
6 ×6 无人驾驶车辆悬架系统技术方案
2014-12-24 08:53李栓成孔瑞祥秦万军王一超
军事交通学院学报 2014年6期
李栓成,孔瑞祥,陈 欣,秦万军,王一超
(1.军事交通学院 军用车辆系,天津300161;2.军事交通学院 研究生管理大队,天津300161;3.71357 部队,山东 莱阳265206)
美国陆军研制的未来战斗系统(future combat system,FCS)是由多种系统集成的多功能、网络化、轻型化、智能化武器系统,随着技术的不断成熟,该系统已经逐步装备美陆军部队。后勤机器人车辆MULE,亦称为运输型“骡子”(图1 所示),作为FCS 中的主要运输装备,主要用于部队士兵运送武器、弹药和给养。1 台MULE 能够支援2 个徒步步兵班,并具备在复杂地形上伴随步兵班的机动能力。其主要任务是为徒步步兵班运输1 900 ~2 400 lb(1lb =0. 454 kg)的装备和帆布背包,也能够执行伤员后送任务。

图1 后勤机器人车辆MULE
“骡子”的6 ×6 底盘配有独立铰接式悬架装置,使其在崎岖的地形上具备高度的机动性,越障高度达到1.5 m,大大超过了美国陆军现役其他任何轮式或履带式车辆的越障高度。其越壕宽也达到1.5 m,车辆行驶侧坡角度大于40°,涉水深至少为1.25 m。“骡子”采用制动式转向装置,并采用混合电力驱动系统,每一个轮胎的轮毂内都装有电动机。“骡子”具有很高的抗毁性,如1 个轮胎受损或被打掉,剩余的其他5 个轮胎仍能保持足够的机动能力。
为满足未来战争物资运输要求,本文以后勤机器人车辆MULE 为参考,对6 ×6 无人驾驶车辆悬架系统进行了研究,提出了独立铰接悬架系统技术方案,并对其进行了分析计算。该项研究将对我军未来无人驾驶车辆的研制提供参考。
1 基本要求
基于无人驾驶车辆各种越障及隐身功能,对悬架系统提出以下要求。
(1)各驱动车轮采用各自独立的悬架系统,以保证某一车轮悬架系统损坏,其他车轮悬架系统正常工作。
(2)各车轮的独立悬架摆臂可前后大角度摆动,单边摆动角度大于90°,并在各摆动位置能够实现悬架的缓冲减振功能。
2 布置方案及结构
针对无人驾驶车辆对悬架系统的要求,其悬架系统已经脱离传统的轮式车辆悬架的概念。因此,本文提出了采用旋转油缸驱动悬架摆臂的摆动、以橡胶弹簧作为减振和缓冲元件的独立铰接悬架结构(如图2 所示)。该结构可实现悬架摆臂的前后大角度摆动,同时在任何摆角可实现悬架功能。该悬架系统主要由悬架摆臂驱动机构、悬架机构2 个部分组成。
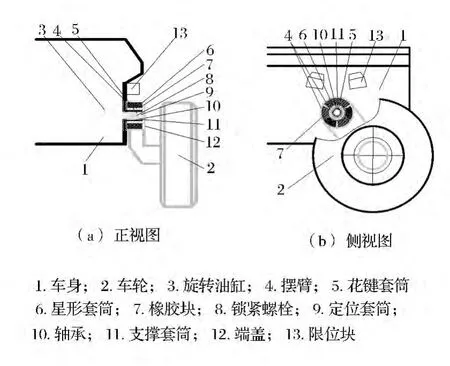
图2 独立铰接悬架系统示意
(1)悬架摆臂驱动机构。该机构由旋转油缸组成,其工作原理如图3 所示。旋转油缸将液压能转换成旋转动能,并在2 个方向产生恒定的转矩。结构上主要由封闭的圆柱形液压缸、限位块和带叶片的旋转轴组成。当液压作用在叶片的任何一边时,都将使旋转轴旋转。旋转油缸输出转矩决定于叶片的承压面积、叶片的数量及液体的压力,旋转的速度取决于液体的流量和液压系统的压力容积。旋转油缸有单叶片和双叶片2 种,对于特殊用途可以采用3 个或更多的叶片,在液体压力相同的情况下,随着叶片数量的增加,输出转矩也会相应增大。单叶片旋转角度大(最大280°),输出转矩低;双叶片旋转角度小(最大100°),输出转矩大。考虑到无人驾驶车辆单个车轮摆动的驱动转矩并不大,而摆臂要求的摆动角度(从一端极限位置转到另一端极限位置)超过180°,因此,本方案选用单叶片式旋转油缸。

图3 旋转油缸工作原理示意
(2)悬架机构。采用橡胶弹簧作为减振和缓冲元件。橡胶弹簧本身具有一定弹性,可作为悬架系统的弹性元件;同时,橡胶弹簧在变形过程中,依靠橡胶分子之间的摩擦,具有一定的阻尼作用,可作为悬架系统的阻尼元件。本方案中采用橡胶弹簧结构,使悬架系统结构简单、尺寸减小、成本降低,且橡胶弹簧免于维护。
通过采用本方案悬架系统,无人驾驶车辆可实现正常行驶状态、趴下状态、最高状态、越台阶状态和侧坡行驶状态(如图4 所示)。
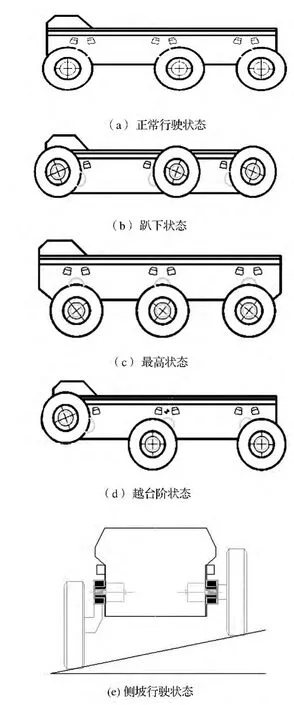
图4 无人驾驶车辆各种姿态示意
3 单个车轮悬架刚度计算
3.1 橡胶弹簧扭转刚度计算
从图2 可以看出,悬架压缩时有相间60°的3块扇形橡胶弹簧工作。现将其中一块橡胶弹簧作为研究对象,计算其扭转刚度,然后计算3 块橡胶弹簧并联工作的扭转刚度。
单块扇形橡胶弹簧计算示意如图5 所示。图中,R为橡胶弹簧的平均工作半径,θ 为弹簧的扇形角度,当弹簧受力增加ΔF时,橡胶弹簧的变形为Δθ。设橡胶弹簧的扭转刚度为K'
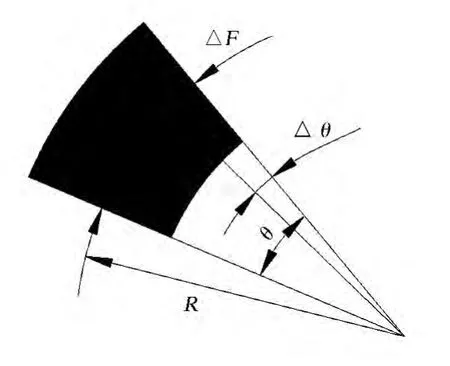
图5 扇形橡胶弹簧计算示意
θ,则

式中:ΔM为橡胶弹簧的转矩变化量,N·mm;Δθ为橡胶弹簧的转角变化量,(°)。
对于橡胶弹簧的压缩变形,在主要应用范围内,应力与应变之间的关系可表示为

式中:σ 为应力,MPa;ε 为应变,%;Eα为表观弹性模量,MPa。
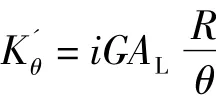
根据式(2)得

式中:AL为橡胶弹簧承载面积,mm2;θ 为弹簧的扇形角度,(°)。
将式(3)代入式(1)得

橡胶弹簧在压缩时,其表观弹性模量Eα与橡胶元件的几何形状有关,可表示为

式中:i为几何形状影响系数;G为橡胶的切变模量,MPa。
对于图5 中的扇形橡胶弹簧,在平均工作半径R较大时,可以近似视为矩形弹簧,而对于矩形弹簧,几何形状影响系数i=3.6(1 +2.22S2),其中,S为橡胶弹簧承载面积AL与自由面积AF之比,对于矩形弹簧为

式中:a为橡胶弹簧长度,mm;b为橡胶弹簧宽度,mm;h为橡胶弹簧高度,mm。
对于式(5)中的切变模量G,在技术条件中一般不规定,而是规定橡胶的硬度。切变模量G和肖氏硬度HS 的关系在实用范围内可近似表示为

将式(5)代入式(4)得
悬架工作时有3 块扇形橡胶并联工作,因此,橡胶弹簧的的扭转刚度Kθ为

3.2 单个车轮悬架刚度计算
设悬架摆臂的长度为L,摆臂的初始摆角为φ0,悬架在地面向上的作用力P的作用下,摆动角度变为φ,悬架垂直方向变形量为f。单个车轮悬架刚度计算示意如图6 所示。
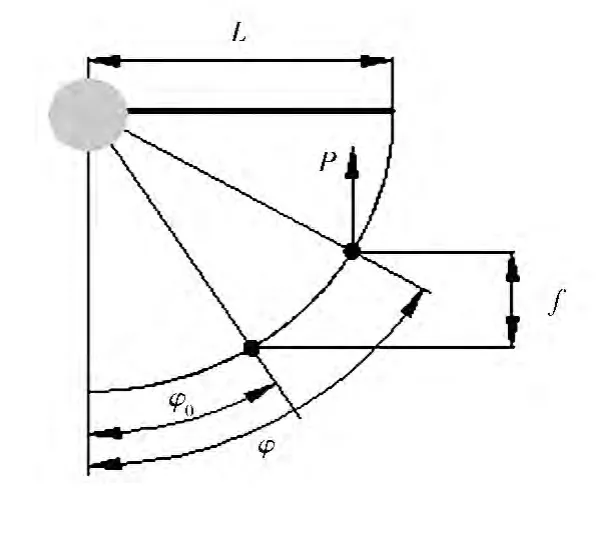
图6 单个车轮悬架线刚度计算示意
由图6 的几何关系可得

位移对转角的微分为

又,橡胶弹簧的角位移为

则

力P对转角φ 微分为


4 实例计算
(1)悬架刚度的计算。依据无人驾驶车辆初步战术技术指标,无人驾驶车辆为6 ×6 驱动,满载质量2.5 t,每个车轮采用摆臂式独立铰接悬架支承,要求在战场条件下,当某2 个车轮被炸毁时,车辆能够依靠其他4 个车轮正常行驶。因此,每个车轮的承载质量为2.5/4 =0.625 t。无人驾驶车辆的悬架初始计算参数见表1[4]。
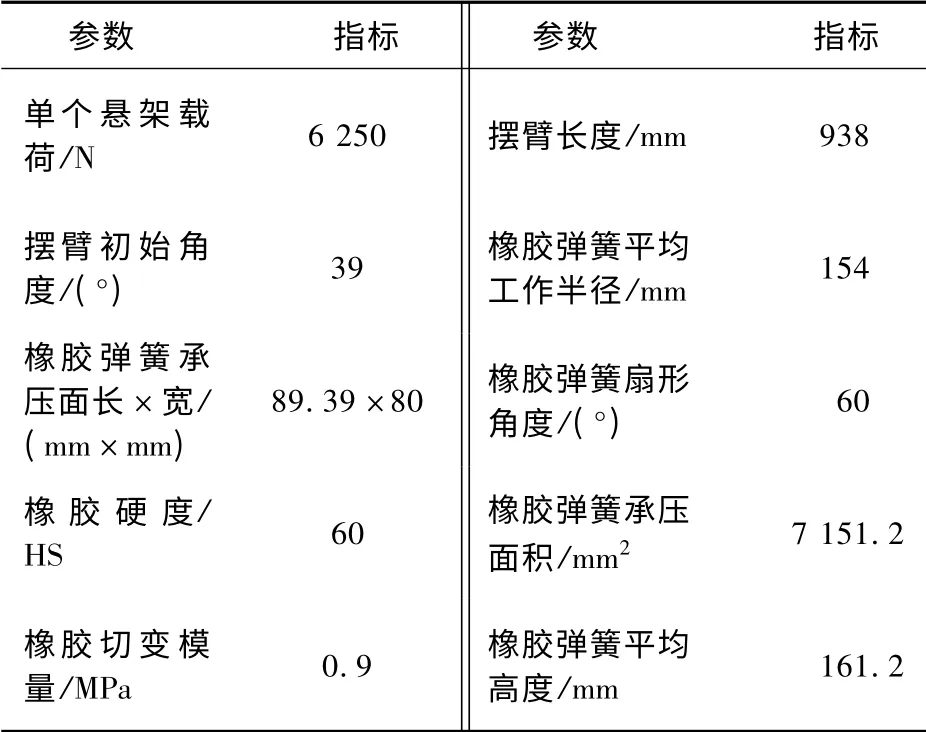
表1 无人驾驶车辆悬架初始计算参数
根据表1 初始参数及C与转角φ 的关系,利用Matlab 可以得到C-φ 的关系曲线(如图7 所示)。由图7 可知,悬架是变刚度的,伴随摆臂转角的增加刚度降低。该变化曲线是此结构形式悬架所特有的。
(2)悬架偏频计算。悬架的偏频是影响车辆平顺性的重要参数,偏频(n)可按式(13)计算:

因为无人驾驶车辆的满载质量为2.5 t,假设此时车辆6 个轮平均受力,则车辆行驶时单个悬架的承载质量为M=2 500/6 =416.67 kg。
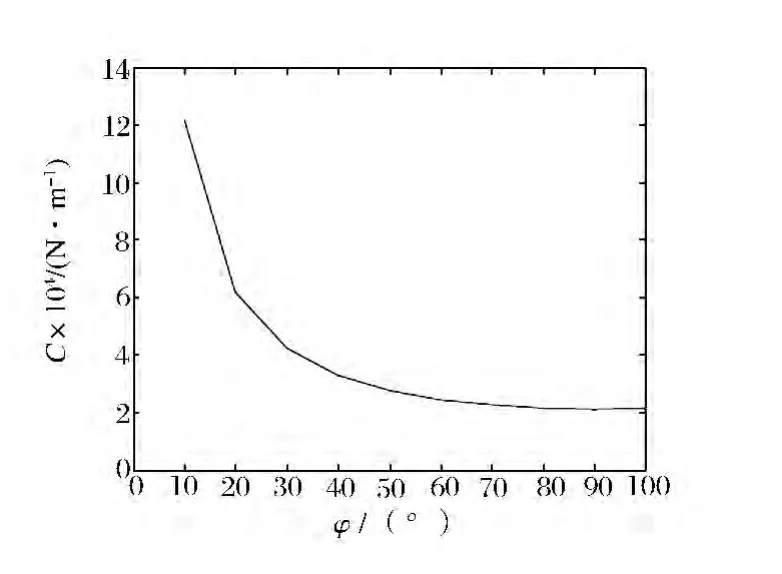
图7 C-φ 关系曲线
联立式(12)、(13),利用Matlab 可以得到n-φ 关系曲线(如图8 所示)。

图8 悬架偏频变化曲线
由图8 可知,车辆悬架的摆臂角度φ 大于30°时,悬架偏频n为1 ~1.6。该悬架符合平顺性的基本要求。
5 结 论
(1)根据无人驾驶车辆的悬架要求,提出了铰接式悬架结构方案。该方案采用橡胶弹簧作为悬架的缓冲减振元件,在前后2 个方向可以大角度摆动,使车辆的轴距随摆臂的摆角而变化,明显提高了车辆的越野行驶性能。
(2)以初步研究确定的无人驾驶车辆及悬架相关初始参数,计算了橡胶弹簧扭转刚度,得出铰接悬架刚度曲线。结果表明,随着摆臂角度的增大,悬架刚度逐渐减小。
(3)对悬架偏频进行分析计算得出,车辆悬架的摆臂角度大于30°时,悬架偏频n为1 ~1.6,符合平顺性的基本要求。
[1] 高树新,蒋永林,汪立民. 陆军战略转型中轮式车辆建设研究[J].兵工学报,2007,28(9):1092-1095.
[2] 张英会,刘辉航,王德成.弹簧手册[M]. 北京:机械工业出版社,2002.
[3] 余志生.汽车理论[M]. 北京:机械工业出版社,2009.
[4] 李联邦.纵向摆臂式悬架无人地面车辆越障性能研究[D].天津:军事交通学院,2012:18-20.
[5] 刘惟信.汽车设计[M].北京:清华大学出版社,2006.
[6] 李新耀,张印,周良生,等.双横臂扭杆悬架的特性分析及设计计算[J].汽车工程,2003,25(1):15-19.
[7] Kyeong Bin Lim,Jeong-hoon Kang,Yong-San Yoon. Obstacle-overcoming algorithm for unmanned ground vehicle with actively articulated suspensions on unstructured terrain[J]. International Conference on Control,Automation and Systems,2008(3):16.
猜你喜欢
作文小学中年级(2022年9期)2022-09-08
防爆电机(2022年2期)2022-04-26
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
科学(2020年3期)2020-11-26
小哥白尼(军事科学)(2020年8期)2020-05-22
电机与控制学报(2018年9期)2018-05-14
北京汽车(2016年6期)2016-10-13
汽车实用技术(2015年8期)2015-12-26
汽车实用技术(2015年8期)2015-12-26
