
三相电压型PWM整流器的双滑模控制方案研究
2014-12-28 06:15:38郑宏伟饶益花陈文光
电源学报 2014年1期
郑宏伟,饶益花,陈文光
(1.南华大学电气工程学院,湖南衡阳 421000;2.南华大学数理学院,湖南衡阳421000)
引言
三相PWM电压型整流器输入电流谐波小、输出电压稳定、能实现单位功率因数运行和能量双向传输,具有很好的工业应用价值。但由于PWM整流器是一个强非线性系统,故采用常规的线性控制方式(如PI调节器)难以达到理想的控制效果,动态性能差且参数调节复杂。滑模控制是解决非线性系统控制问题的重要方法之一,因抗干扰能力强、动态响应速度快等优点受到各国控制研究学会的广泛关注[1]。滑模控制在本质上是一种不连续控制,它要求快速地切换系统的控制状态,具有高频开关特性。这与PWM整流器开关器件工作在高频 “开―关”模式相对应,因此滑模控制很适合应用于PWM整流器系统的控制。
大部分基于滑模控制的三相PWM整流器,电压外环采用滑模控制,电流内环采用非滑模控制的线性或非线性控制方法[2-12],并采用空间向量脉宽调制(SVPWM)技术对输入信号进行调制以产生开关器件控制脉冲,设计和实现较为复杂,且对系统整体的动态响应速度和鲁棒性造成影响。本文提出电压外环、电流内环均采用滑模控制的双滑模控制方案,以简化设计和实现,并保证整个系统具有良好的鲁棒性和动态性能。运用Matlab中的Simulink和SimPowerSystems搭建了系统仿真模型,对双滑模控制方案和电压外环采用滑模控制、电流内环采用PI控制方案进行对比仿真,结果验证了双滑模控制方案的可行性与优越性。
1 三相电压型PWM整流器数学模型
三相电压型PWM整流器的主电路拓扑结构如图1所示。R和L为交流侧电感等效参数,C为直流侧支撑电容,RL为直流侧负载电阻。 其中,ua、ub、uc为PWM三相控制电压。
假设ea、eb、ec为三相对称交流电源,应用基尔霍夫定理可得三相电压型PWM整流器在三相静止坐标系下的数学模型为
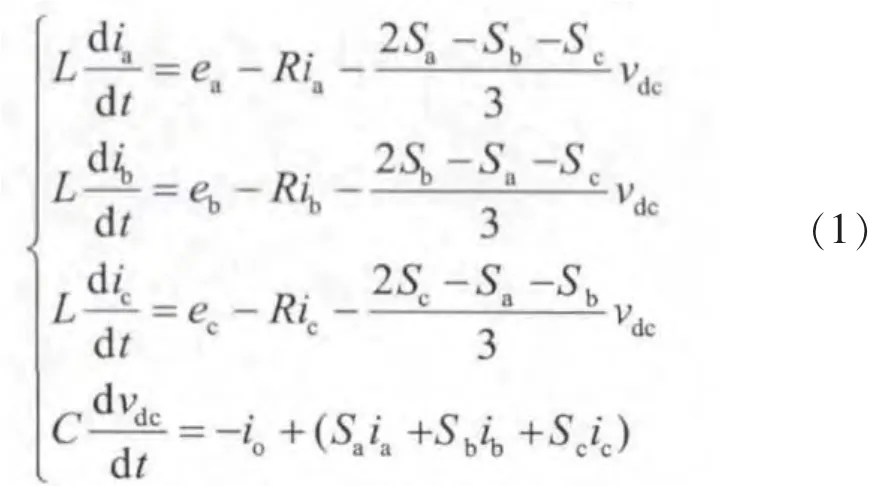
式中,Sa、Sb、Sc分别表示三相桥臂开关管的开关函数。其中:S=1,代表对应的上桥臂开关管导通,下桥臂开关管关断;S=0,代表对应的下桥臂开关管导通,上桥臂开关管关断。通过“等功率”坐标变换,将三相静止坐标系中的变量变换到两相旋转d-q坐标系中,数学模型改为
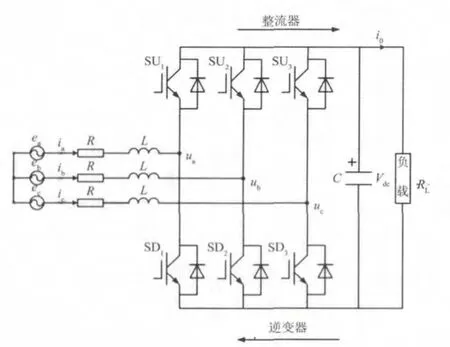
图1 三相电压型PWM整流器的主电路拓扑结构
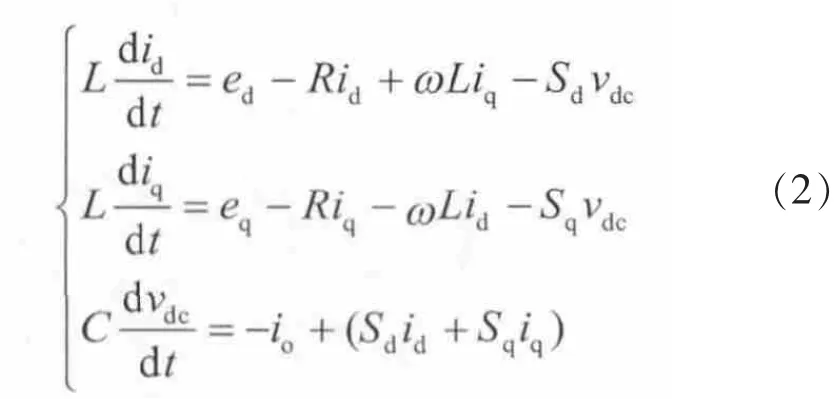
式中:Sd、Sq分别表示三相桥臂开关管在d-q坐标系下的开关函数;ed、eq和id、iq分别为电网侧交流电压和电流的d、q分量;ω为角频率。
2 滑模控制系统的设计
2.1 基于滑模控制的电压外环设计
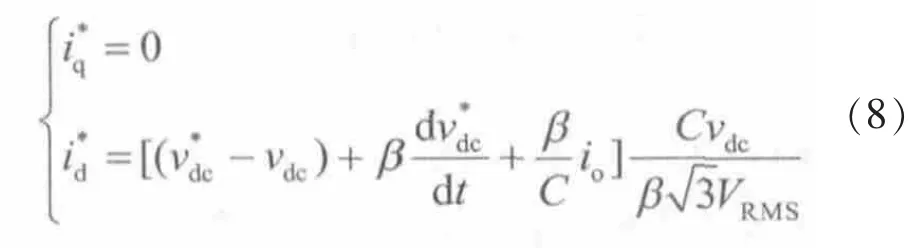
三相电压型PWM整流器有两个自由度Sd、Sq。其中,Sd用于控制直流侧输出电压vdc;Sq用于控制输入功率因数。对输入功率因数的控制可转换成对输入无功电流iq的控制,当控制iq=0时,PF=1。滑模控制的目标是整流器输入单位功率因数(即输入无功电流跟踪给定无功电流i*q=0)和输出电压vdc跟踪给定电压,属于非线性系统的跟踪问题。根据文献[1-3,13]设计滑模面

将式(5)代入滑模函数 s2(evdc,eθ,t)得

结合式(3)、式(5),得到系统的滑模函数为
其中
2.2 基于滑模控制的电流内环设计
根据参考文献[14],可定义电流内环的滑模函数为
其中,ia、ib、ic为交流侧各相电流;为交流侧各相电流参考值,由电压外环滑模控制得到的通过两相旋转d-q坐标系向三相静止坐标系变换得到;eid、eib、eic为跟踪误差电流。根据滑模控制可达性条件 ss>0[15]和式(1)、式(9)有
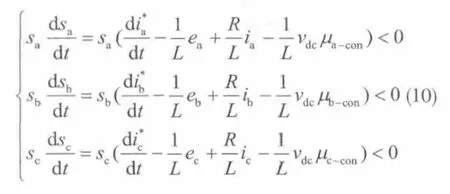
其中,μx-con(x=a,b,c)分别为 a、b、c 三相的控制作用,使所有运动轨迹于有限时间内到达滑模面[16]。
电流内环采用滑模变结构控制的等速趋近律[15]

kx为电流环滑模控制系统的设计参数,只需满足

即能保证系统满足滑模控制可达性条件。假设滑模函数满足 sa<0,sb<0,sc>0,由式(1)、式(10)和式(11)得
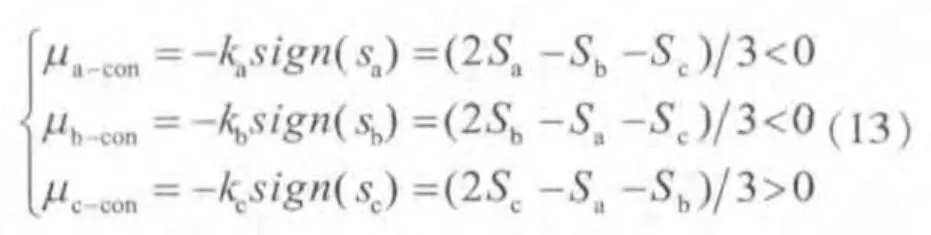
满足以上不等式方程组的开关模式只有(1,1,0)。依此类推,可以得到不同情况的滑模函数组合对应的开关模式,如表1所示。当系统进入滑动模态时,开关可根据需要适当工作在零矢量 (0,0,0)或(1,1,1)模式,以减少开关切换次数。 同时,考虑采用变趋近律的滑模控制方式(如指数趋近律、幂次趋近律[15]),让运动点在离滑模面较远时,采用较大的趋近律,缩短调节时间,提高动态响应速度;在接近离滑模面时,采用较小的趋近律或零趋近律,从而大大降低系统进入滑动模态时开关的切换频率。综合采用上述方法,既可有效减少开关损耗,提高系统工作效率;又可减弱滑模控制系统的“抖振”现象[15],提高系统的可靠性。
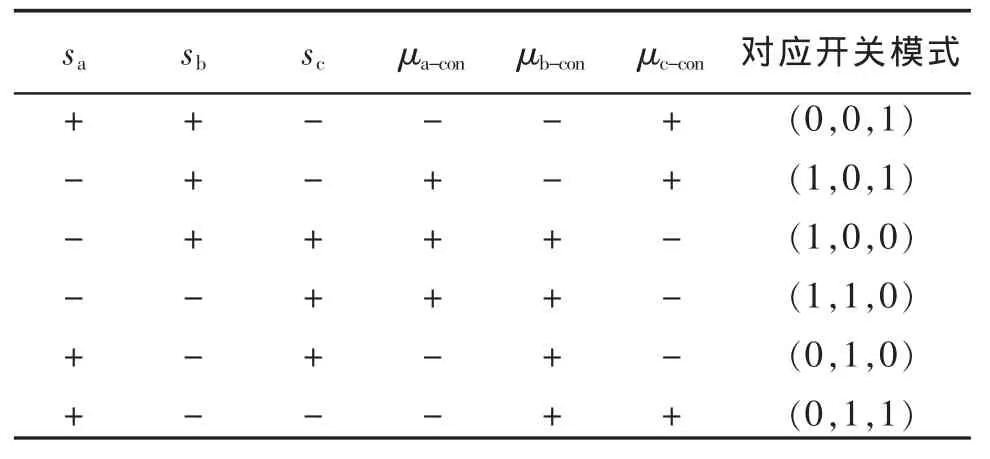
表1 滑模控制规律
3 仿真结果及分析
本文在Matlab/Simulink环境下搭建的三相PWM整流器系统的仿真模型如图2所示。其中,output_voltage_control_loop模块是电压外环控制模块,根据第3.1节设计的滑模控制算法搭建;input_current_control_loop模块是电流内环控制模块,分别采用第3.2节设计的滑模控制算法和PI控制算法搭建,以进行对比仿真。系统整体控制原理图分别如图3、4所示。设计系统主要参数为:直流电压700 V,交流三相电压380 V,功率等级为7.5 kW,开关频率为10 kHz,网侧滤波电感9.5 mH,直流支撑电容1 000 μF,β=0.01。电流内环采用PI控制时,设置kp=500,ki=100。进行仿真并比较、分析仿真结果。
采用双滑模控制时,仿真可得到电流内环滑模函数sa的曲线以及对应的A相上桥臂开关管的控制脉冲,用以分析滑模控制工作原理。由图5、6可知,当t在0.01 s附近时,系统进入滑动模态。此时,滑模函数在滑模面附近作高频运动,对应生成开关器件的高频控制脉冲,按滑模控制规律快速切换开关器件的“开”、“关”状态,从而实现对PWM整流器网侧输入电流以及直流侧输出电压的实时控制。
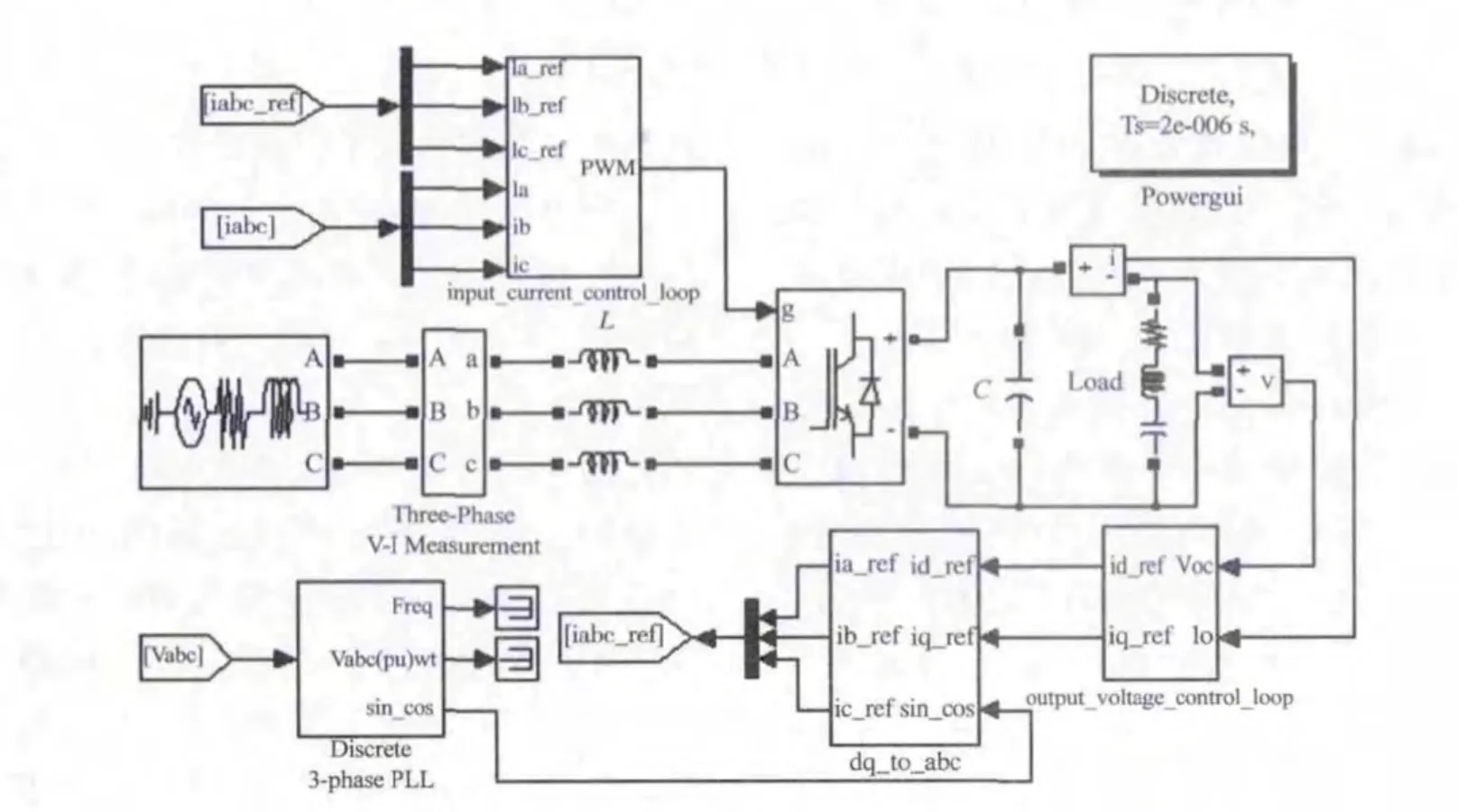
图2 三相电压型PWM整流器系统模型

图3 三相电压型PWM整流器控制原理图(双滑模控制)

图4 三相电压型PWM整流器控制原理图(电流内环采用PI控制)
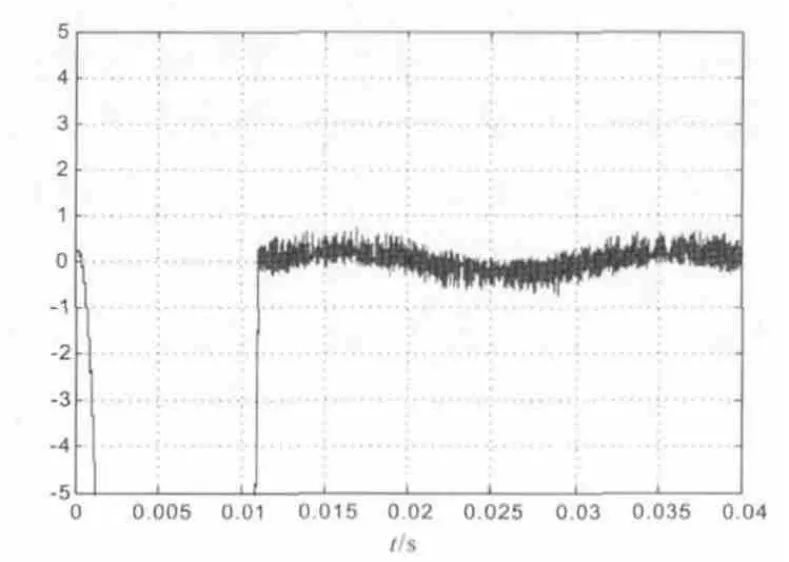
图5 滑模函数sa的曲线
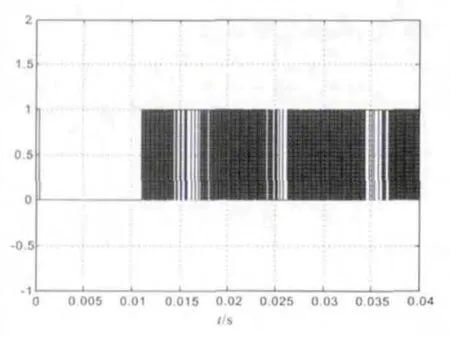
图6 A相上桥臂开关管控制脉冲
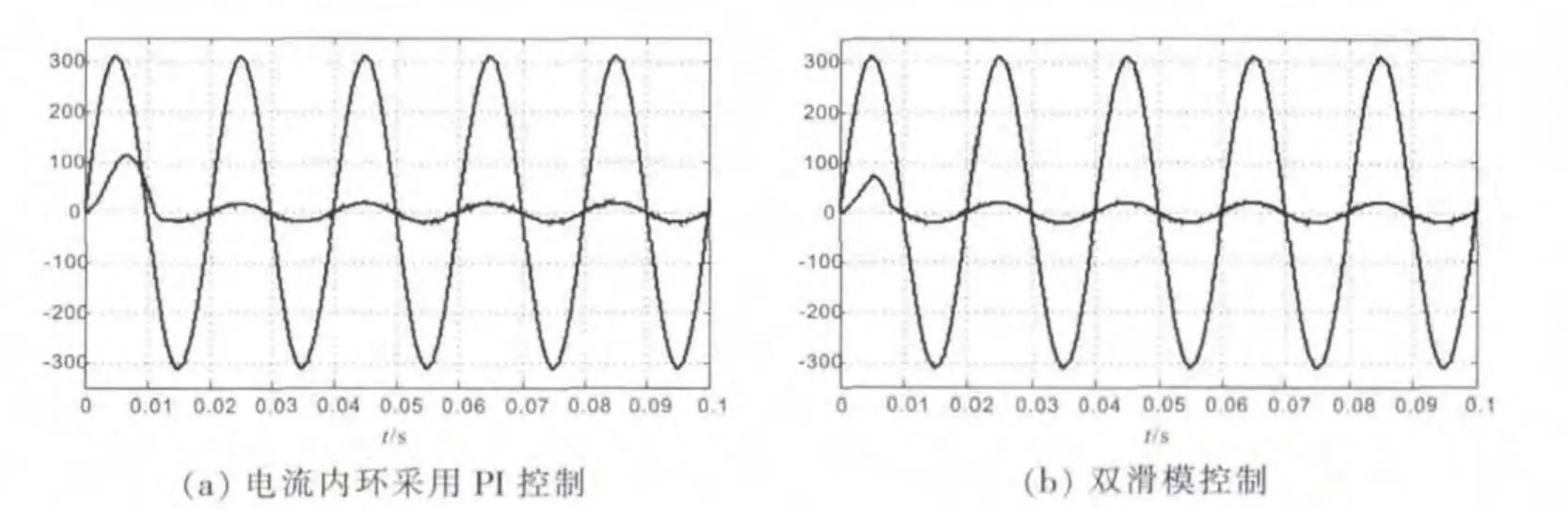
图7 A相电压和电流波形
图7 为A相电压和电流波形。比较图7(a)、(b)可知,采用双滑模控制可提高交流侧电流跟踪电压的速度,降低系统未进入滑动模态时交流侧电流峰值,这对降低开关器件参数要求、节约成本有利。
图8 为A相电流谐波含量分布图。由图7可知,交流侧电流均能够完全跟踪电压,位移因子cosα=1。 由图 8(a)可知,A 相电流总谐波畸变 THD=4.42%,功率因数由图8(b)可知,A相电流总谐波畸变THD=0.67%,功率因数,几乎为 1,实现网侧电流单位功率因数控制。
图9 为直流侧电压动态响应波形。比较图9(a)、(b)可知,采用双滑模控制时,输出电压动态响应快速,在t=0.01 s时已达到稳定状态,无超调量且无稳态误差。
图10 为网侧电压由额定电压变为150%额定电压时直流电压的动态响应波形(t=0.2 s),图11为直流电压指令由700 V变为600 V时直流电压的动态响应波形(t=0.2 s)。比较图 10(a)、(b)和图 11(a)、(b)可知,采用双滑模控制时,直流侧电压波动小,恢复稳定状态所需时间短,证明双滑模控制的PWM整流器系统具有更优越的鲁棒性和动态性能。
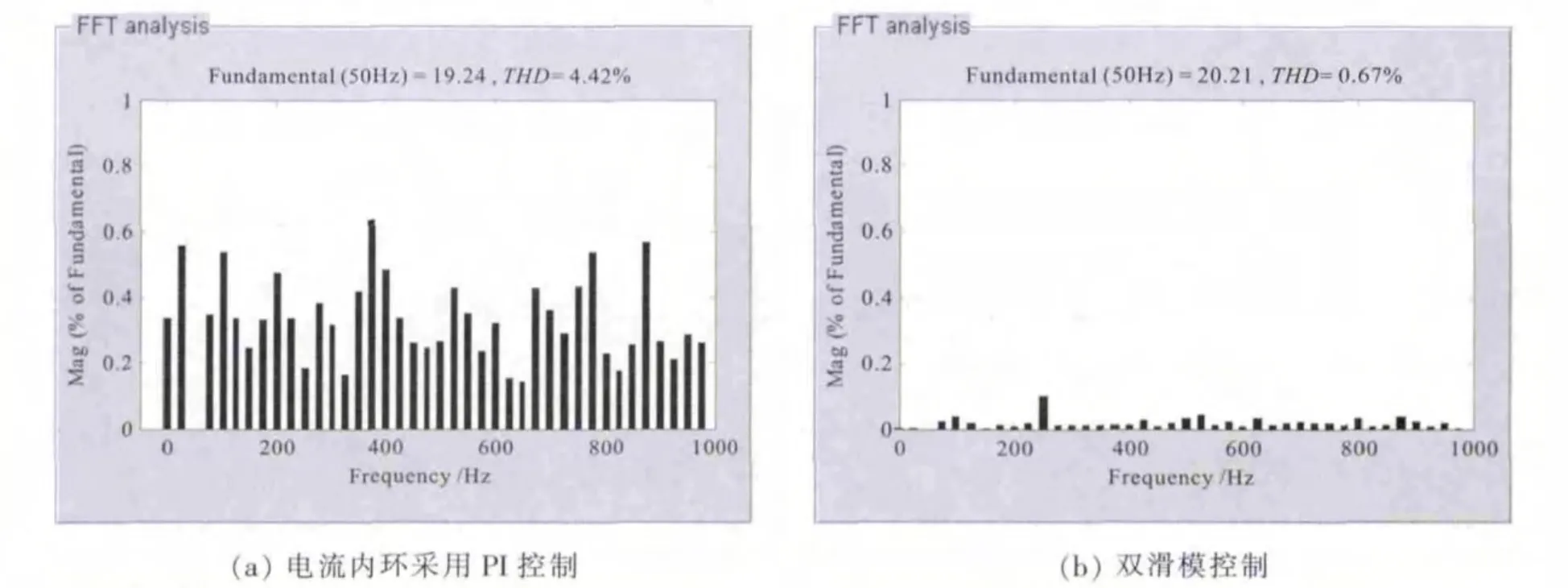
图8 A相电流谐波含量分布图
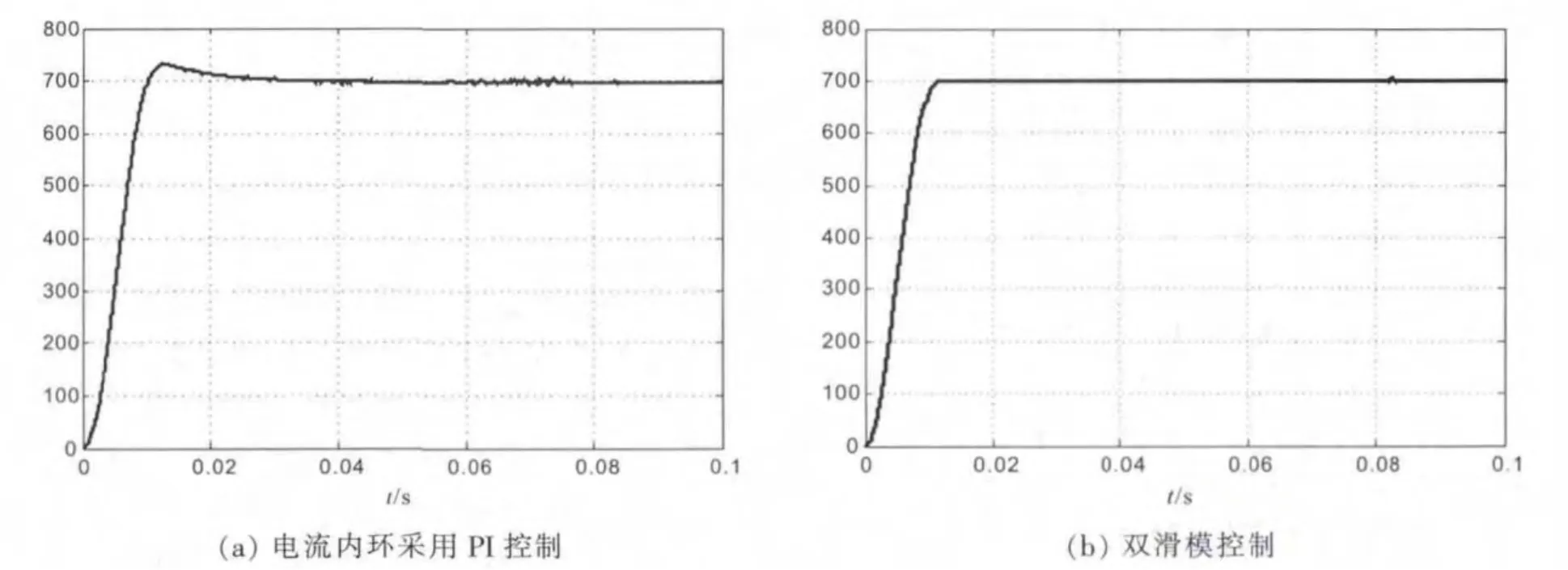
图9 直流侧电压动态响应波形
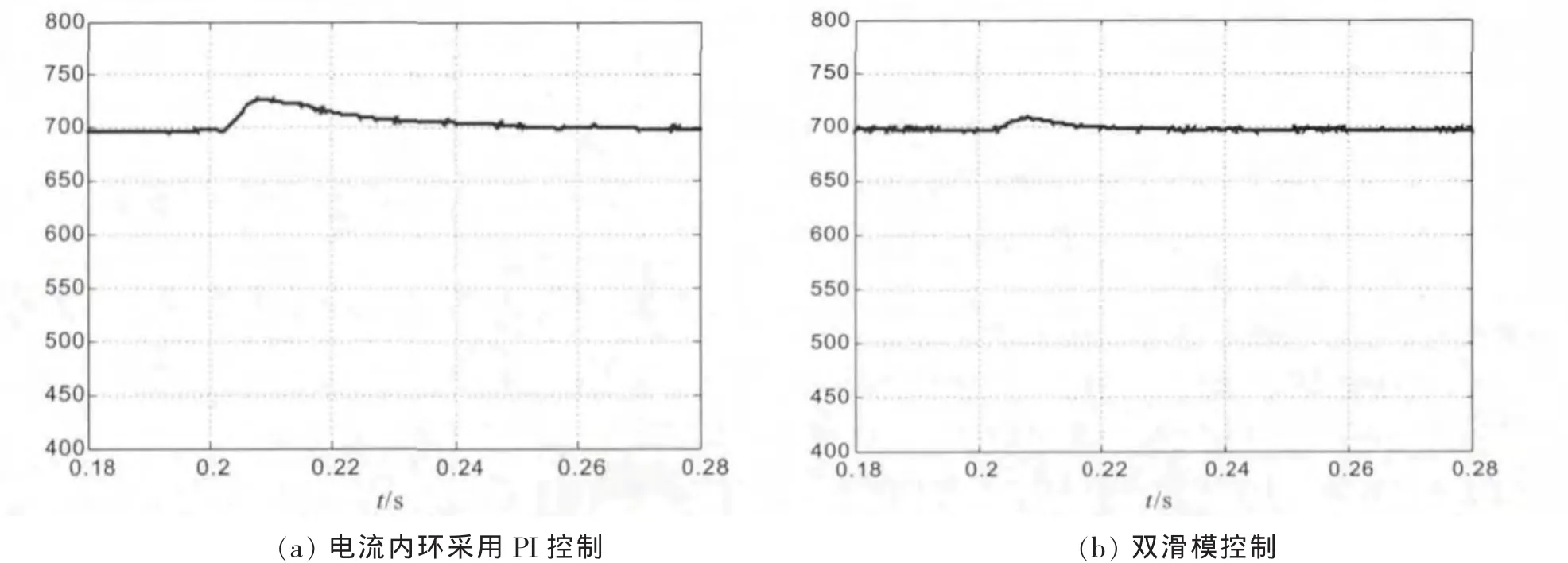
图10 网侧电压由额定电压变为150%额定电压时直流电压的动态响应波形(t=0.2 s)
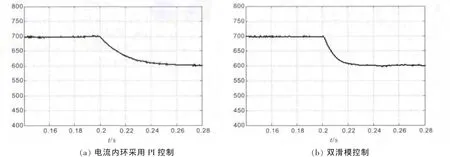
图11 直流电压指令由700 V变为600 V时直流电压的动态响应波形(t=0.2 s)
4 结论
为简化三相电压型PWM整流器的设计和实现,提高整体系统的动态性能和鲁棒性,本文提出了一种电压外环、电流内环均采用滑模控制的双滑模控制方案,并详细介绍了滑模控制系统的设计过程。最后,在Matlab/Simulink中搭建了系统仿真模型,对双滑模控制方案和电压外环采用滑模控制、电流内环采用PI控制方案进行对比仿真。仿真结果验证了双滑模控制方案的可行性与优越性,具有工业应用价值。
[1]Young K D,Utkin V I,Ozguner U.A control engineer's guide to sliding mode control[C].IEEE International Workshop on Variable Structure Systems,1996:1-14.
[2]Silva J F.Sliding mode control of voltage sourced boosttype reversible rectifiers[C].IEEE International Symposium on Industrial Electronics,1997,2:329-334.
[3]Silva J F.Sliding-mode control of boost-type unity-powerfactor PWM rectifiers[J].IEEE Transactions on Industrial Electronics,1999,46(3):594-603.
[4]Zhang Z,Xie Y,Le J,et al.Decoupled State-Feedback and Sliding-Mode Control for Three-Phase PWM Rectifier[C].Power and Energy Engineering Conference,2009 Asia-Pacific.IEEE,2009:1-5.
[5]Wang W,Yin H,Guan L.A direct power control scheme for three-phase PWM rectifiers based on sliding-mode variable structure control theory[C].IEEE International Conference on Power Electronics and Drive Systems.2009:837-842.
[6]HUANG K,WANG W,WANG X.Modeling and Simulation of PWM Rectifier Based on Sliding-Mode Control[J].Power System Technology,2009,8:005.
[7]Fan W,Bao G.PWM rectifier research based on sliding mode variable structure control[C].Control and Decision Conference,2011 Chinese.IEEE,2011:675-679.
[8]Kim J H,Jou S T,Choi D K,et al.Direct Power Control of Three-Phase Boost Rectifiers Using a Sliding-Mode Scheme[J].Journal of Power Electronics,2012,12(4).
[9]汪万伟,尹华杰,管霖.三相电压型PWM整流器的反馈线性化和滑模控制[J].华南理工大学学报 (自然科学版),2009,37(11):83-87.
[10]帅定新,谢运祥,王晓刚.三相 PWM整流器混合非线性控制研究[J].中国电机工程学报,2009(12):30-35.
[11]洪庆祖,谢运祥.基于滑模控制的 PWM整流器的研制[J].电力电子技术,2012,46(1):35-36.
[12]黄辉先,汤湘宁.基于模糊滑模控制的三相 PWM整流器仿真[J].电源技术,2013,37(005):836-839.
[13]Silva J F.Sliding Mode Design of Control and Modulator Electronics for Power Converters[J].Journal of Circuits,Systems,and Computers,1995,5(03):355-371.
[14]周卫平,吴正国,刘大明,等.有源电力滤波器变趋近律滑模变结构控制[J].中国电机工程学报,2005,25(23):91-94.
[15]高为炳.变结构控制的理论及设计方法[M].北京:科学出版社,1996.
[16]张兴,张崇巍.PWM整流器及其控制[M].北京:机械工业出版社,2003.
猜你喜欢
包装工程(2023年16期)2023-08-25 11:39:16
科学家(2021年24期)2021-04-25 17:55:12
石油沥青(2021年1期)2021-01-11 05:41:31
中医眼耳鼻喉杂志(2019年2期)2019-04-13 05:23:50
腹腔镜外科杂志(2016年11期)2016-06-01 12:10:09
腹腔镜外科杂志(2016年12期)2016-06-01 12:10:09
通信电源技术(2016年4期)2016-04-04 02:57:16
电源技术(2015年1期)2015-08-22 11:16:26
焊接(2015年5期)2015-07-18 11:03:41
电测与仪表(2015年12期)2015-04-09 11:44:44
