
海上挤密砂桩测量定位系统技术应用
2015-01-04 09:28:18宋江伟马宗豪
中国港湾建设 2015年5期
宋江伟,马宗豪
(中交一航局第二工程有限公司,山东 青岛 266001)
海上挤密砂桩测量定位系统技术应用
宋江伟,马宗豪*
(中交一航局第二工程有限公司,山东 青岛 266001)
测量定位系统是挤密砂桩施工的一个重要系统。文章结合港珠澳大桥岛隧工程挤密砂桩施工,阐述了挤密砂桩船测量定位系统的原理、安装工艺及实施效果,对海上打桩定位系统开发具有借鉴意义。
挤密砂桩;测量;定位系统;技术应用
0 引言
近年来,随着国家经济的发展,外海地基处理工程量加大,且施工技术难度也随之加大,外海桩基工程施工需要高精度定位系统辅助作业,卲蔚[1]等人研究了早期的海上GPS打桩定位系统,并成功应用于东海大桥等工程;刘绍堂[2]等人阐述了GPS打桩定位系统在杭州湾大桥施工中的应用;姚连璧[3]等人成功研究出GPS的动态定位海上打桩定位的数学模型。港珠澳大桥项目是世纪工程,挤密砂的大量应用在国内尚属首次,打桩定位精度需要严格控制,因此,研究建立稳定性好、使用便捷的海上SCP打桩测量定位系统是迫切需要解决的问题。
1 工程概况
港珠澳大桥西人工岛平面基本呈椭圆形,轴线长度625m,横向最宽处约183 m,面积9.7万m2,工程区域天然水深约-8.0 m,基槽开挖后水深-16.0m。人工岛外围打设挤密砂桩进行软基加固,提高地基承载力。
岛外围挤密砂桩加固处理地基分为12个区,总计9 616根挤密砂桩;沉管隧道过渡段软基加固处理地基分为5个区,总计13 079根挤密砂桩,2 318根普通砂桩。
2 测量定位系统
挤密砂桩船配置一套施工管理系统,能够完成平面定位、高程控制、套管竖直度监测等功能,其中海上SCP施工定位监测系统可进行平面定位并提供实时潮面高程,该系统是在海上GPS打桩定位系统的基础上研发的,其定位原理是根据布置在挤密砂桩船上2台GPS接收机与挤密砂桩船上施工套管中心的几何关系,利用RTK GPS测量方式获得实时高精度三维数据,通过计算确定桩管的三维空间位置,实时显示实际桩位与设计桩位的坐标偏差,定位系统还集成潮位信息自动显示功能,用于指导和监测打桩施工。
2.1 测量设备
工程选用Trimble R7 GPS流动站接收机,配置Zephyr GeodeticTM2型GPS卫星接收天线,通过亚毫米相位中心稳定、强劲的低角度跟踪能力和显著减少地面的多路径能力,实现高质量性能和最优精度。
2.2 挤密砂桩施工测量定位
挤密砂桩施工测量定位时,开启GPS接收机,运行海上SCP施工定位监测系统,进入软件定位界面。
1)建立桩位。依据设计图纸,提前进行挤密砂桩定位参数的内业计算处理,其内容包括:序号、桩位号及X、Y坐标。
2)确定定位参数。选择要打桩的坐标参数文件,单击“打开”添加定位坐标导入软件,如图1所示。
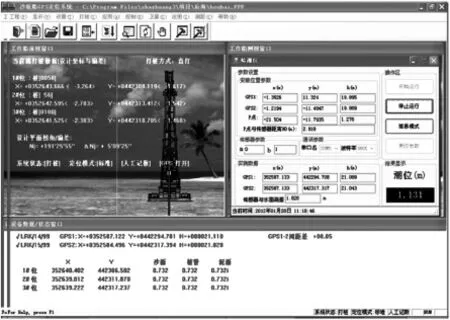
图1 定位系统界面Fig.1 Inter faceofpositioning system
3)施工测量定位。单击“打桩”按钮,选择“选择当前桩号”,输入要打的桩号,然后单击确定,打桩定位系统启动。
2.3 验潮仪的应用
定位系统中集成了潮位仪的使用,即在船舷一侧安装潮位仪,安装位置如图2所示。
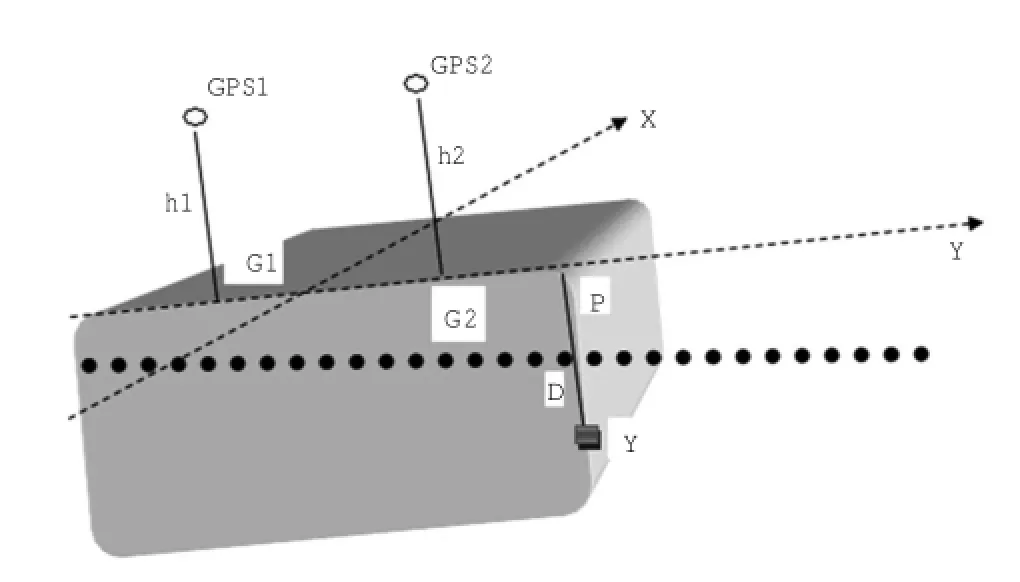
图2 潮位仪安装示意图Fig.2 Sketch ofwater level instrument
通过潮位变化将压力信号传输转换至定位系统软件,实时显示。需要注意验潮仪的安装位置要和GPS的位置在船的同一水平线上,避免因为船体倾斜影响验潮仪的测量结果。
3 海上SCP打桩定位系统校核
3.1 校核目的
为确保挤密砂桩施工时平面位置和高程能够满足设计及规范要求,定期对砂桩船定位系统提供的平面位置和高程进行校核,通过校核偏差确保系统处于正常状态,提高系统精度。
3.2 校核方法
校核方法分为3种,直接测量桩管坐标、间接测量桩管坐标和流动站校核。
1)直接测量桩管坐标
将全站仪转动至视线分别与套管左右两边相切,取两次角度的平均值,即为套管中心所在位置,如图3所示。全站仪操作人员指挥棱镜移至该位置后测量坐标和距离,即可算出1号套管的中心坐标。全站仪直接观测法施测时的困难:套管会随着水流而不停晃动,无法稳定,测量时视线难以准确与套管两边相切。
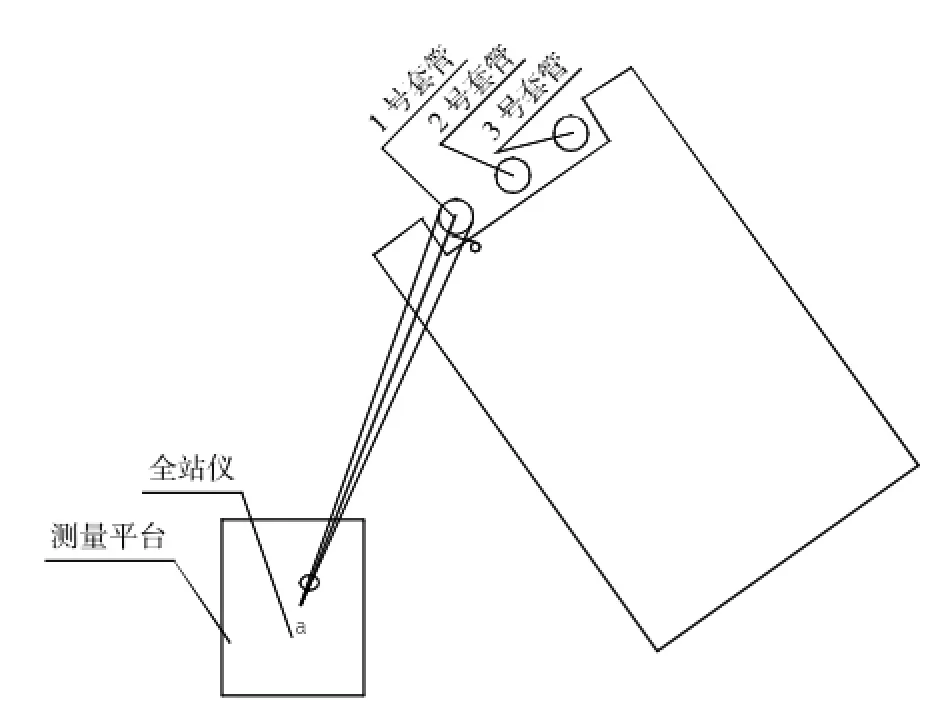
图3 全站仪直接测量校核示意图Fig.3 Sketch ofmeasuring directly by Total Station
全站仪校核潮位:将棱镜头置于船舷边上一点,全站仪测出棱镜高程,用尺量出该点干舷高、棱镜中心至棱镜底部高度,用棱镜高程减去这两数即可得到实时潮位。
计算过程:根据船体位置,设全站仪测得坐标为x',方位角为α',棱镜厚度为d,套管半径为r。则1号套管的坐标为:
x=x'+(d+r)×cos(α'-π)
y=y'+(d+r)×sin(α'-π)
2)间接测量桩管坐标
当全站仪至1号套管之间有遮挡物不通视时,采用间接方法。即通过测量同一船舷边上的前后两点坐标算出船体方位角及套管中心线方位角,从而推算出1号套管坐标,如图4所示。该方法需先量出套管中心线在舷边的点至1号套管中心的距离D。
计算过程:设所测的船舷边两点分别为a和b,坐标分别为Xa,Ya和Xb,Yb,根据船体位置计算,船体方位角α=arctan[(Ya-Yb)/(Xa-Xb)]+π,套管中心线方位角β=α+π/2。
则1号套管的坐标为:
x=Xa+D×cosβ
y=Ya+D×sinβ
3)GPS流动站校核
该方法与全站仪间接测量类似,即用GPS流动站测量船舷边两点坐标,通过这两点计算出船体方位角及套管中心线方位角后推算出1号套管坐标。
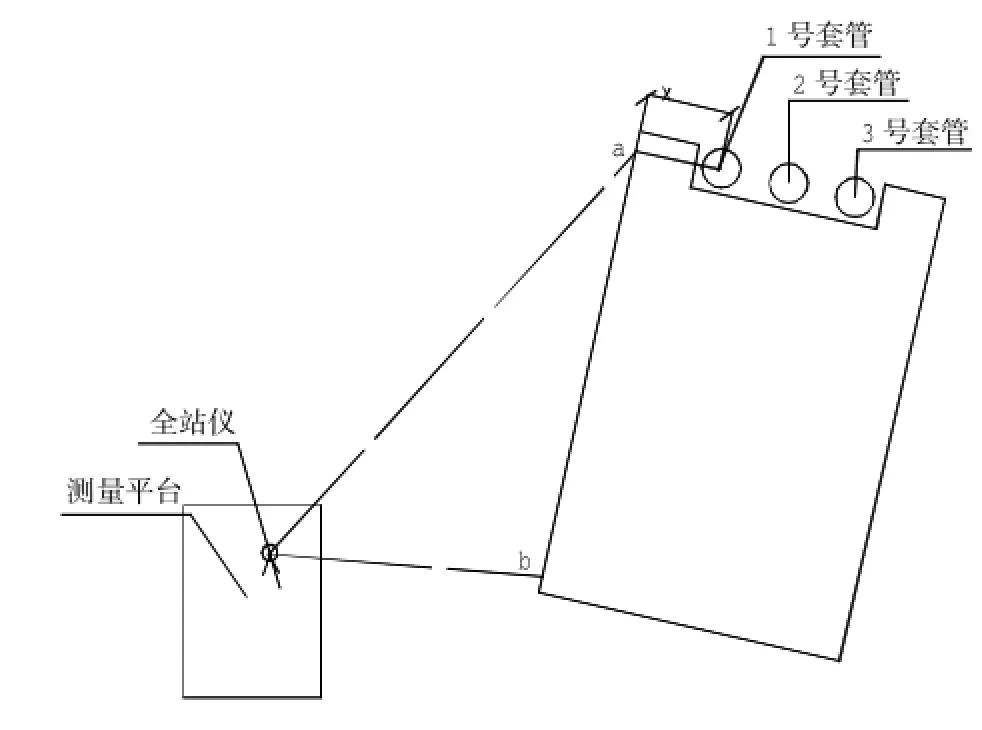
图4 全站仪间接测量校核示意图Fig.4 Sketch ofmeasuring indirectly by Total Station
高程校核:准确量取天线高,将对中杆直立于舷边,测出该点高程,再减去该点处的干舷高,即可得到潮位,再与定位系统显示的潮位进行核对。考虑波浪影响,干舷高不能准确取值,海浪小的情况下,二者差值小于10 cm则认为系统数据准确,若偏差过大,应检查是否数据输入有误。
该方法的缺点:由于GPS天线的仰角比较小,前端桩架比较高,遮挡住卫星,削弱差分信号,影响定位精度。
GPS流动站校核的计算过程与全站仪间接测量校核的计算相同。
潮位校核:设全站仪测得高程为H,棱镜中心到棱镜底部高度为h,放置棱镜处的干舷高度为h',则实时潮位为H'=H-(h+h')。
3.3 测量仪器及精度
挤密砂桩船的定位仪器为Trimble GPSR7,共2台,天线盘分别安置于船尾左右GPS天线架上,动态测量标称精度为平面10 mm+1×10-6D(D为测量距离,mm),高程20mm+1×10-6D。
校核使用的全站仪为索佳SET2X全站仪,测量精度为测角2″,测距±(2mm+2×10-6D)。
4 施工效果
“砂桩3号”经过14个月的施工,在港珠澳大桥西人工岛实际打桩 6 482根,其中挤密砂桩4 526根,普通砂桩1 956根,所有桩位的平面偏差严格控制在±200 mm的设计范围内,表1列出了典型施工的3组数据。
Technology app lication ofm easurement positioning system for sea sand com paction pile
SONG Jiang-wei,MA Zong-hao*
(No.2Eng.Co.,Ltd.ofCCCCFirstHarbor Engineering Co.,Ltd.,Qingdao,Shandong266001,China)
Measurementpositioning system isvery important in sand compaction pile.Combinedwith the sand compaction pile construction in island-tunnel project of Hongkong-Zhuhai-Macao Bridge,we described the princip le ofmeasurementpositioning system,the installation processand theeffectofsand compaction pilesships.It can provide good references for the developmentof piling positioning system.
sand compaction pile;measurement;positioning system;technology application
U655.544;U472.32
A
2095-7874(2015)05-0049-03
10.7640/zggw js201505013
2015-01-11
国家科技支撑计划项目(2011BAG07B002)
宋江伟(1988— ),男,河北邢台人,助理工程师,从事水工测量工作。*通讯作者:马宗豪,E-mail:penguinhao2003@163.com
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18 09:02:36
广东土木与建筑(2022年9期)2022-10-15 08:41:22
武汉理工大学学报(交通科学与工程版)(2022年4期)2022-09-07 12:57:26
福建交通科技(2021年9期)2021-12-28 13:04:08
河北地质(2021年1期)2021-07-21 08:16:12
水运工程(2020年3期)2020-04-09 04:13:28
少儿美术(快乐历史地理)(2020年4期)2020-02-24 13:06:28
学苑创造·A版(2019年4期)2019-05-10 00:19:52
水利水电快报(2019年2期)2019-03-08 09:56:22
水利规划与设计(2017年6期)2017-07-18 10:56:27
