
舰载机着舰多模态转换技术研究
2014-12-25 09:20潘婷婷江驹王新华蔡丽青
飞行力学 2014年1期
潘婷婷,江驹,王新华,蔡丽青
(南京航空航天大学自动化学院,江苏南京210016)
0 引言
对于全天候着舰而言,采用何种工作模态引导飞机着舰对舰载机的安全至关重要。根据着舰条件选择合适的着舰引导模态,并实现多模态间的实时平滑转换,是保证着舰效率和安全性的关键。
全天候着舰引导系统包含四种工作模态[1]:模态Ⅰ(自动着舰引导系统,ACLS)、模态ⅠA、模态Ⅱ(仪表着舰引导系统,ILS)和模态Ⅲ(舰上控制进场系统,CCAS)。文献[2-5]研究了四种工作模态的工作原理、结构配置、工作条件等。文献[6]研究了飞行轨迹是否处于安全区和数据链是否出现故障情况下的模态转换逻辑,但在研究基于安全区的模态转换时,仅仅研究了模态Ⅰ和模态Ⅱ之间的模态转换逻辑,且没有设计模态转换技术。本文在已有文献的基础上,给出了四种模态的安全区,根据飞行轨迹与各模态工作安全区之间的关系,完善了四种模态间的转换逻辑,并比较分析了常见的几种模态转换技术,进而设计了着舰多模态间的实时转换技术,最后针对具有下沉率干扰的着舰情况进行了相应的仿真验证。
1 着舰安全区的建立
着舰过程中,当采取不同的着舰引导系统时,舰载机飞行的安全区不同。根据美国着舰信号官参考手册给出的模态Ⅰ和模态Ⅱ的安全区边界[7],通过曲线拟合得到模态Ⅰ和模态Ⅱ安全区的曲线方程为:

式中,x为舰载机距着舰点的距离,ft。
假设某型舰载机的着舰速度恒定,整个着舰时间为56.3 s,根据上述安全区的曲线方程,即可得到模态Ⅰ和模态Ⅱ工作下所允许的飞行高度,如图1所示。

图1 模态Ⅰ和模态Ⅱ的安全区Fig.1 Safe area of mode Ⅰand modeⅡ
舰载机着舰时,在离舰1389 m处进入菲涅耳透镜入口[1],此时飞机在理想下滑线上的高度为84.95 m(选理想下滑角为 -3.5°),而此时菲涅耳透镜的工作安全区为理想下滑线上下16.5 m[6],所以FLOLS引导着舰时,飞机的安全高度为68.45~101.45 m,即为模态Ⅲ引导着舰的安全区。
模态ⅠA工作时,是先按照模态Ⅰ将飞机引导至FLOLS入口,再采用FLOLS引导着舰,所以模态ⅠA的安全区由两部分组成,离舰前1389 m为模态Ⅰ的安全区,之后为 FLOLS着舰时飞机的安全高度。
2 着舰模态转换逻辑分析
舰载机着舰期间,舰载雷达实时检测飞机是否在规定的安全区内飞行,进而决定采取何种工作模态引导飞机着舰。安全区内的模态转换逻辑见图2所示的流程图。

图2 安全区模态转换逻辑流程图Fig.2 Logic flow of mode conversion in safe area
模态Ⅰ与模态ⅠA非常类似,它们之间的转换是飞行员根据天气情况,选择其中一种模态引导飞机着舰。一般情况下,当航母控制区云层的能见度低于9260 m,在日落后1.5 h至日出前1.5 h的情况下,采用模态Ⅰ引导飞机着舰;当航母控制区云层的能见度超过9260 m时,则采用模态ⅠA引导飞机着舰。
3 模态转换技术研究
由于模态Ⅰ和模态ⅠA是根据雷达系统给出的飞行高度与理想高度之间的高度差,通过飞行控制对飞机姿态的控制,从而消除高度差,实现安全着舰;而模态Ⅱ是通过消除仪表所显示的下滑偏差角来实现对基准下滑轨迹的跟踪;模态Ⅲ是舰上管制人员根据雷达测出飞机的位置判断飞机是否在正确的下滑道,然后通知飞行员操纵飞机着舰。因此在短暂的模态转换过程中,转换前后控制系统的控制参数不同,甚至结构也不同,这样必然会出现输出至伺服机构的控制量的突变,由此引起飞机过载突变,对飞机的安全着舰不利,并且飞行员很难在短短的几秒内用操纵动作来完成模态间的切换。所以,必须采用合适的自动切换技术来实现模态间的快速切换,并能抑制相应的瞬态响应。
3.1 模块转换技术分析
3.1.1 惯性转换
该转换技术主要利用惯性环节的存储功能,保证转换前后输出的连续性,能够有效避免舵面的跳变,从而抑制转换过程中出现的瞬态响应,其结构如图 3 所示[8]。
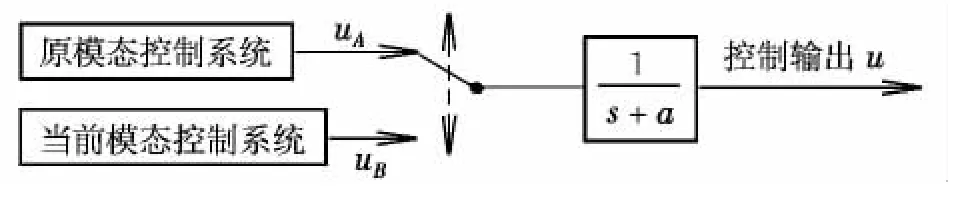
图3 惯性转换技术Fig.3 Inertia conversion technology
系统的控制输出为:

由系统的输出可以看出,转换前后系统的模型发生了改变。
3.1.2 惯性延迟式转换
惯性延迟式转换[9]和惯性转换技术一样具有惯性存储环节,可以保证转换前后的连续性,避免控制律输出的跳变。不同之处在于该技术需要同时计算转换前后两种模态的控制律输出,转换过程中,两种模态共同作用,转换前后过渡更为平滑。结构如图4所示。

图4 惯性延迟转换技术Fig.4 Inertial delay conversion technology
当控制律切换开关置于“1”时,原模态工作;当开关置于“0”时,转为当前模态。假设在t0时刻,模态发生转换,到t1时刻,模态转换结束,则系统的输出为:

可以看出,在模态转换过程中,原模态的控制律输出的加权系数在规定的时间内从1衰减到0,而当前模态的控制律输出的加权系数从0渐升到1,从而实现了模态间的平滑切换。惯性环节因子a影响模态间转换性能,其值越大,转换时间越短。通过选取合适的a值,来达到模态间的快速平滑切换,进而有效抑制切换过程中的瞬态响应。
3.1.3 积分跟踪式转换技术
该转换技术通过积分器将两模态控制输出的差值加到当前控制律计算结果中,直到差值E=0。这样可以保证控制律切换时,当前模态的控制律的初值等于原模态的控制律的终值,既保证了切换前后系统的连续性,又保证了切换过程的平滑,其结构如图 5 所示[9]。

图5 积分跟踪式转换技术Fig.5 Integral tracking conversion technology
假设在t0时刻模态发生转换,到t1时刻切换完成,则系统的输出为:

通过选取合适的K1和K2值来达到模态间的快速平滑切换,有效抑制切换过程中的瞬态响应。
3.2 模块转换技术的仿真验证
以F-4J舰载机为研究对象,将以上三种模态转换技术加入到舰载机多模态着舰引导系统中,通过观察各模态控制系统输出的俯仰角响应来观察各转换技术对抑制瞬态响应的效果。以模态Ⅰ到模态Ⅱ的转换为例,仿真模型如图6所示。

图6 模态转换仿真结构图Fig.6 Mode conversion simulation structure
图中,h0为理想下滑轨迹高度;h为实际飞行高度;Γ为下滑偏差角;θ为俯仰角。设模态在t=5 s时刻发生转换,仿真结果如图7所示。

图7 俯仰角响应曲线Fig.7 Pitching angle response curve
可以看出,若不加转换技术,直接发生转换,则在5 s时刻俯仰角发生了跳变,这必然会引起剧烈的瞬态响应,对飞机的着舰不利。而加入的三种转换技术,均没有改变俯仰角的稳态值,且变化较为平滑,在转换过程中均没有发生跳变现象。由此可见,加入转换技术能够抑制相应的瞬态响应,可以保证切换的平滑。
相比积分跟踪式转换技术,惯性转换技术与惯性延迟式转换技术能够抑制俯仰角的振荡峰值,这对飞机的着舰有利;然而惯性转换技术在转换前后,使系统发生了改变,这对系统本有的特性不利,而且抑制俯仰角振荡峰值能力也没有惯性延迟式切换技术强。因此,最终选择惯性延迟式转换技术来实现舰载机多模态间的转换。
4 模态转换仿真验证与分析
根据安全区内模态转换逻辑,运用惯性延迟式转换技术实现舰载机多模态间的转换。建立模态转换仿真结构图,如图8所示。着舰过程中,若在某一时刻(仿真时取25 s时刻)加入下沉速率的干扰,飞机将进入不同的模态安全区,相应的仿真曲线如图9所示。
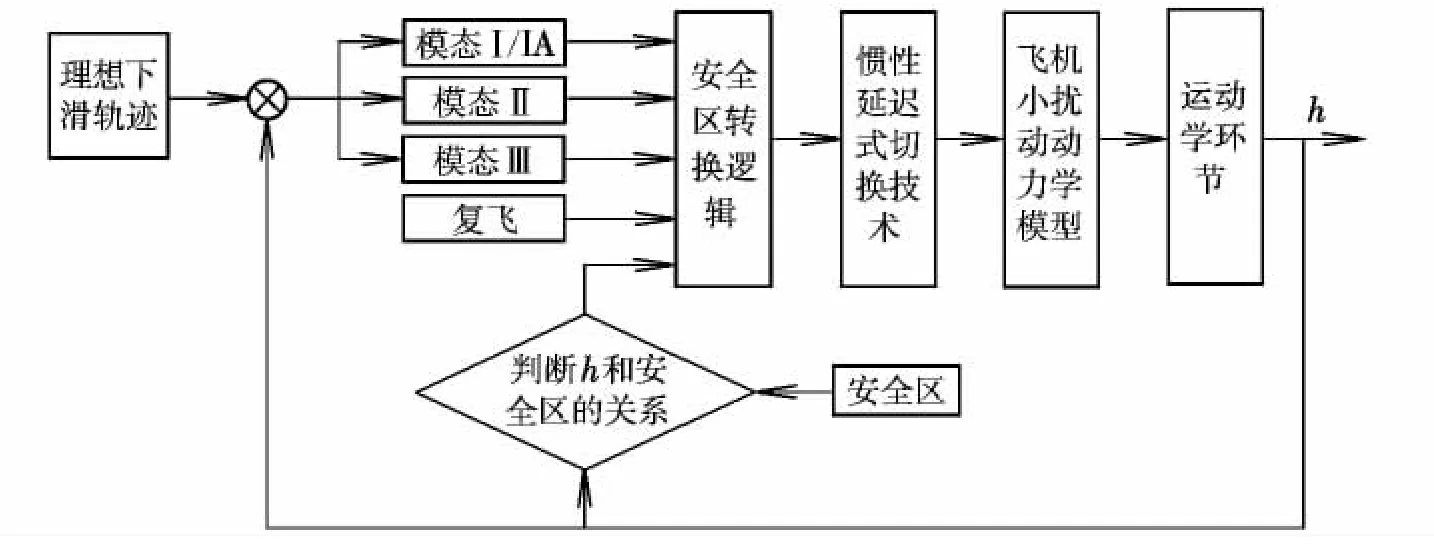
图8 模态转换仿真结构图Fig.8 Mode conversion simulation structure

图9 模态转换仿真曲线Fig.9 Mode conversion simulation curve
图中,曲线0表示模态Ⅱ下边界;曲线1表示模态Ⅰ下边界;曲线2表示模态Ⅰ上边界;曲线3表示模态Ⅱ上边界;曲线4为飞行轨迹曲线。右上角的小图为模态转换数值表示,0表示复飞,1表示模态Ⅰ,2表示模态Ⅱ,3表示模态Ⅲ。
从图9(a)可以看出,25 s时加入-4.5 m/s的下沉速率干扰时,整个着舰过程中飞机均在模态Ⅰ的安全区内由模态Ⅰ引导飞机着舰,56 s(着舰前0.3 s)时转为复飞,出现这种情况是因为文献[7]中的安全区在离着舰点305 m以下没有定义,所以图1所建立的着舰过程中的安全区存在一定的误差。实际上在56 s时,飞机已保持着舰的姿态不变,可以保证最终安全着舰。
由图9(b)可以看出,25 s时加入-7.5 m/s的下沉速率干扰时,整个着舰过程中的模态转换顺序为:模态Ⅰ→模态Ⅱ→模态Ⅲ→复飞。由飞行轨迹可以看出,27 s时飞机超出模态Ⅰ的安全区,转为模态Ⅱ引导着舰;29 s时飞机超出模态Ⅱ的安全区,由模态Ⅲ引导着舰;但是在35 s时模态Ⅲ并没有将飞机引入到FLOLS的安全区内,所以飞机复飞。整个过程转换平滑快速。
综上所述,采用惯性延迟式切换技术不但可以保证飞机实现不同模态间的自动切换,而且由于抑制了相应的瞬态响应,保证了飞机着舰的安全性。
5 结束语
根据全天候着舰模态的安全区,研究了舰载机着舰多模态转换逻辑,并设计了模态间的转换技术。该转换技术能够有效抑制模态转换过程中飞机出现的瞬态响应,保证多模态间的实时平滑转换,对研究舰载机安全着舰有一定的意义。
[1] 杨一栋.舰载飞机着舰引导与控制[M].北京:国防工业出版社,2007.
[2] Fitzgerald P.Flight control system design for autonomous UAV carrier landing[D].Cranfield:Cranfield University,2004.
[3] Prickett A L.Analysis of the instrument carrier landing system certification process for amphibious assault ships[D].Knoxiville:The University of Tennessee,2003.
[4] 方芬.舰载机光学助降关键技术研究[D].南京:南京航空航天大学,2009.
[5] Prickett A L,Parkes CJ.Flight testing of the F/A-18E/F automatic carrier landing system[C]//IEEE Proceedings of Aerospace Conference.Big Sky,MT.USA:IEEE,2001:2593-2612.
[6] 王宝宝.舰载机着舰安全技术研究[D].南京:南京航空航天大学,2010.
[7] McCabe M J.Landing signal officer reference manual[Z].Washington D C,U.S.Naval Landing Signal Officers School,1999:28-52.
[8] 豆国辉,高正红.淡化器仿真与设计[J].科学技术与工程,2012,12(11):2621-2625.
[9] 姬猛.推力不对称时民机飞行控制律重构技术研究[D].南京:南京航空航天大学,2011.
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
防爆电机(2020年3期)2020-11-06
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
小学科学(学生版)(2016年1期)2016-10-09
湖北经济学院学报·人文社科版(2015年8期)2015-12-29
中国光学(2015年5期)2015-12-09
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
空间控制技术与应用(2015年1期)2015-06-05
上海电机学院学报(2015年4期)2015-02-28
