
基于DSP28335的七相感应电机矢量控制
2014-12-28 06:15:26郭冀岭邱忠才
电源学报 2014年1期
郭冀岭,肖 建,邱忠才,罗 鹏
(西南交通大学电气工程学院,四川 成都610031)
引言
与传统三相电机调速系统相比,多相电机调速系统可用低压功率器件实现大功率,可以减小转矩脉动,可以采用相冗余提高驱动系统可靠性。七相感应电机因缺相运行的多种情况具有代表性受到学者关注[1]。
文献[2]给出了按照对双三相感应电机提出的矢量空间解耦方法来进行建模的多相电机数学模型,具体到七相感应电机,其空间解耦模型包含基波子空间和3次、5次谐波子空间,基波子空间基波分量形成旋转磁场和转矩,故其控制方法仍和普通三相电机类似,通过矢量控制[1]或直接转矩控制[3]对控制基波子空间中d、q分量。除基波子空间外,谐波子空间高次谐波分量会引起较大定子谐波电流和损耗,一般通过PWM调制方法来抑制或消除。电流滞环调制方式[4]谐波消除效果取决于参考电流和滞环宽度,开关频率不固定,开关损耗大;将传统三相SVPWM类似调制方法移植到七相上,会产生很大谐波电流[1];文献[5]推导出多相系统基于载波的统一电压调制(UVM)方法,但并未考虑消除谐波问题;文献[6]基于空间解耦思想,注意到电压矢量在基波子空间作用的同时,其投影在谐波子空间内也会产生合成矢量,提出了一种通过调节有效矢量作用占空比减小谐波子空间中合成矢量以消除谐波的七相逆变器SVPWM方法 (以下简称七相SVPWM法),但该法需针对参考矢量不同扇区选择特定矢量,通用性不强,且只对七相对称RL负载进行了分析。
本文采用七相空间解耦模型,采用转子磁链定向矢量控制方法对基波子空间的磁链和转矩进行解耦控制,针对定子电流谐波,提出消除谐波的七相载波型UVM(电压统一调制[7])方法,该法将空间解耦模型与七相载波型UVM相结合同时追加谐波空子间电压为零的约束条件,并通过电机闭环控制实现。
随着电机相数的增加,PWM驱动信号成倍增加,对控制器的运算速率要求更高,因此很多文献采用了 DSP+FPGA[5]或 DSP+CPLD架构[8],结构复杂,本文采用了浮点运算能力强、硬件资源丰富的DSP芯片TMS320F28335为处理器,构建了七相感应电机矢量控制系统平台,对所提出的控制方法进行了验证,并对消除谐波型UVM调制方法和七相SVPWM法的定子电流消除谐波效果进行了对比。
1 七相感应电机空间解耦模型及空间电压矢量分布
1.1 七相感应电机空间解耦模型
针对七相感应电机这样一个高阶、非线性、强耦合系统,根据文献[2]针对双三相感应电机时提出的矢量空间解耦方法,从不同谐波子空间角度建立七相感应电机的模型。对于七维向量:

分别令 k=1,3,5,7 和 ωt=0,π/2,可得 7 相自然坐标系到α-β坐标系静止坐标变换阵[T7s],如式(2)。矩阵前两行对应基波子空间(α-β),电机变量中基波和14k±1(k=0,1,2...)次谐波都被映射到该子空间上,形成旋转磁场,参与机电能量转换;3和4行、5和6行分别对应3次谐波子空间(z11-z12)和5次谐波子空间(z21-z22),14k±3 次谐波和 14k±5 次谐波被分别映射到这两个子空间上,不产生旋转磁场,但会产生谐波电流;矩阵的最后一行对应零序子空间,7k次谐波被映射到该子空间上 (定子7相Y接可忽略该空间)。

由于能量转换只发生在基波子空间,在进行旋转坐标变换时,只需将该子空间中的矢量旋转即可,其余子空间中变量保持不变。这样得到总的变换阵为[T7]。
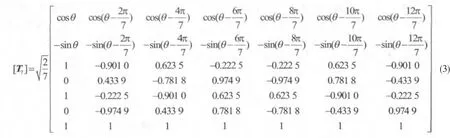
将该变换阵代入到自然坐标系下电机方程,可得旋转坐标系下基波子空间电压、磁链和转矩方程如式(4)~(6)。

基波子空间方程与三相感应电机方程很相似,式中 Ψs、Ψr分别是定、 转子磁链基波,Ls、Lr分别是定、转子自感,Lm为互感,ωs、ωsl分别为定子频率同步角速度和转差,np为极对数。
谐波子空间电压方程为:

两谐波子空间中的电流只与电机定子电阻和自漏感有关,故需要在电机控制时对其进行抑制。
1.2 七相电压型逆变器电压矢量分布
七相电压型逆变器共有128个开关状态,每个开关状态在3个子空间对应的电压矢量可由式(8)决定。

图1 为基波子空间电压矢量分布图,图中数字(即矢量号)转化成二进制数即为逆变器的开关状态。0、127 为零矢量,非零矢量中除去 35、75、70…101和69、39、23…83两组矢量外,剩余7组矢量形成同心正14边形,构成S1~S14共14个扇区,以直流母线电压 Vdc为 1, 矢量幅值 VA:VB:VC:VD:VE:VF:VG=0.127:0159:0.229:0.286:0.356:0.515:0.642。同样方法可得到其他两谐波子空间电压矢量的分布。某一个在谐波子空间中的电压矢量是基波子空间中相同矢量号电压矢量在该谐波子空间的投影。当为了合成基波子空间中参考矢量而施加电压矢量时,在谐波子空间也会由这些电压矢量的投影来产生3次和5次谐波合成矢量,根据式(7)进而形成谐波电流。

图1 七相系统空间电压矢量分布

图2 基于转子磁链定向的七相感应电机矢量控制系统框图
2 消除谐波电流的转子磁场定向七相感应电机矢量控制
2.1 七相感应电机矢量控制原理
图2 为基于转子磁链定向的七相感应电机矢量控制系统框图。
在七相电机矢量控制方面,主要考虑基波子空间的旋转磁场和电磁转矩,对ids和iqs进行解耦控制,可借鉴三相电机矢量控制方程进行转子磁场定向,有式(9)成立:

式(9)即框图中转矩、磁链、磁链角计算模块。ids和iqs为旋转坐标系下解耦后的定子电流的励磁分量和转矩分量,Tr=Lr/Rr为转子时间常数,θs为磁链角。
在消除定子谐波电流方面,采用消除谐波的七相载波型UVM调制方式,与传统的SVPWM调制方式只控制基波子空间dq分量相比,该调制方式同时对谐波子空间的4个谐波分量(忽略零序子空间分量)进行控制,追加谐波子空间电压矢量为零的约束条件并通过PI闭环控制调节至最小。
2.2 七相UVM调制算法
七相UVM算法本身不具有消除谐波功能,该算法能实现消除谐波的前提在于其输入参考电压信号本身不含谐波。如图3(a)所示,在一个开关周期Ts(半个载波周期)内,每一相开关状态从1变成0的时间被称为有效作用时间为Teff,因为只有在Teff内才会有逆变器到负载的有功输出。对于七相各相“虚拟时间”Tis,根据载波周期内平均输出电压等于参考电压的原则,有:

式(10)中 T*is是由参考电压矢量U*d、U*q经[T7]-1反变换所得各相参考电压,为了得到正弦PWM,参考电压就必须为正弦波,而要获得正弦波,在反变换之前就要求除d、q分量外的其他分量(也即谐波分量)尽可能为零,这一点需要在电机控制时闭环调节实现。
考虑到七相参考电压及 “虚拟时间”Tis可能为负值,因此令Tis中的最大值Tmax和最小值Tmin之差为Teff。为了得到实际功率器件开关信号以及开关模式的对称,利用Teff在Ts中的位置可变且不会影响有功输出这一特点,引入偏移时间Toffset。如图3(b),可得每相桥臂开通和关断时刻,有下式:


图3 七相UVM算法
选择Toffset=Ts/2-(Tmax+Tmin)/2,且零矢量平均分配作用在一个开关周期的两端和中间。在各相参考电压为不含谐波正弦电压的开环情况下,采用七相UVM算法:
(1)正常调制范围内,给定Vdc=100 V,矢量作用顶点轨迹如图6(a)。有效矢量为图1中的VD、VF、VG三组矢量,这是由于相同桥臂开关状态总是连续的,即电压矢量中的0和1是连续的,而七相逆变器有1-6、2-5、3-4三类等效电路,对应图1中非零矢量{C16}集合(即 VD组 14 个矢量)、{C25}集合(包括 VF、VA、VE三组矢量,但 VA和 VE组“1”或“0”不连续)、{C34}集合(包括 VG、VB、VC三组矢量,但 VB和VC组“1”或“0”不连续)。具体到参考矢量位于S1扇区,有效矢量作用顺序及各桥臂开关状态分别如图4(a)和4(b),每相桥臂开关只动作一次,保证了较小的开关损耗。
(2)Toffsetmax>Toffset>Toffsetmin即可保证正常调制范围,其中 Toffsetmin=-Tmin,Toffsetmax=Ts-Tmax。定义调制系数为参考电压基波与Vdc/2的比值,则临界调制系数为1/cos(π/14)=1.025 7。是否过调制也可通过图5判断,图中表示出每个开关周期内Ts/2线附近的Toffset及其上下限大小关系。当Toffset线介于上线Toffsetmax和下线Toffsetmin之间时处于调制范围内(如图5(a)),当三线相切时为临界调制(如图5(b)),若上下线倒置则为过调制(如图5(c)),此时有效电压矢量只有VF、VG两组(如图 6(b))或者只有 VG一组(如图 6(c))。
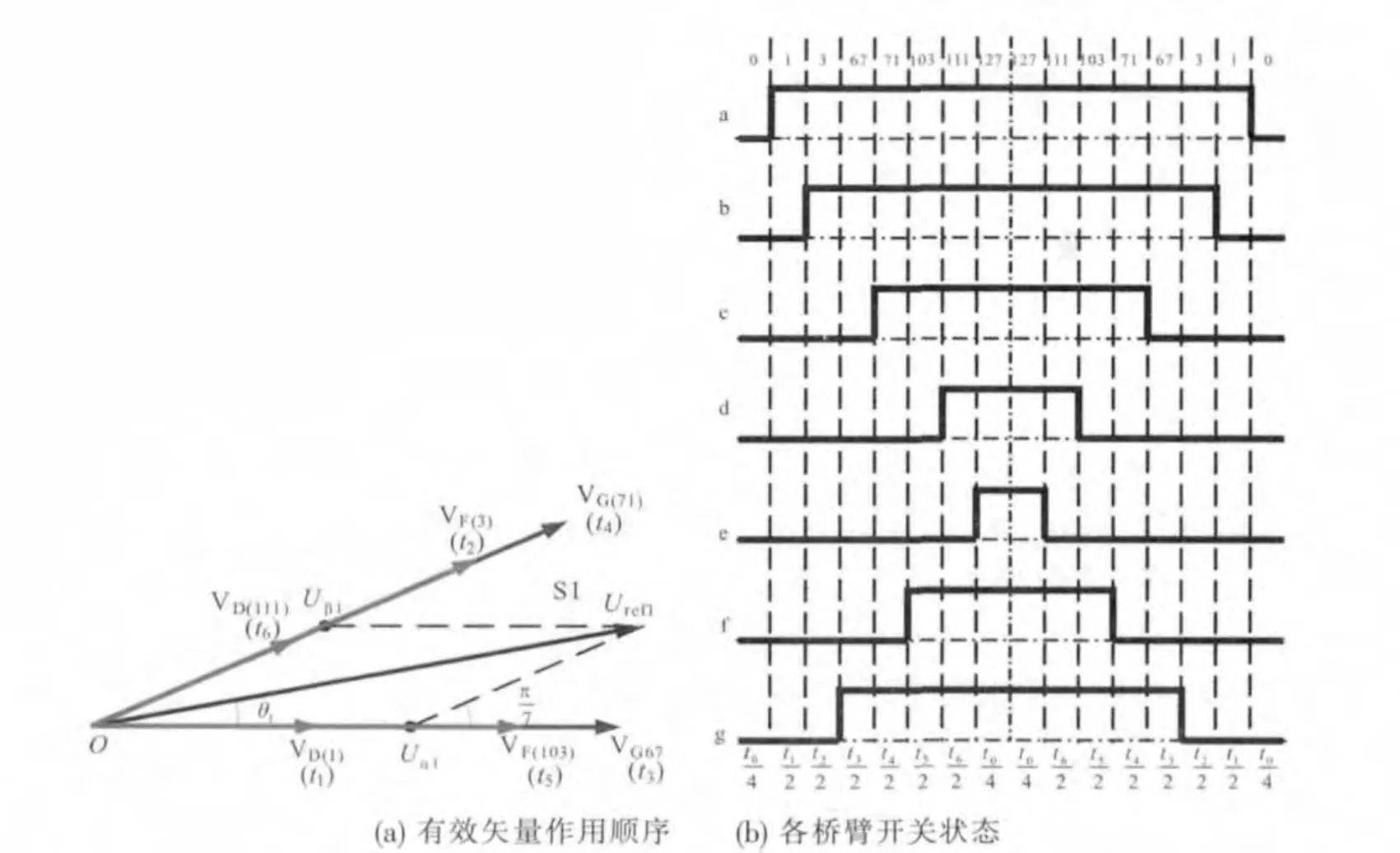
图4 S1扇区内矢量作用图

图5 Toffset及其上下限
3 基于DSP28335七相感应电机矢量控制系统平台设计
3.1 七相感应电机矢量控制系统主电路及实验平台整体设计
图7 为七相感应电机矢量控制实验平台框图,总体分为:
(1)主电路+机组
主电路为交-直-交拓扑,三相调压器经整流滤波后,7只BSM12050型IGBT构成的七相电压型逆变器,输出七相交流电接至七相感应电机,同轴直流发电机带功率电阻作负载。七相感应电机Y7160M-4为自行设计并定制,定子28槽,单层集中整距绕组,设计额定相电流20 A,额定功率7.5 kW, 参数如下:np=2,J=0.144 kg·m2,Rs=0.63 Ω,Rr=1.23 Ω,Ls=Lr=10 mH,Lm=216 mH。
(2)实验平台控制系统
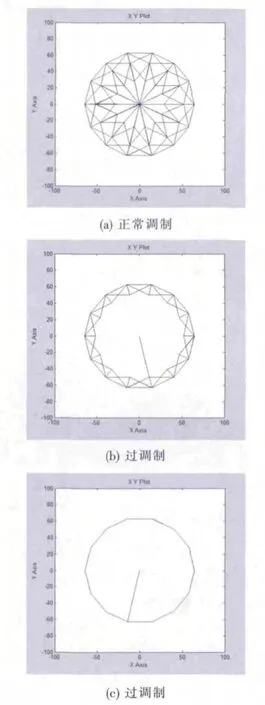
图6 不同调制系数矢量作用轨迹
控制系统包括逆变器主控板、直流发电机检测板、触摸屏人机界面,三者通过CAN总线进行通信。逆变器主控板采用TMS320F28335为主控芯片;直流发电机检测板,采用DSP2812作为控制核心,检测电阻箱上的电压和电流,同时接收电阻投切指令,并控制接触器动作,改变负载大小;触摸屏人机界面采用MCGS组态软件,作为上位机与两DSP进行通信,可实现给定转速、PI参数给定、负载电阻投切等指令输入功能,能实时显示并存储部分运行参数。
3.2 基于DSP28335逆变器主控板设计

图7 基于DSP28335七相感应电机矢量控制实验平台框图

图8 七相感应电机变频调速实验平台
考虑到DSP28335高速的浮点运算能力和丰富的硬件资源,选择其作为逆变器主控板控制芯片。逆变器主控板主要功能包括:
(1)PWM脉冲输出
DSP28335中有6个ePWM模块,可独立输出12路或者互补输出6路PWM。由于需要输出7路对称PWM波形,因此选择7路独立的PWM模式,开关频率3.3 kHz,选择连续增加模式,在EVPWM中断服务程序内,将矢量控制UVM算法得到的各相开通时刻Ta、Tb、…Tg实时更新至7个比较寄存器,输出7路对称的PWM脉冲。经Concept公司108T模块驱动板半桥模式,生成7对14路带死区的PWM。
(2) 信号检测
AD模拟量检测:1路直流母线电压+7路定子电流共8路模拟量;QEP转速检测:通过M法对欧姆龙E6B2型光电编码器A、B两路正交脉冲进行转速计算;DI数字输入检测:当检测到定子电流过流、母线电压过压、散热器过温、IGBT短路等故障信号时,采取软件封锁以及控制板硬件封锁PWM双重保护。
(3)SPI串行外围接口+DA转换
由于DSP28335没有DA模块,为了观测电机转速、转矩变化过程,采用SPI串行接口接4通道DA转换芯片TLC5620,可将所需数据转换为模拟量的形式输出。
4 仿真和实验
采用相同的电机参数,对七相感应电机进行闭环矢量控制仿真。给定转速600 r/min空载起动,0.4 s给定转速变为1 200 r/min,0.8 s时突加2 5N·m负载。如图9(a)为转矩、转速和七相定子电流波形,图9(b)为定子电流的d轴分量id和q轴分量iq波形,图9(c)为转子磁链轨迹。图9(d)~(g)分别为采用本文提出的消除谐波型UVM方法和七相SVPWM方法在空载和负载情况下的七相电流波形及其谐波分析(由于闭环调节时,频率处于不断调节变化过程之中,因此在转速进入稳态后对相电流的3个周期进行FFT分析)。

图10 实验波形
从仿真结果可以看出,电机转矩动态性能良好,转子磁链为圆形,实现了磁链和转矩的解耦控制;从两种PWM调制方式对比看,本法提出的消除谐波型UVM调制方式(空载和负载时的THD分别为3.56%和3.14%),比七相SVPWM方法(空载和负载时的THD分别为11.08%和4.72%)在空载和负载情况下消除谐波效果更好。
在搭建的七相感应电机矢量控制实验平台上进行实验验证,得到如图10(a)给定600 r/min转速起动情况下的实际转速、转矩和a相电流波形,图10(b)转速1 200 r/min时将负载由12 N·m突加至25 N·m再减载至12 N·m情况下的实验波形和图10(c)转子磁链波形。图10(d)、(e)为采用消除谐波型七相UVM调制方法在转速1 200 r/min时空载和负载 (25 N·m) 时的 ia、ib、ic和 id四个相电流波形,图10(f)、(g)为采用七相SVPWM调制方法时对应情况下的电流波形。实验结果与仿真结果很接近,电机转矩动态性能良好,转子磁链为圆形,消除谐波型UVM调制方式在空载和负载情况下谐波含量更小。
5 结论
仿真和实验结果证明采用消除谐波电流的转子磁场定向矢量控制策略,通过控制基波子空间的id和iq,能够实现磁链和转矩的解耦控制,电机的静动态性能良好;而采用追加谐波电压为零的约束条件并通过闭环控制得到的UVM调制方式,算法具有通用性,且定子电流在空载和负载时谐波消除效果均优。
[1]D Casadei,M Mengoni,G Serra,et al.Seven-phase induction motor drive based on stator flux vector control[C].International Symposium on Power Electronics Drives Automation and Motion,SPEED,AM 2008:113-119.
[2]Yifan Zhao,Thomas A Lipo.Modeling and Control of A Muti-phase Induction Machine with Structural Unbanlance:Part I.Machine Modeling and Multi Dimensional Current Regulation[J].IEEE Transactions on Energy Conversion,1996,11(3):570-577.
[3]李山.多相感应电机控制系统的研究[D].重庆:重庆大学,2009.
[4]Atif Iqbal,Sheikh Moinuddin,et al.Indirect Rotor Flux Oriented Control of A Seven-Phase Induction Motor Drive[C].IEEE International Conference on Industrial Technology,ICIT 2006:440-445.
[5]侯立军.多相感应电机变频调速系统的研究[D].西安:西安交通大学,2004.
[6]Domenico Casadei,Drazen Dujic.General modulation strategy for seven-phase inverters with independent control of multiple voltage space vectors[J].IEEE Transaction on Industry Electronics,2008,55(5):1921-1932.
[7]Dae-Woong Chungm,Joohn-Sheok Kim,etc.Unified Voltage Modulation Techinque for Real-Time Three-Phase Power Conversion[J].IEEE Transaction on Industry Applications,1998,34(2):374-380.
[8]吴伟亮,葛宝明,孙东森,毕大强.基于控制的多相交流电机变频调速系统[J].电源学报, 2011(3):38-42.
[9]杨金波,杨贵杰,李铁才.双三相永磁同步电机的建模与矢量控制[J].电机与控制学报, 2010,14(6):1-7.
猜你喜欢
防爆电机(2021年1期)2021-03-29 03:02:46
测控技术(2018年2期)2018-12-09 09:00:52
测控技术(2018年9期)2018-11-25 07:44:40
电测与仪表(2016年5期)2016-04-22 01:13:44
电测与仪表(2016年9期)2016-04-12 00:29:58
电测与仪表(2016年10期)2016-04-12 00:26:38
电测与仪表(2016年14期)2016-04-11 12:32:40
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
电机与控制应用(2015年10期)2015-03-01 03:50:16
