基于Tecnomatix的气动焊枪运动学建立
2015-02-24 07:37王玲黄京
机床与液压 2015年22期
王玲,黄京,2
(1.上海通用汽车有限公司整车制造工程部,上海201201;2.上海交通大学机械系统与振动国家重点实验室,上海 200240)
汽车行业日益激烈的竞争环境,对车辆的设计开发、制造技术等提出了更高的要求。不同部件的焊接技术作为车辆制造过程中的关键点,始终受到人们的高度关注[1]。点焊工艺因焊接面积小,外形美观,且无附加焊材等优势而成为各大汽车制造厂所采用的主要焊接方式[2-4]。
车身底板、四门、两盖、侧围等不同部位的焊接情况不同,对焊枪位置、焊枪气缸行程等的要求也千差万别[5],仅仅通过试验手段在现场进行调整工作量大,不利于保证整车质量并快速响应客户需求,缩短新车型上市时间。因此制造工程师需要利用三维数字化资源进行大量仿真,以便在产品设计与工艺设计早期发现问题,及时整改,减少项目风险和费用。
作为当前汽车行业应用最为广泛的制造信息化系统之一,Tecnomatix无论在规划工作还是在仿真工作方面都有很好的表现[6-9]。文中通过对焊枪运动学原理进行分析,建立一套标准的气动焊枪运动学模型并开发实用的函数辅助程序,为今后的焊枪可达性干涉检查、焊枪型号选择等工作奠定基础。
1 气动焊枪模型建立
气动焊枪的三维数字模型通过*.jt文件格式导入Tecnomatix中的Process Simulate仿真软件中,放置到焊枪资源数据库中。
1.1 运动杆件建立
Tecnomatix(Process Simulation)中共同运动的部件集合称为杆件,给焊枪添加运动学的时候首先将不同部件及其附加结构分割成相应杆件[10]。如图1,气动焊枪的工作原理为:气缸带动活塞杆运动,活塞杆拖动连杆,连杆带动静臂绕主轴转动。由于气动的驱动方式产生比较大的振动冲击,一般静臂不直接与基座相连,静臂和基座之间往往是通过缓冲弹簧或平衡气缸连接。
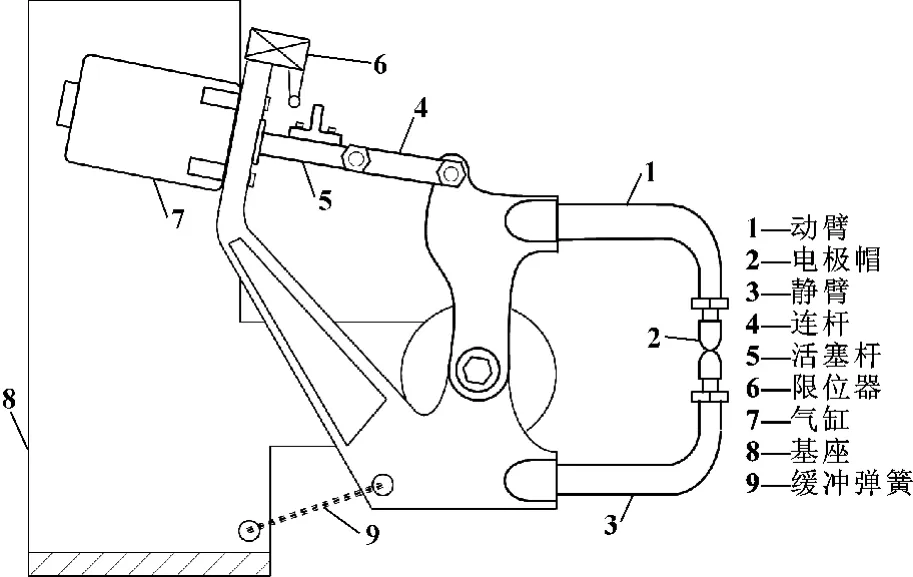
图1 气动焊枪的基本结构
根据以上分析,在Tecnomatix(Process Simulate)中建立6个杆件,如表1所示。其中,tip_opening是为建立独立运动副而设置的空杆件。
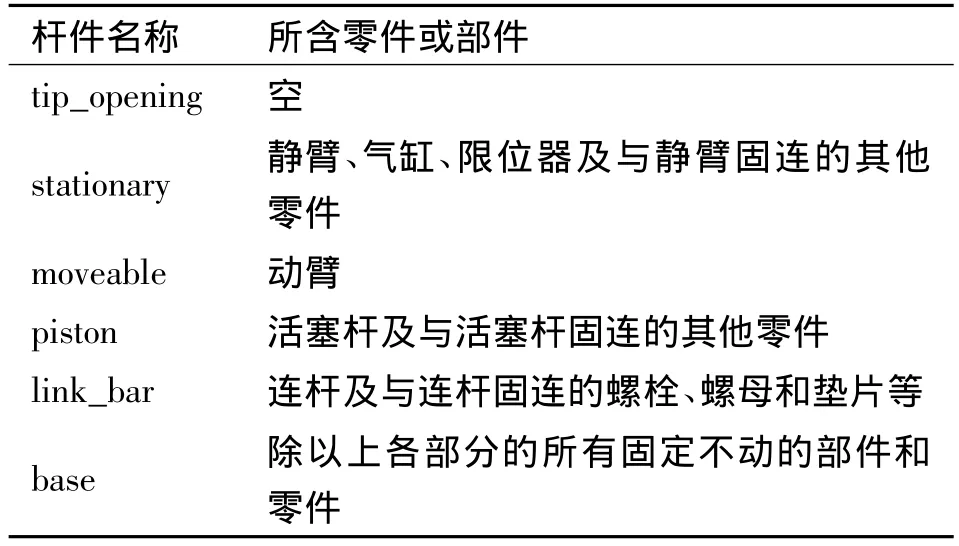
表1 气动焊枪的杆件
1.2 运动副建立
在Tecnomatix(Process Simulation)软件中为建立的杆件添加运动副和运动学 (见图2),杆件设置成功后将被标示以不同的颜色,空杆件为灰色。Tecnomatix(Process Simulation)中的运动副表达的是杆件间的相对运动,箭头由参照杆件指向运动杆件,运动杆件的 (转动或平动)轴线始终与参照杆件的运动状态相同。气动焊枪共需要建立5个运动副,其中,j1指的是焊枪动臂电极帽与静臂电极帽之间的距离,j5为由于气动冲击造成的静臂绕基座的摆动,j2、j3和j4均为非独立运动副,需要通过运动学分析定义运动函数,运动函数的大小为相对运动中平动距离或摆动角度相对于初始位置的变化量。

图2 气动焊枪的杆件及运动副
2 气动焊枪的运动学分析
2.1 气动焊枪的机构类型
X型气动焊枪的机构类型为平面滑杆摆杆机构(见图3),并且在初始位置时活塞杆和连杆位置共线。
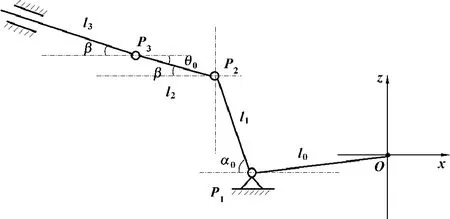
图3 气动焊枪的机构初始位置示意图
2.2 气动焊枪运动学分析
以电极帽尖端为原点 (见图3)、垂直原理焊枪开口方向为x轴、焊枪开口最大方向为z轴建立坐标系,3个铰链点的初始位置坐标分别为 P1(x1,z1)、P2(x2,z2)、P3(x3,z3),需要求出的运动副函数表达式分别为静臂摆动角度α、活塞杆平动位移l3和连杆相对于活塞杆的摆动角度θ。
l0、l1、l2分别为图示杆件的长度:

α0为杆件l1与x轴夹角的初始值,β是杆件l3与x轴的夹角:

如图4,w为焊枪开口大小,静臂摆动的角度为:

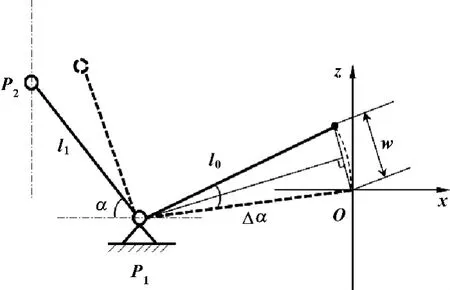
图4 气动焊枪开口和静臂摆动角度的关系
如图5,P2运动至新位置后的坐标为:

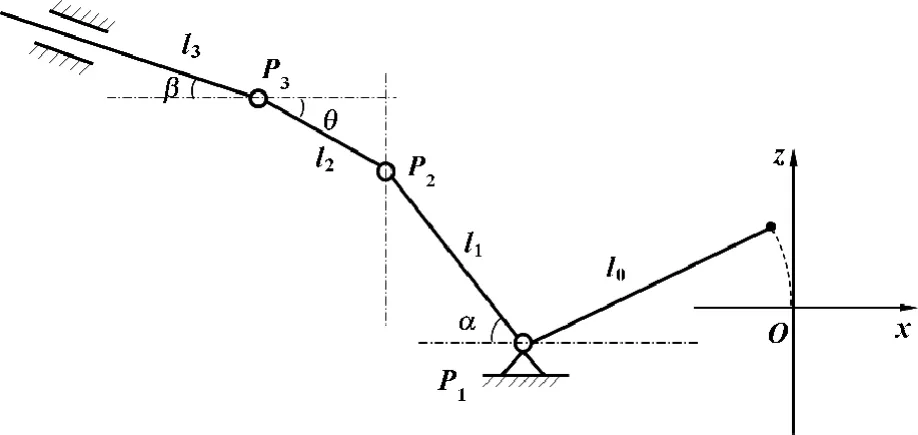
图5 焊枪开口大小为w时的机构位置
如图6,杆件l3运动至新位置后的坐标为:


图6 杆件l3移动至新位置
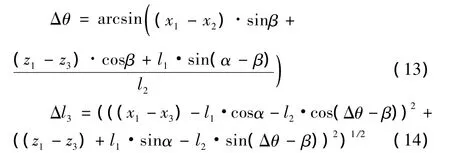
由P3坐标计算获得P2的新位置坐标为:

联立式 (9)与式 (11),获得二元方程组:

该方程组的解为:
3 运动函数程序开发
3.1 自定义运动副函数
Tecnomatix(Process Simulation)仿真软件对运动函数格式有严格要求,D表示滑动副大小,T表示转动副大小。由式 (7)得到j2的函数:

由式 (13)得运动副j4的函数为:

式 (15)是运动副j3移动的距离,当D(j1)>0时,D(j3)=Δl3;当D(j1)<0时,D(j3)=-Δl3。在Tecnomatix(Process Simulation)中规定了逻辑式的值:

将上述逻辑式经过适当改造,得D(j3)的函数为:

3.2 基于VBA的仿真函数生成程序
由于建立3D焊枪数据的过程中对于气动焊枪运动学仿真的需求十分庞大,手动书写公式效率低且易出错,基于VBA开发了仿真函数生成程序[11]。部分截面如图7所示。
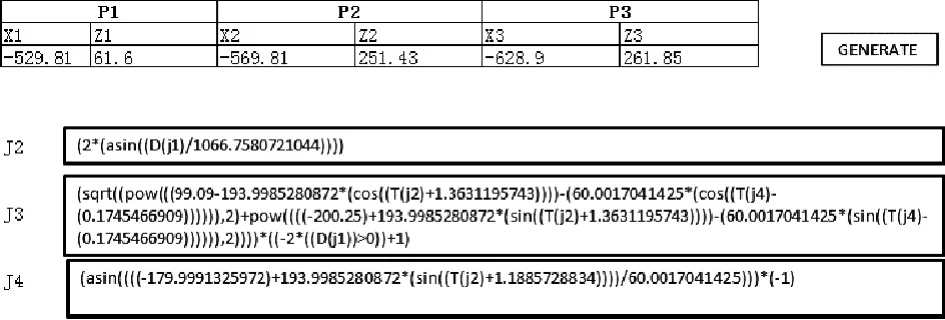
图7 基于VBA的仿真函数生成程序
程序获取用户输入的机构初始位置相关坐标后,将数值代入函数原型,以字符串格式输出至文本框,以j3的运动学函数为例,其函数原型为式 (18),j3文本框的相应代码如下:
其中黑正体为后台计算的数值量,其他均为字符串格式,使用运算符&强制叠加后输出至界面,用户拷贝后至相应的函数定义窗口。
4 结束语
基于Tecnomatix(Process Simulation)建立了气动焊枪的运动学仿真,基本表达了气动焊枪的真实运动,基于VBA开发的仿真函数生成程序界面简洁,运行稳健可靠,节约了仿真工作时间,保证了正确率。文中研究亦可作为基于Tecnomatix(Process Simulation)的其他各类设备的运动学仿真的参考。
[1]李仕慧,王英杰.汽车用镁合金焊接的研究进展[J].金属铸锻焊技术,2010,39:190 -194.
[2]顾春影,陈根余,梅丽芳,等.车身零部件的激光搭接焊与电阻点焊对比分析[J].金属铸锻焊技术,2011,40:136-139.
[3]武守辉,陈思杰,牛济泰,等.汽车制造中铝和钢异种金属间的点焊研究[J].热加工工艺,2013,42(11):17-20.
[4]戴劲.气动伺服点焊焊枪控制技术研究[D].南京:南京理工大学,2014.
[5]冯晓天,陈云.基于气伺服焊枪的点焊质量控制[J].热加工工艺,2013,42(5):197 -199.
[6]王朋.基于Tecnomatix的数字化装配工艺规划及后处理[D].哈尔滨:哈尔滨工业大学,2012.
[7]朱杰.Tecnomatix在汽车焊装领域的应用及思考[J].电焊机,2013,43:16 -19.
[8]田富君,张红旗,陈帝江,等.基于Tecnomatix 的三维装配工艺设计与仿真技术研究[J].制造业自动化,2013,35(8):11-13.
[9]HAO L,WU B.Research on Virtual Assembly of CRH on the Basis of Tecnomatix Platform[J].Machinery & Electronics,2011(2):9.
[10]BOROJEVIC S,JOVISEVIC V,JOKANOVICS.Modeling,Simulation and Optimization of Process Planning[J].Novi Sad,2009,12(1):87.
[11] ALBRIGHTS.VBA for Modelers:Developing Decision Support Systems with Microsoft Office Excel[M].Cengage Learning,2009.
猜你喜欢
沈阳理工大学学报(2022年3期)2022-08-11
现代农机(2022年3期)2022-07-11
汽车实用技术(2022年5期)2022-04-02
组合机床与自动化加工技术(2019年11期)2019-11-27
流体机械(2017年9期)2017-02-06
焊接(2016年6期)2016-02-27
焊接(2016年5期)2016-02-27
焊接(2015年6期)2015-07-18
焊接(2015年8期)2015-07-18
制造技术与机床(2015年8期)2015-04-24