多弹种快速供弹系统设计*
2015-02-22 05:48:44庞伟刘杰李强段乐乐
火力与指挥控制 2015年1期
庞伟,刘杰,李强,段乐乐
(1.中北大学机电工程学院,太原030051;2.北方工程设计研究院,石家庄050011)
多弹种快速供弹系统设计*
庞伟1,刘杰1,李强1,段乐乐2
(1.中北大学机电工程学院,太原030051;2.北方工程设计研究院,石家庄050011)
在研究国内外供弹系统的基础上,借鉴它们的可取之处,通过机构上的综合和创新来建立一个有效的、可行的方案模型,确定供弹系统的结构形式与布置方式,对其进行详细设计,并在Solidworks中建立供弹系统的实体模型。完成了方案的总体结构布置和时序设计。对弹鼓进行了结构和运动规律设计,完成了弹丸的运动过程分析,运用ADAMS对模型进行了仿真验证。为提高舰炮的射速和供弹系统的自动化以及多弹种快速转换能力提供了新的思路与构想。
舰炮,供弹系统,时序设计,动力学分析
0 引言
在现代战争中,舰艇面临的作战任务和威胁复杂多样,而且越来越多的来自空中、海上和陆地的精确制导武器的威胁,使水面舰艇在战争中的生存环境变得愈加险恶。由于固有的技术局限及高昂的成本,防空导弹不可能完全取代舰载火炮武器系统。大中口径舰炮在射程上可以弥补两者之间的火力盲区,又不容易受干扰,可以较好地履行中程防空任务。近年来随着由海向陆战略的提出,要求舰炮具有远程火力打击及火力支援的功能,在装备增程制导弹药以后,可以对敌纵深目标实施持续快速、精确的打击。有效弥补舰载导弹数量少、造价高昂的弱点。随着现代军事科学技术的进步和海军战略思想、海战模式及海上战场环境的变化,舰炮武器系统正逐步发展成为拥有多种功能的先进武器发射平台[1]。
要提高整个舰炮武器系统的打击效能,就要从舰炮的供弹系统入手,提高供弹系统的自动化、载弹量水平以及反应和运行速度。为了满足未来舰载大口径火炮武器作战系统的作战要求,需要设计一套能够快速连续供弹、快速更换弹种的全自动供弹系统。
1 多弹种快速供弹系统结构形式
1.1 供弹系统拓扑结构
所设计的新型舰炮供弹系统应该拥有足够大的载弹量,能够兼容存储多种类型的弹药,模块化、轻量化水平高,具有良好的可扩展性,能够根据中央计算机的指令安全迅速地识别、转运所需的弹药,完成引信装订及参数设置,实现任意射角及方位角下弹药的自动装填,具备故障自我检测及指示功能,能够在某些零部件损坏的情况下保证主要功能正常或是降低某些性能指标能够正常使用等[2]。
为了完成多弹种的存储与快速选择,本方案采取多弹鼓容弹、单线扬弹的总体布置方式,可以根据不同舰型和作战使命配置不同数量的弹鼓,本方案采用4弹鼓组合形式。4个弹鼓布置在正方形的4个角上,扬弹机可以绕自身轴线旋转以接收不同弹鼓推出的炮弹,它有4个固定的旋转角,分别为-135°、-45°、45°、135°,扬弹通道位于炮塔回转中心。总体布置方式如图1所示。
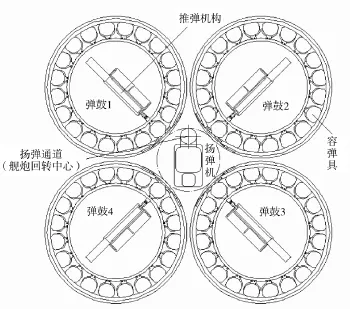
图1 供弹系统总体布置方式
为了满足舰载大口径火炮的作战需求,供弹系统至少要能提供预制破片空炸弹药、高爆榴弹、增程制导炮弹等几种基本类型的弹药。因为防空作战对火炮的射速要求较高,所以弹鼓1或是弹鼓2用于装载防空用预制破片空炸弹药,弹鼓3和弹鼓4分别用于装载高爆榴弹和增程制导炮弹。由于供弹装置具有4个弹鼓,可以根据作战任务和战场环境灵活布置这几种弹药。弹鼓1和弹鼓2可以同时装载预制破片空炸弹药,也可以将4个弹鼓中的一个用作备份弹鼓,在作战的同时由自动化弹库向其中补充当前所使用的弹种,在当前弹鼓弹药用尽时转而使用此弹鼓,再向空弹鼓中补弹,以满足射速和火力持续性的要求。供弹系统的实体模型如图2所示。

图2 供弹系统实体模型
1.2 供弹系统系统时序设计
目前世界其他国家在研或装备的127/130 mm舰炮有美国MK45系列舰炮、意大利OTO单管127 mm舰炮、和俄罗斯A-192E型130 mm舰炮[3],它们的主要性能参数如表1所示。本系统的设计供弹率为40 rds/min,一发弹的供弹周期为1.5 s。
现在以连续供弹时的一个周期为例说明供弹装置的工作过程。扬弹机将炮弹供给摆弹臂后,弹药提升装置首先下降,对应于t1时段。当弹药提升装置完全下降到夹板以下时,扬弹机开始旋转并对正选定弹种的弹鼓,弹药提升装置继续下降并对准弹鼓的弹药出口准备接弹,弹鼓在弹药提升装置就位前t'时刻旋转到位,对应于t2时段。之后弹鼓内的推弹机构运动将炮弹推入扬弹机的弹药提升装置当中,对应于t3时段。之后推弹臂收回,同时扬弹机回转并扬弹,在弹药提升装置碰到甲板前扬弹机回转到位;当推弹臂收回到位后,弹鼓开始回转,对应于t4时段。弹药提升装置继续上升直至将炮弹送入摆弹臂,对应于t5时段。弹鼓在t4时段结束前开始旋转,经历t5、t1时段,在t2时段结束前t'时刻旋转到位。供第一发弹时没有t1时段。供弹装置工作时序图如下页图3所示。
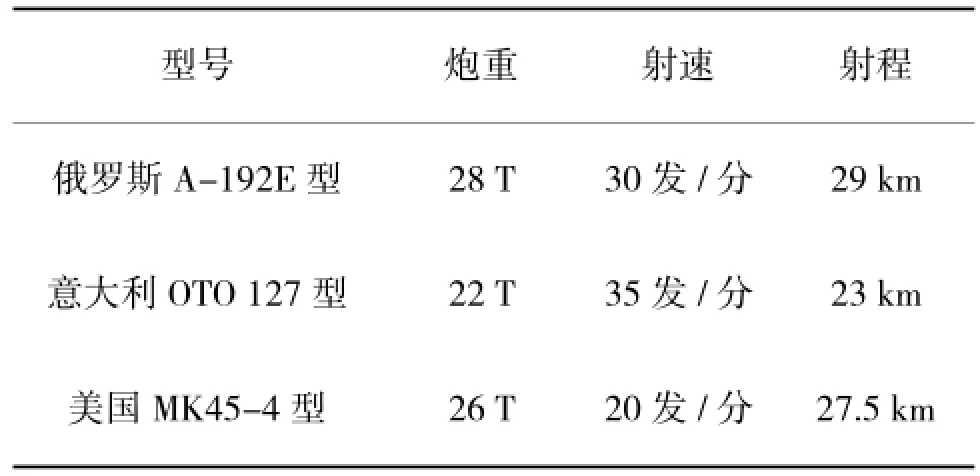
表1 世界主要127/130 mm舰炮性能指标
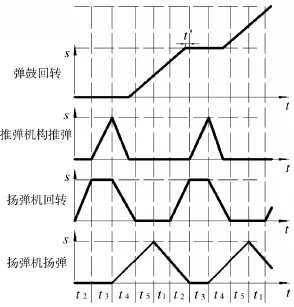
图3 供弹装置工作时序图
2 弹鼓子单元设计
2.1 弹鼓结构布置形式
弹鼓单元采用齿轮传动的回转式总体结构,回转部分通过回转支承与底座进行连接。主要由底座、回转支承、回转支承连接座、容弹具,容弹具连接座、推弹机构,挡圈、外罩、中间传动模块及传动模块等主要部分组成。在综合考虑弹鼓的径向尺寸、驱动功率和容弹量之间的矛盾关系,采用单个容弹弹鼓装载20发炮弹的设计,它们在容弹具连接座上呈圆周方式布置,容弹具中心的回转半径为780 mm。弹鼓截面布置图如图4所示。
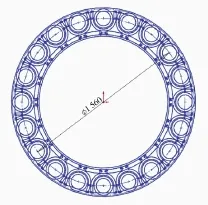
图4 弹鼓截面布置图
2.2 弹鼓回转速度设计
在一个供弹周期T(T=t1+t2+t3+t4+t5=1.5 s)的时间内,除了推弹机构动作的时间加上t'这段时间外,是弹鼓旋转一个弹位的时间。推弹机构的动作距离设计为300 mm,推弹臂的工作速度为1 m/s,空回速度为1.25 m/s,则推弹机构动作的时间为:

那么有0.96 s可用于弹鼓回转,为了在推弹前使炮弹的姿态稳定,取t'=0.16 s,那么弹鼓旋转一个弹位(18°)用时0.8 s。取弹鼓回转时的加减速时间段都为0.2 s,那么由梯形面积公式可知弹鼓运动匀速段的速度为30°/s,其运动规律如图5所示。
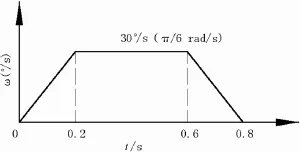
图5 弹鼓运动规律
2.3 动力学计算分析
加减速时角加速度的大小为:
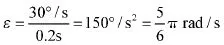
则在加减速阶段炮弹的切向加速度:

炮弹在运动过程中,在加减速阶段所受的惯性力[4]的大小为:

炮弹的质量为52.8 kg,所受的最大离心力为:

弹鼓回转时炮弹的受力简图如图6所示。
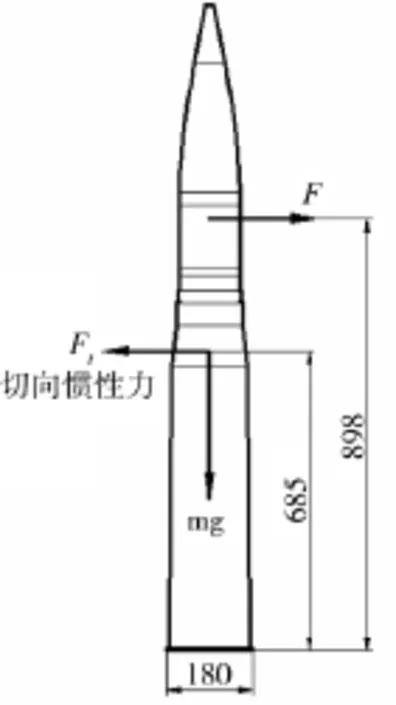
图6 炮弹运动过程受力简图
切向惯性力产生的倾覆力矩为:

重力提供的平衡力矩为:

那么容弹具上定位夹持机构应提供的平衡力矩为:

其作用力F为:
定位夹持机构靠两个滑齿卡住炮弹的圆柱部,每侧的滑齿后面并列装有两根弹簧,由上面的数据可以计算出弹簧的刚度为2 N/mm,预压力6 N,弹丸装入容弹具后压缩滑齿,此时每根弹簧提供的压力为14.5 N,并且每侧还留有1.75 mm的可压缩空间,以防有可能出现的卡滞等小干涉。
2.4 仿真分析
在Solidworks中建立弹鼓的实体模型,并将模型适当简化后导入ADAMS中进行仿真分析,查看弹鼓的运动特性以及在运动过程中弹丸在容弹具中的姿态。弹鼓的虚拟样机模型如图7所示。

图7 虚拟样机模型
在ADAMS中按照实际的情况为模型添加约束、接触、柔性连接以及材料属性等,然后按照图4的运动规律为弹鼓添加驱动,其函数表达式为(STEP(time,0,0,0.2,30)+STEP(time,0.6,0,0.8,-30))*1d。在容弹具的中心建立两个marker点,一个随容弹具运动,一个固定在大地上,再在弹鼓中心建立一个marker点,以此3个marker点建立角度测量,可以知道弹鼓的旋转角度,以验证驱动方式是否精确。在一个周期内弹鼓的运动速度和旋转的角度如图8、图9所示。
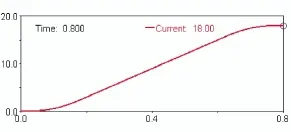
图9 一个周期弹鼓旋转的角度
在炮弹质心与容弹具相同位置各建立一个marker点,建立它们之间点对点的测量,以观察运动过程中炮弹姿态的变化情况。则炮弹与容弹具之间在X方向(体现为切向)和在方向(体现为径向)(Y方向与弹轴方向平衡)的偏移量如图10、图11所示。由图中可以看出X方向的晃动量在±0.75 mm以内并且呈中心对称,在在方向的晃动量在-0.075mm~0.525 mm以内。
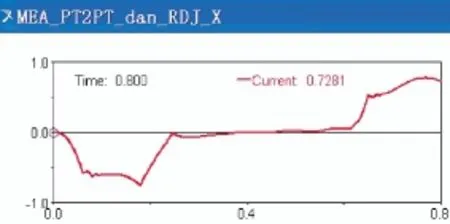
图10 炮弹与容弹具之间在X方向之间的偏移量
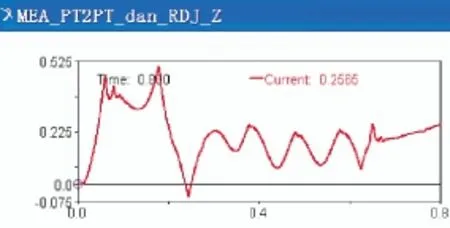
图11 炮弹与容弹具之间在在方向之间的偏移量
定位夹持机构的结构如图12所示,容弹具两侧滑齿的弹簧的压力及变形量如图13、图14所示。

图12 定位夹持机构的结构
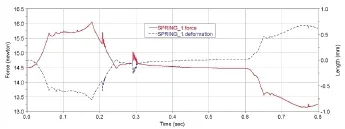
图13 滑齿一侧弹簧的压力及变形量
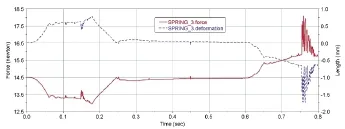
图14 滑齿另一侧弹簧的压力及变形量
弹簧SPRING_1和SPRING_3分别位于容弹具的两侧不同的定位扶持机构上。由以上图可以看出,弹簧SPRING_1(受力情况和SPRING_2完全相同)在容弹弹鼓的加速段受压较为厉害,而SPRING_3(受力情况和SPRING_4完全相同)在减速段受压较为厉害,在匀速运动阶段两个弹簧的压力保持一个比较稳定的值,与实际的受力情况比较符合。
3 结论
由ADAMS的仿真结果可以看出弹鼓的运动规律简单便于控制,不会产生累积误差,满足设计要求。定位夹持机构设计合理,能够在弹鼓旋转过程中对炮弹起到一个比较好的定位扶持作用,使炮弹保持一个比较好的姿态,有效地保护炮弹在弹鼓运动过程免受晃动磕碰的伤害,在X方向的晃动量在±0.75 mm以内,并且呈中心对称,符合加减速规律;在在方向的晃动量在-0.075 mm~0.525 mm以内,主要是由于离心力的作用而偏向外侧。通过这些分析可知弹鼓的设计较好地满足了设计要求,为工程化提供了重要参考和设计依据。
[1]陈汀峰.对舰炮发展的思考[J].舰船科学技术,2007,29(S1):3-10.
[2]侯保林,樵军谋,刘琮敏.火炮自动装填[M].北京:兵器工业出版社,2010:1-4.
[3]张世英.三分天下的大口径舰炮[J].现代舰船,2009(10A):40-42.
[4]蔡泰信,和兴锁.理论力学[M].北京:机械工业出版社,2004:341-342.
[5]刘杰,李强,周强.转管武器炮膛合力施加方法研究[J].火炮发射与控制学报,2013(2):38-41.
Multi-balls Plant the Fast Ammunition Feed System Design Research
PANG Wei1,LIU Jie1,LI Qiang1,DUAN Le-le2
(1.School of Mechatronic Engineering,North University of China,Taiyuan 030051,China;
2.Norendar International LTD,Shijiazhuang 050011,China)
In research at home and abroad feeding system and learning from their merit,establishing an effective,feasible scheme model through mechanism comprehensive and innovative,the structure and layout of feeding system is determined,and solid model of the feeding system in Solidworks is established.Completed the square Case structural arrangement and timing design,playing drums on the structure and movement of conduct designed to complete the process of analysis of projectile motion,use ADAMS simulation model validation.The shell-feeding system can provide a new thinking and conception for improving its automatization level and changing ammunition type quickly.
naval gun,shell-feeding system,timing design,dynamic analysis
TJ303
A
1002-0640(2015)01-0142-04
2013-10-05
2014-01-15
国家自然科学基金资助项目(51175481)
庞伟(1988-),男,内蒙古包头人,工学硕士。研究方向:高射速发射理论技术研究。
猜你喜欢
电池工业(2022年6期)2023-01-30 00:39:06
中阿科技论坛(中英文)(2022年12期)2023-01-03 12:04:44
舰船科学技术(2022年10期)2022-06-17 06:28:04
火炮发射与控制学报(2021年4期)2021-12-20 08:27:18
军事文摘(2021年16期)2021-11-05 08:49:08
军事文摘·科学少年(2021年8期)2021-09-10 21:28:31
装备制造技术(2019年12期)2019-12-25 03:07:32
舰船电子工程(2016年10期)2016-11-07 06:56:37
中国机械工程(2014年3期)2014-12-05 06:53:28
轻兵器(2012年22期)2012-04-29 10:34:55