
基于IR2110 的三相逆变器控制策略与驱动电路设计
2014-12-24 08:53朱俊臻康少华王爱荣周华锋
军事交通学院学报 2014年6期
朱俊臻,康少华,王爱荣,周华锋
(1.军事交通学院 研究生管理大队,天津300161;2.军事交通学院 军事物流系,天津300161)
三相逆变器用于交流异步电动机调速控制。根据调速的静、动态性能,逆变器的控制策略可简单分为转差频率控制、矢量控制和直接转矩控制[1]。其中,当对调速系统的静、动态性能要求较高时,转差频率控制不能满足要求,而矢量控制和直接转矩控制使得异步电动机机械特性以及动态性能达到足以和他励直流电动机特性相媲美的程度[2]。由于异步电动机是一个多变量、强耦合、非线性系统,直接转矩控制存在转矩脉动较大的缺点[1-2],所以本文运用异步电动机按转子磁场定向的矢量控制策略,实现交流电动机磁通和转矩的独立控制[1],并对逆变器驱动电路进行设计和实验,以实现三相逆变器的矢量变频控制。
1 控制系统概述
异步电动机矢量控制的基本思路,是将定子电流瞬时值分解为互不耦合的励磁分量和转矩分量,并建立起电动机动态电磁转矩与这2 个分量的直接联系,通过一系列坐标变化,转化成为逆变器加载到交流电动机的三相电流分量,从本质上实现三相电流的解耦控制,使异步电动机能像他励直流电动机一样控制。矢量控制系统原理结构如图1[3]所示。

图1 转差型矢量控制系统框图
图中,ASR 为速度调节器,ACRA—ACRC 为相电流调节器,BRT 为测速传感器为给定的定子二相同步旋转电流,为 给 定 的 定 子 二 相静止电流,为给定的定子三相静止电流,ω*为给定转速,ω 为实际转速,φs为磁场定向角。具体变换矩阵如下。
(1)定子轴系的二相静止到二相同步旋转(2S/2R)的电流变换矩阵方程为[3]
其中,φs的计算公式为[3]
(2)定子轴系的三相静止到二相静止(3S/2S)的电流变换矩阵方程为[3]

2 控制程序设计
结合对控制系统原理结构的理解,在设计控制程序时,主要考虑数据采集与处理、坐标变换、控制算法3 个模块,控制程序流程如图2 所示。
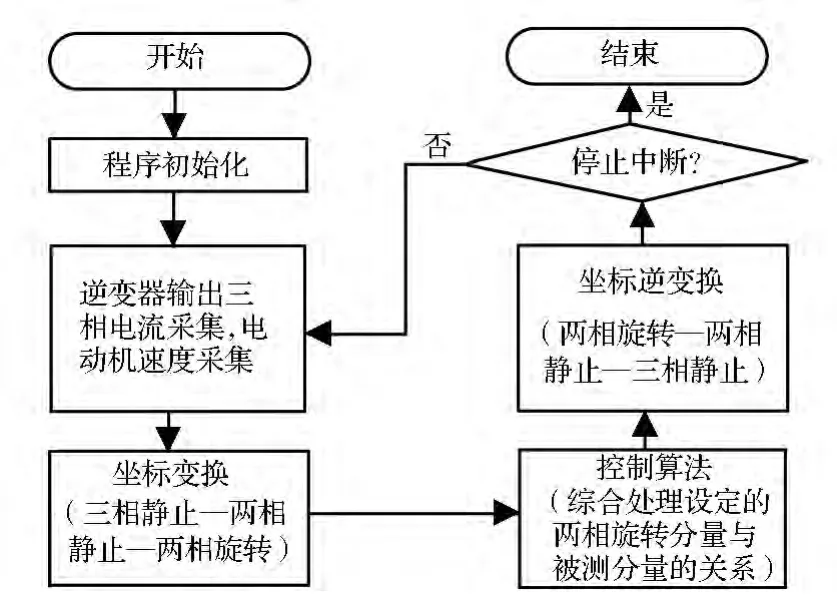
图2 控制程序流程
3 逆变器驱动电路设计
逆变器驱动电路由逻辑信号处理电路和MOSFET 驱动电路2 部分组成。逻辑信号处理电路输入、输出分别是单片机PWM 信号和IR2110 控制信号;MOSFET 驱动电路实现弱电对强电的控制,驱动电路分通道设计,能有效避免强电对弱电产生干扰。逆变驱动电路框图如图3 所示。
3.1 逻辑信号处理电路
逻辑信号处理电路如图4 所示。其功能是产生满足MOSFET 驱动电路要求的时序信号,且对输出信号进行互锁保护。

图3 逆变器驱动电路框图

图4 逻辑信号处理电路
单片机输出的6 路信号PWM1—PWM6 经过逻辑电路后产生各组IR2110 高低输入端所需的控制信号INH 与INL。通过或非门74JC02 和或门74ALS32 进行逻辑运算,实现各组高低输出信号之间的互锁保护,使INH1 和INL1、INH2 和INL2、INH3 和INL3 不能同时为高电平。其中,IN1 路逻辑运算真值见表1。IN1 逻辑电路的输入、输出时序如图5 所示。

表1 IN1 路逻辑运算真值
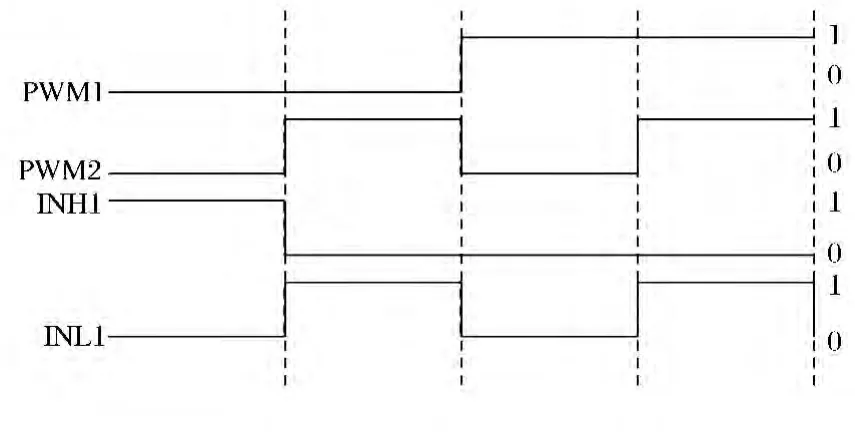
图5 IN1 逻辑电路时序
3.2 MOSFET 驱动电路
MOSFET 驱动部分采用3 片IR2110 芯片,分别驱动上下桥2 对、共6 组MOSFET,构成对逆变器的直接控制电路(如图6 所示)。

图6 MOSFET 驱动电路
IR2110 是IR 公司推出的一种双通道高压、高速电压型功率开关器件,具有独立的高低端输出驱动通道。栅极驱动电压为10 ~20 V,逻辑电源电压为5 ~20 V,悬浮通道用于驱动MOSFET 的高压端电压可以达到500 V[4]。本逆变电路的MOSFET 选用英飞凌的IPB025N10N,其漏源最大电压为100 V,最大电流为180 A,导通电阻为2.5 mΩ,响应时间为34 ns[5]。
图中,IR2110 供电电源VDD 为5 V,自举电路电源VCC 为l5 V,数字地与模拟地串0 Ω 电阻共地,C2、C5、C8 为自举电容,D1、D2、D3 为续流二极管,C1、C3、C4、C6、C7、C9 为滤波电容,D4、D5、D7、D8、D10、D11、D13、D14、D16、D17、D19、D20为钳位保护二极管,防止加在MOSFET 栅极电压超过允许范围0 ~15 V。
就U1 所对应的电路而言,逻辑信号处理电路输出的INL1、INH1 使U1 对应的高低端口(HO、LO)按照规则输出高低电平,实现上下桥MOSFET交替导通。当INH1 =0、INL1 =1 时,U1 的LO 端产生高电平,使下桥臂组MOSFET 导通,此时VS接地,+15 V 经过D1、C2、下桥臂组,接地给C2 充电;当INH1 =1、INL1 =0 时,上桥臂组MOSFET 导通瞬间,VS 端为高电压,为了使MOSFET 饱和导通,C2 必须放电,此时C2 相当于电压源,U1 的VB端是正极,VS 端是负极,为MOSFET 栅源间提供15 V 的开启电压。由此可见,上桥臂组的导通必须要以下桥臂组的导通为前提,给自举电容充电。
4 实验分析
根据上述电路分析,实验重点对逻辑处理电路输出INH1、INL1 和IR2110 的高低输出端GH1、GL1 随PWM1、PWM2 变化波形进行验证,通过波形记录仪测量得到波形如图7、8 所示。

图7 INH1、INL1 随PWM1、PWM2 变化波形
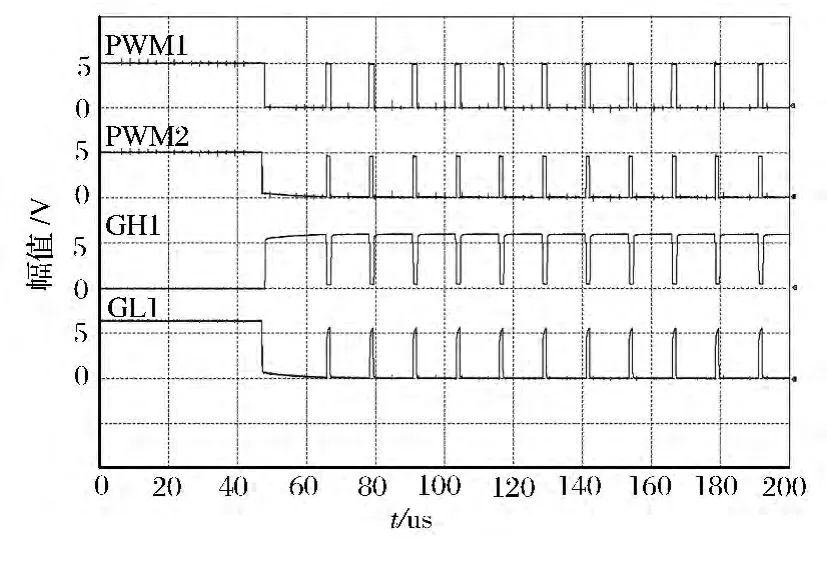
图8 GH1、GL1 随PWM1、PWM2 变化波形
可以看出,逻辑处理电路输出波形与本文设计时序图对应关系一致,且动态响应迅速;同时IR2110 的高低输出端波形也随逻辑信号处理电路输出波形同态变化。实验证明,本控制策略可行,逆变器驱动电路运行稳定,能够达到设计要求。
[1] 王仁峰.基于XC164 的异步电机矢量控制系统的研究与实现[D].上海:上海大学,2007.
[2] 陈伯时,陈敏逊. 交流调速系统[M]. 北京:机械工业出版社,2009.
[3] 李华德,白晶.交流调速控制系统[M].北京:电子工业出版社,2003:99-119.
[4] International Rectifier Inc Products. IR2110/IR2113 data sheet[EB/OL]. [2013-05-12]www.a//data.sheet.com.
[5] Infineon Technologies AG. IPB025N10N data sheet[EB/OL].[2013-06-12]]www.a//data.sheet.com.
猜你喜欢
——信号处理
无线电工程(2022年10期)2022-10-24
中国特种设备安全(2022年1期)2022-04-26
内蒙古电力技术(2021年5期)2021-11-21
莆田学院学报(2021年5期)2021-11-13
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
电子制作(2019年14期)2019-08-20
速读·下旬(2019年3期)2019-04-11
电子制作(2018年17期)2018-09-28
