满足电流响应峰值不得不选用较大容量的功率器件。本文根据电流频域特性,提出一种类似陷波器结构的电流校正器取代电流反馈控制,对电流响应峰值进行抑制,具体实现如下。
根据式(1)电流响应模型G1,设计的电流调节器G2如下
(9)
其中,通过调节G2的零点与电流模型G1的极点对消后,重新配置系统的极点从而调节电流幅频响应特性。如当

图7 电流校正框图Fig.7 Block diagram of current correction
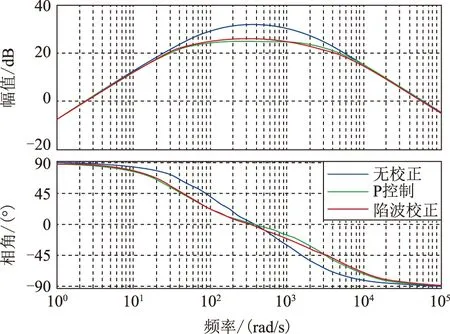
图8 电流频率响应Fig.8 Frequency response of current
3 实验结果及分析
为了验证本文的理论分析及仿真结论,在某数字式电动舵机系统中,分别对电流负反馈控制和串联校正控制进行了设计及验证,实验参数如表1所示。

表1 电动舵机参数Tab.1 Prameters of the electromechanical actuation
按控制周期Ts=0.000067s离散化后的传函为
在以DSPTMS320F28035、IPMPS21765为核心的硬件平台上,以扫频信号(40s,0~400Hz)对舵机电流环进行测试,测试结果如图9所示。

图9 电流响应波形Fig.9 The frequency response waveform of current
从电流响应曲线可以看出,电机在不采取任何校正措施时,其谐振峰值为40A左右,对应频率为50Hz左右(图9a),与理论计算结果基本一致。当采用电流负反馈P控制时(图9b)电流频率响应峰值降为32A左右,高频段(100~400Hz)电流幅值略下降。采用了陷波器校正控制后的电流响应曲线(图9c),可以看出电流频率响应峰值下降的同时,高频段电流幅值下降明显,为校正前的一半左右,验证了陷波器设计的有效性。因此,采用陷波器校正可以灵活对电流环的频率响应进行校正。最后对电机高速正反转切换时的电流进行了测试,响应曲线如图10所示,采用陷波器后峰值电流由原先58A降为28A,表明电机在运行中的峰值电流得到有效控制,虽然牺牲了部分电机性能,但保证了系统运行的安全性。

图10 电机正反转换向时电流波形Fig.10 Waveform of current when motor change direction
4 结论
本文以电动舵机中电流控制问题为研究对象,在对电流频率特性研究和电流环控制器机理分析的基础上,提出增加陷波串联校正环节调节电流频率特性的方法。仿真分析和实验结果表明,该方法与电流反馈控制效果相近,可抑制高频段电流响应幅值,既能保证舵机的性能,又提高了系统安全性。与常规电流负反馈控制相比,可以避免引入电流信号测量噪声,并且实现简单稳定性好,易于工程应用。
[1] 汪军林. 导弹电动舵机的研究现状及发展趋势[J]. 飞航导弹, 2008,3:45-47.
[2]DixonJ,TepperS,MoranL.Practicalevaluationofdifferentmodulationtechniqueforcurrent-controlledvoltagesourceinverters[J].IEEProceedingsElectricPowerApplications, 1996, 143(4) : 301-306.
[3] 陈荣,邓智泉,严仰光.永磁同步伺服系统电流环的设计[J].南京航空航天大学学报,2004,36(2):220-225.
[4] 王莉娜,朱鸿悦,杨宗军.永磁同步电动机调速系统PI控制器参数整定方法[J].电工技术学报,2014,29(5): 105-117.
[5]ZhangXueguang,ChenJiaming,MaYan,WangYijie,XuDianguo.BandwidthExpansionMethodforCirculatingCurrentControlinParallelThree-phasePWMConverterConnectionSystem[C]//.IEEETransactionsonPowerElcectronics,2014, 29(12):3647-6856.
[6] 郝双晖,蔡一,郑伟峰,刘杰,郝明晖.基于前馈控制的交流伺服系统高速定位控制[J].微特电机,2010(2):34-37.
[7] 杨明,牛里,王宏佳,徐殿国.微小转动惯量永磁同步电机电流环动态特性的研究[J].电机与控制学报,2009,13(6):845-849.
The Analysis and Correction of Current-loop in Electromechanical Actuator
XIONG Guan-song,LI Hao-nan,XU Fang-jie,CAO Dong-hai
(Beijing Institute of Automatic Control Equipment, Beijing 100074, China)
The electric current control problems in the electromechanical actuator is the research object, through establishing the DC motor current mathematical model and analysis of frequency domain, the paper expounds the general current frequency response characteristics of current loop. In view of the current negative feedback easily introducing noise measurement and sampling time delay bringing problems such as instability, the paper presents the notch filter of series correction current frequency characteristic and the filter parameter design method. The experiments are respectively carried out to verify the method of series correction and current feedback control. The results show that the method of the notch filter is simpler and improves stability which prevents the peak current as the current loop proportion control.
DC motor;Current-loop;Notch filter
2015 - 03 - 15;
2015 - 04 - 02。
熊官送(1985 - ),男,硕士,工程师,主要从事伺服控制方面的研究。
TP273
A
2095-8110(2015)03-0061-06
猜你喜欢
太原学院学报(自然科学版)(2021年1期)2021-04-22
四川大学学报(自然科学版)(2021年1期)2021-01-26
物探与化探(2020年2期)2020-04-21
无线电工程(2020年4期)2020-04-02
电子制作(2019年23期)2019-02-23
消费导刊(2018年8期)2018-05-25
演艺科技(2017年3期)2017-05-03
现代计算机(2017年4期)2017-03-29
上海海事大学学报(2016年3期)2016-12-19
导弹与航天运载技术(2016年3期)2016-06-05