一种红外玫瑰扫描亚图像分辨率提升算法
2014-12-31 11:46:44宋晓东张大鹏
上海航天 2014年2期
宋晓东,张大鹏,孙 静
(上海航天电子技术研究所,上海 201109)
0 引言
红外制导导弹利用目标的红外辐射,通过导引头等红外信号实时探测与信息处理技术和复杂控制系统实现自动瞄准和跟踪。近半个世纪以来,红外制导的研究经历了从红外半自动制导和点源寻的制导向红外成像制导,从单模制导向多模制导的发展过程,技术日趋成熟,已成为精确制导武器的最重要技术手段之一[1]。近年来,红外热成像制导及其相关的微电子、计算机、信号与信息处理等技术发展迅速,为精确制导武器在复杂的地理、气象境和电磁等环境中作战能效实现提供了技术基础[2]。红外玫瑰线扫描亚图像制导是红外热成像制导的一个重要分支,分析红外玫瑰扫描特性,利用导引头现有资源和运算能力,进行系统优化设计,以图形识别替代传统的波形相关识别,将连续一维波形信号转化为二维图像,用图像信息处理算法提升目标识别的分辨率,可充分利用现有导引头的硬件资源,确保目标成像与识别的实时性,同时提高导弹搜索、跟踪目标过程中的抗干扰能力。目前,用于旋转弹的传统玫瑰扫描目标跟踪导引模式定位精度进一步提升已面临瓶颈,而信息采集处理量更大的凝视成像导引在同步解耦、实时性和硬件体系等方面也难以突破。基于红外玫瑰扫描亚图像信息处理的目标定位跟踪是旋转弹精确制导的重要发展方向之一[3]。为此,本文对一种红外玫瑰扫描亚图像分辨率提升算法进行了研究。
1 红外玫瑰扫描体制
为自动跟踪目标过程中引导目标进入导弹寻的器视场中心,导引头对点目标光学大量采用玫瑰扫描方式,因其具有灵敏度高、探测距离远、背景干扰抑制有效等诸多优点,较适于精确制导等实时应用环境[4]。玫瑰扫描架构原理是由光学系统中的主反射镜和次反射镜偏斜一定角度,并各以f1,f2的转速绕光轴反方向旋转,在视场中形成多瓣玫瑰线扫描图形。玫瑰线扫描器的光学元件组成及其基本工作原理如图1所示。

图1 玫瑰扫描光学元件工作原理Fig.1 Photics structure of Rosette-scanning-guide
玫瑰扫描的轨迹极坐标方程为

变换成直角坐标方程形式为
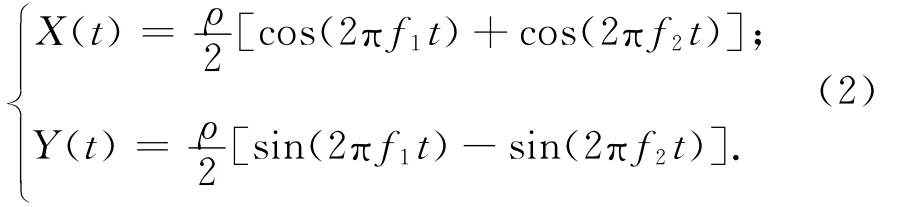
式中:ρ为视场半径。由数学分析可知:玫瑰扫描轨迹方程的几何意义相当于两个大小相等(ρ/2)、旋转方向相反的扫描矢量的叠加。视场中心是玫瑰线交叠最密集处,当目标被导引入视场中心时,每帧玫瑰扫描图像就有隐含目标方位信息的脉冲N个,即使目标处于视场的边缘区,也至少有一个脉冲提供目标方位信息。当瞬时视场沿玫瑰线轨迹扫过目标时,位于系统像平面上的探测器,接收目标辐射(即感应红外能量)而激励出一脉冲信号,探测器输出一维波形信号U(t),经信息解调运算可得时刻t扫描轨迹空间上的位置点(X(t),Y(t))。因探测器的瞬时视场很小,玫瑰扫描线只能周期扫描部分观测视场空间,但采用多瓣扫描方式仍可获得较大的总视场。设弹载计算机的A/D采样间隔为Δt,则玫瑰扫描的采样方程可转换为
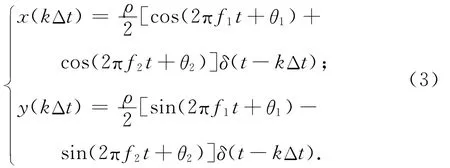
式中:k为采样序列,且k=0,1,2,…;δ(t-kΔt)为冲激响应函数;系统采样频率50kHz;θ1,θ2分别为主反射镜和次反射镜旋转驱动马达的初始相位[5]。
2 红外玫瑰扫描超分辨率亚图像算法
2.1 传统红外玫瑰扫描目标识别过程
导引头系统中传统红外玫瑰扫描信息处理方式是通过脉冲幅度判别、脉冲宽度识别、和脉冲波形关系,判断红外信息的采样峰值,解算玫瑰方程提取目标的红外辐射强度及位置,在此基础上解调识别跟踪目标[2]。该方式几乎只利用了红外玫瑰扫描中采样数据序列的红外脉冲峰值信息,且未利用采样信息点时序中的相互关系及空域中相邻点间相互关联的信息,忽略了背景对目标识别的影响。传统光机扫描到的一维时间信号分析受扫描系统误差影响极大,通过设计阈值门限识别目标所受限制较大,信息利用率较低,且玫瑰扫描本身具多向性和随机性,同一位置上目标会多次在不同方向上被扫描到,但在采样序列中对应的时间间隔长短各异,难以准确确定后续脉冲峰值是否反映的为同一目标,即在时间采样序列中区分多目标(如图2所示)的难度较大。另外受瞬时视场精度的限制,系统的干扰辨识能力也不强。
随着微电子、计算机和信号处理等技术的进步,导引头信息处理平台实时采集和缓冲存储的信息数量与质量有较大提升,不仅包括传统红外玫瑰扫描体制利用红外脉冲峰值信息,而且还有作为背景或噪声去除的大量其他采样点信息。如找到各采样点间的关系以协助解调计算目标位置信息,可进一步提高系统目标定位分辨率和制导精度。近年来弹载计算机硬件普遍有相当大的资源余量,可将一段时间内采样到的基准信号和红外辐射能量信息缓冲存储、处理并叠加后形成亚图像[4]。这是按能级灰度分布的数字图像,基本包含了全部目标和背景的信息,已非常接近低分辨率的红外凝视成像图像。可借鉴成熟的图像目标自动识别检测和处理算法提升红外玫瑰扫描导引系统的性能,提高目标的分辨率,给出目标的数量、形状信息及其他相关信息。

图2 判峰值识别目标Fig.2 Signal apex distinguishing
2.2 亚图像超分辨率处理原理
为提高导弹的打击精度和抗干扰能力,超分辨率处理重点是挖掘亚图像中冗余信息提升导引头目标定位精度与识别能力。因导引头红外玫瑰扫描在空间上是连续的,通过瞬时视场的空间扫描获得红外信息,再经图像数据叠加重建获得含目标位置等信息的亚图像,数据中包含了丰富的信息,目标也被“湮没”其中。本文提出一种基于超分辨率处理的数据挖掘方法,利用瞬时视场的相互覆盖关系进一步确定目标空间位置,并及时将冗余信息“剔除”,避免因瞬时视场 “膨胀”产生的过多冗余信息数据,仅将有用的目标信息从大量信息中“剥离”出,使成像的目标在尺度上更接近真实的目标。某导引头玫瑰扫描的视场1°,瞬时视场0.1°,如图3所示。当瞬时视场光斑1扫描到目标时,整个瞬时视场的红外幅值信息较强,瞬时视场光斑2未扫描到目标,但与光斑1有覆盖重叠的部分,通过集合的差补运算可确定光斑1中的灰色区域也没有目标。另外,还可知道目标在瞬时视场光斑1的区域内,而且只可能出现在光斑1中的阴影区域中,与光斑2相覆盖的灰色区域中没有目标。这样就可缩小目标的搜索范围至0.1°以内。
2.3 ADI超分辨率算法
2.3.1 数学基础
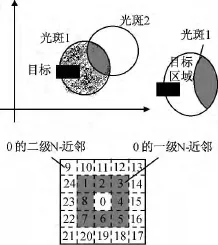
图3 玫瑰扫描光斑覆盖关系和像素点的近邻定义Fig.3 Definiens of Pels-neighbour and Facula-intersection in rosette-scanning-guide
ADI算法主要是利用瞬时视场的相互覆盖关系,通过集合运算去除冗余信息,保留目标的有效信息。

设时刻t1,t2的采 样点分 别为 (x1,y1),(x2,y2),对应的瞬时光斑的集合为

显然,空间分布上S1,S2有相交(S1∩S2为非空)、相切(S1∩S2为空集但边界有共同点)、相离(S1∩S2为空集且边界无共同点)三种关系。
定义2N∈[1~25],以像素点0为中心、位置分布在如图3中数字所示像素,N∈[1~8]时称一级N-近邻;当N∈[9~24]时称二级N-近邻,两者统称为0的近邻。
算法设计中定义瞬时视场集合

一级N-近邻和二级N-近邻平面如图3所示。
2.3.2 ADI算法建模方法
定义3 令函数目标函数

设m=3(瞬时视场的光斑大小为3×3),目标为点目标大小为1×1,目标点集合记为STar,当前视场SA与相邻视场SB的关系如图4所示。分析可知,当前瞬时视场光斑扫描到点目标时,与其相邻瞬时视场光斑的相互关系数学表述为
a)相邻瞬时视场光斑也扫描到同一目标,则目标集合STar=SA∩SB或STar=SA;
b)相邻瞬时视场光斑没有扫描到同一目标,则目标集合STar=SA-SA∩SB,将当前瞬时视场中没有目标的区域去除,为下一步搜索目标减小了搜索区域;
c)当前视场没有扫描到目标时,目标集合为空集,无需处理。
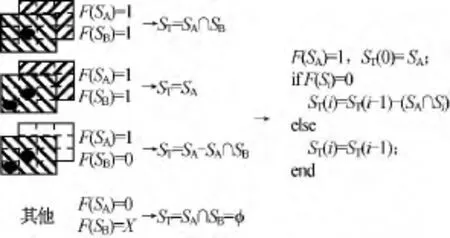
图4 以目标函数F(S)及其瞬时视场集合相互关系为判据建模运算Fig.4 Modeling arithmetic of F(S)based on mutual instantaneous view
由以上分析可知:ADI算法实现超分辨率就是在保留目标信息的条件下尽可能去除冗余信息,SA∩SB中没有目标信息时,用STar=SA-SA∩SB可最有效地去除冗余信息的覆盖关系。与SA相邻能相互覆盖的SB经这种集合关系的运算后所得目标的集合为

若F(SA)=1,F(Si)=1,则说明两个光斑都覆盖到了目标,有

当目标为点目标时,能唯一确定目标在成像图上的位置;当目标不是点目标,是多个像元的集合时,为不丢失目标的信息,需保留当前瞬时视场集合SA中所有目标的信息。
ADI算法基本模型可如图4所示。
2.3.3 ADI信息处理计算机实现
对如图5所示(m=3),目标点集合为ST,当前瞬时视场F(S0)=1。集合SA中所有元素的近邻有25个,故与当前视场相邻的瞬时视场有25个,ADI算法计算过程如图5箭头所示。对扫描到目标的当前瞬时视场来说,通过该算法的运算,将当前瞬时视场中不含有目标信息的像元去除,系统识别的亚图像目标从3×3大小降低到1×1大小的点目标,缩小了目标的搜索范围,提升了目标的识别精度。
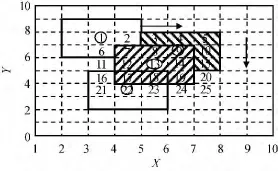
图5 m=3时ADI算法模型Fig.5 Theory of ADI algorithm when m=3
ADI算法利用瞬时视场的时序和空间中的相互覆盖关系可去除系统扫描和重建图像时引入的冗余信息。信息处理过程计算机实现的关键是多帧亚图像信息相互关联的建立与有用信息元素的积累。令Image[n,n]是经导引头玫瑰扫描采集得到的一帧完整像元的集合(此处:n为搜索视场的分辨率)。集合中每个像元包含红外信息灰度值(Image[i,j].value)和计数标志信息(Image[i,j].flag)两种信息,约定Image[i,j].value为1时表示扫描到目标,为0时表示未扫描到目标,为-1时表示背景信息点[4]。
定义4 瞬时视场的大小为m×m个像素点,像素点Image[i,j]为中心、位置分布在(2m-1)×(2m-1)范围内的像素点构成的集合称为Image[i,j]的能覆盖近邻集UJ(Image[i,j]),且

ADI信息处理计算机实现过程分步骤如下。
S1:初始化搜索图集合Image[n,n],图像集合的每个像元初 始化:Image[i,j].value= -1,Image[i,j].flag=0。此处:i,j为时刻t玫瑰方程离散化的整数型坐标。
S2:建立玫瑰扫描信息索引图,将经过采样量化后的玫瑰扫描红外信息灰度值保存到成像存储空间Image[n][n]中。
a)如玫瑰线扫描到目标,对应的空间像元Image[i,j].value=1;
b)如玫瑰线未扫描到目标,对应的空间像元Image[i,j].value=0。
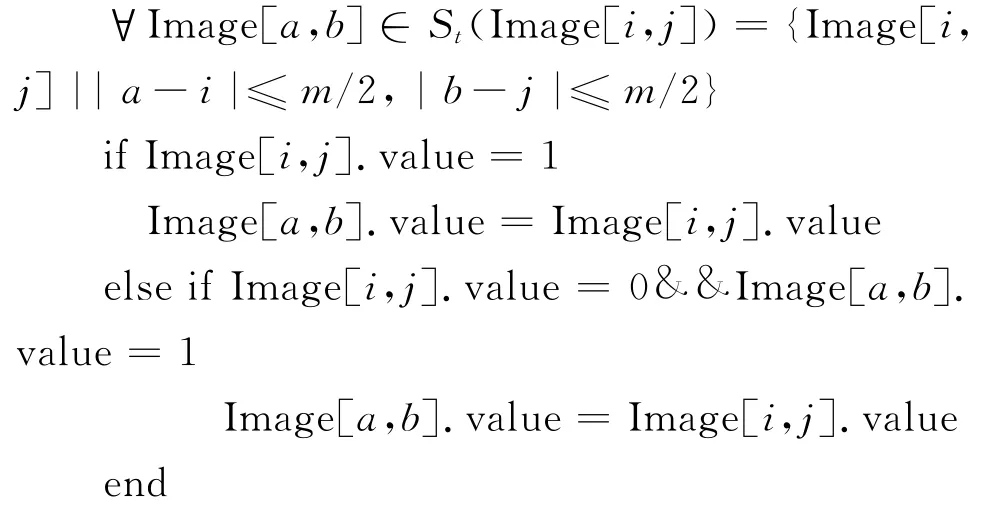
S3:图像重建,恢复瞬时视场信息,得到完整的扫描亚图像。恢复索引图采样像元对应的瞬时视场信息,将瞬时视场集合St(Image[i,j])内Image[i,j]的近邻Image[a,b]均置为与Image[i,j]相同的属性值,且目标信息的优先级最高,不能被覆盖。
S4:超分辨率处理。从重建后亚图像的初始像元Image[1][1]开始对非背景点遍历,判断F(S(Image[i,j]))是否为1,
S4.1否,继续计算下一个像元,转S4;
S4.2是,初始化当前瞬时视场中的目标集合STar=S(Image[i][j]),初始化能覆盖近邻集UJ(Image[i][j]);F(S(Image[i,j]))=1,判 断S(Image[i][j])与其近邻光斑集合的相互覆盖关系,∀u(k)∈UJ(Image[i,j]),判断F[S(u(k))]=0?
S4.2.1是,S(u(k))没有覆盖到目标。令
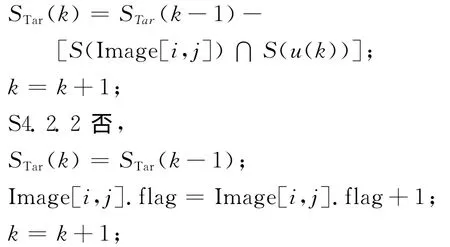
S5:结束,显示处理。
3 ADI算法仿真与分析
将解算玫瑰方程得到的数据导出存储到二维矩阵中,仿真分析ADI超分辨率算法处理效果。设玫瑰扫描的基准频率分别为f1=100Hz,f2=275Hz,图像分辨率81×81,瞬时视场为搜索视场的约1/10,此时玫瑰扫描的视场覆盖率达到90%以上。
对通过峰值判断方式识别目标的方法来说,无法识别出视场中的多目标,抗干扰能力差。传统扫描所得亚图像识别出的多目标效果亦不佳。相应仿真分析结果如图6所示。由图可知:经超分辨率处理后的亚图像能明显分辨出多目标,且识别出目标的精度可相应提高,特别是对处于视场中心的目标能完整地表现目标的形状及细节信息。当导弹为旋转弹时,还需考虑飞行过程中导弹旋转对算法实现的影响。相对弹体坐标系,目标在导弹的矢量方向空间域上是旋转的,每帧扫描线相对扫描到的目标会发生一定的偏移[5]。设弹旋频率0~15Hz,相邻帧受弹旋影响产生的相位差为30°,因两帧中的目标扫描线不同,目标在重建后的成像图中必有变化。因玫瑰扫描整个探测视场的密度不同,故受弹旋影响整个扫描图形会相对目标发生旋转,相邻帧获得的目标信息存在较多不同,但多帧中信息可相互补充。可见,相邻帧间的目标扫描、重建和超分辨率处理存在差异,这是由玫瑰扫描的不均匀性和不完整性造成的。但鉴于相邻帧间的时间间隔较小,图像的相关性较强。可利用相邻帧间的差异采用多帧积累技术再现较完整的目标形状和位置。
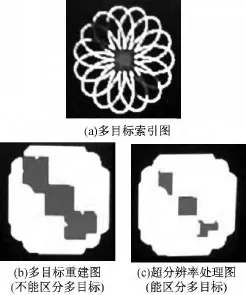
图6 超分辨率处理后的图像(能区分多目标)Fig.6 Resultant image after resolution enhancing process(multi-target could be treated)
多帧积累玫瑰扫描索引图像如图7所示。由图可知:利用帧间扫描的不重复性,通过累加获得更多的目标信息,目标的基本轮廓已显现,原图中的目标基本被采样。这样经超分辨率处理目标与原始目标的形状较接近,且对多目标的区分更明显。系统固有的扫描参数的随机性变化,亦为这种叠加效果提供了可能。采用多帧扫描积累,能显著提高采样空间的面分辨率,利于对目标的分割、识别和跟踪。
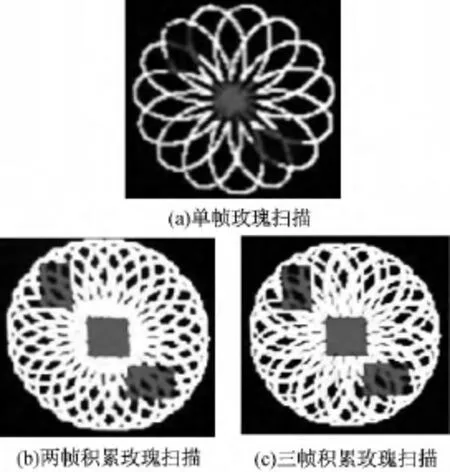
图7 多帧积累玫瑰扫描索引图像Fig.7 Mapping amassment for multi-frame image
玫瑰扫描轨迹方程中的光机马达频率f1,f2是两个重要参数,决定了玫瑰扫描图形花瓣的多少、大小、重叠程度,以及玫瑰扫描图案的帧频。图像重建是基于玫瑰扫描图案和瞬时视场,当系统f1=275Hz,f2=100Hz,瞬时视场为搜索视场1/10时覆盖率可达90%以上;当系统f1=290Hz,f2=70Hz,瞬时视场为搜索视场1/30时覆盖率可达90%以上[2]。7(275Hz,110Hz)瓣玫瑰线m=12处理仿真结果如图8所示。由图可知:致密的玫瑰线图形,只需很小的瞬时视场就能完全覆盖搜索视场,获得足够的目标信息,不易漏扫目标,且超分辨率处理效果好。当玫瑰图形的花瓣数较少,盲区很大时要求有大瞬时视场才能达到高覆盖率,提高目标识别的概率。
当瞬时视场较小时,ADI算法能很好地区分多目标,且无需多帧积累就能有好效果。但当亚图像中有很大的盲区块时,获得的关于目标的信息很少,经ADI算法处理后,超分辨率图像中的目标不完整,需通过多帧积累的技术,不同扫描图形周期获得的目标信息重构完整的目标。

图8 7(275Hz,110Hz)瓣玫瑰线m=12处理图Fig.8 Flow image of 7(275Hz,110Hz)rosette-scanning with m=12
仿真分析,对红外玫瑰扫描亚图像ADI算法可实现对目标的超分辨率,能较好地提高目标的识别精度,区分多目标,与传统扫描成像相比能更早发现区分多目标,提高了红外制导系统抗干扰的能力。传统制导系统的瞬时视场为搜索视场约1/10时,对多目标和干扰区分效果不佳,甚至无法区分多目标。两种方法比较如图9所示。由图可知:ADI算法能在大瞬时视场中较好地区分多目标。

图9 传统扫描成像与超分辨率亚图像区分多目标结果Fig.9 Multi-target identification of traditional rosettescanning and sub-image resolution enhancing
传统扫描成像经超分辨率处理,去除了关于目标的很多冗余信息,在超分辨成像的图像中,目标较传统扫描成像更清晰,更接近目标的真实特征,且随着瞬时视场的增大,ADI算法的超分辨率处理效果更明显。
4 结束语
本文对红外玫瑰扫描亚图像超分辨算法原理和仿真过程进行了研究。仿真分析和算法论证表明:通过红外玫瑰扫描超分辨率亚图像数据ADI运算实现超分辨率处理可行,根据玫瑰扫描特点,在传统扫描成像的基础上利用瞬时视场的相互覆盖关系,ADI算法能在去除目标相关冗余信息的同时,实现对红外玫瑰扫描亚图像的超分辨率处理,达成目标定位精度提升和有效区分多目标。因单帧亚图像获得目标信息有限,还可通过多帧积累配准的方式取得更多的有用信息,即经过对一段时间内导引头所采集亚图像数据缓冲积累和及时分析挖掘,进一步提升导引头的目标精确定位和抗干扰能力。
[1] 王伟建,黄雄哲,黄健新,等.紫外/红外准成像双色导引头技术研究[J].上海航天,2003,20(1):1-5.
[2] 顾宪辉,鲍其莲.红外成像寻的器技术研究[J].应用光学,2007,28(3):309-312.
[3] 叶尧卿.便携式红外寻的防空导弹设计[M].北京:宇航出版社,1996.
[4] 王茜蒨,刘敬海,林幼娜.多元探测器在玫瑰扫描红外亚成像系统中的应用[J].光学技术,2002,28(2):1-4.
[5] 张宏俊.红外/紫外双色玫瑰扫描导引系统建模及数字仿真[J].上海铁道大学学报,2000,21(6):148-151.
猜你喜欢
都市(2023年6期)2023-12-28 07:56:54
诗歌月刊(2023年1期)2023-03-22 14:06:24
中国光学(2021年6期)2021-11-25 07:48:32
阅读(高年级)(2019年9期)2019-11-15 07:22:54
阅读与作文(小学高年级版)(2019年8期)2019-10-16 04:46:50
中国医疗设备(2019年1期)2019-01-15 12:10:54
制导与引信(2016年3期)2016-03-20 16:01:58
火控雷达技术(2016年1期)2016-02-06 02:18:01
激光与红外(2015年10期)2015-03-23 06:07:18
弹箭与制导学报(2015年1期)2015-03-11 15:32:08