德龙烟黄河特大桥上拱弦检查车电气控制技术
2014-12-23 12:17高宜刚
科技视界 2014年7期
高宜刚
(武桥重工集团股份有限公司,湖北 武汉 430000)
0 引言
德龙烟黄河特大桥位于德大线电气化铁路上,是目前国内设计比较新颖的大桥之一,全长约8.1 千米,全桥214 个墩台,主桥结构为下承式“N”形连续钢桁梁,最大跨度180 米,是黄河流域跨度最大、长度最长的铁路钢结构桥梁。由于该桥在设计上结构新颖,工法比较特殊,复杂,桥面坡度大,检修施工十分困难,我们针对上拱弦,设计了爬坡式检查车,该机电气系统较以往同类产品,有较大改进。
1 检查车概况
德龙烟黄河特大桥上拱弦检查车(下文简称检查车)由上、下车体和吊篮组成。上车体由钢架组成,全长约20 米,下车体左右两侧各有8 个走行轮,吊篮位于上车体的车架上。检查车的额定走行速度为3米/分钟,吊篮的额定起升速度为8 米/分钟,额定载重量为250kg。
2 检查车电气系统
本车由大车走行机构、主吊篮起升机构、主吊篮走行机构和调平机构组成。其中,大车走行机构由4 台5.5kW 走行电机组成,呈矩形分布在下车体左右两侧,主要用于检查车的前进和后退动作,吊篮起升机构由4 台0.75kW 的电机组成,位于吊篮处,控制吊篮的升降功能,吊篮走行机构由4 台0.1kW 的电机组成,也位于吊篮处,主要控制吊篮的左右走行功能,调平机构包括由2 台0.75kW 的调平电机和分别驱动的两组伸缩式驱动杆,对称安装于左、右、上、下车体连接处。
由于吊篮下部是27.5kV 的高压接触网,本机在吊篮底部还安装有高压防电板和高压电报警器。此外,本车各走行轮夹紧机构的弹簧轴上还装有轮辐式拉压力传感器,用于大车走行轮附着力的检测。
本检查车的走行机构和起升机构电机均采用变频驱动技术,整机采用PLC 控制。电气系统框图如图1 所示。
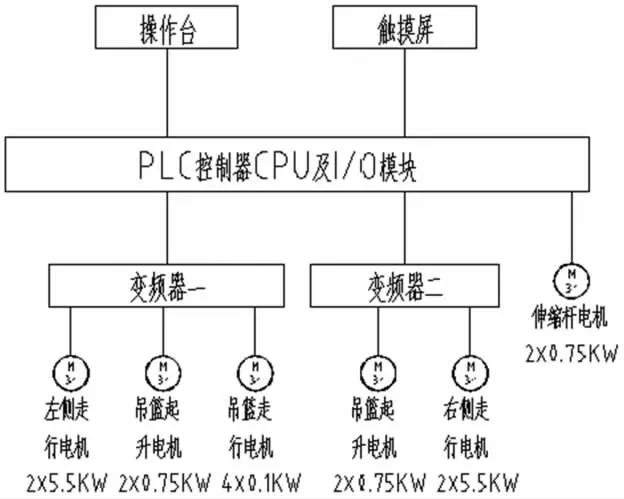
图1 电气系统框图
2.1 供电系统
由于检查车用于桥梁检查维修作业,整机供电不能采用有线电缆的方式,我们采用了柴油发电机对整个系统进行供电。该发电机位于上车体钢架旁搭起的平台上,为整车提供AC380V、频率50Hz 的动力电源,并且配有220V 电瓶给整车照明系统供电。整个发电机为框架式,防护等级达到IP65,为在阴雨天和酸碱环境中工作提供了有力保障。
2.2 电气驱动系统
检查车的各走行电机和吊篮起升电机均使用变频器驱动。考虑到平移和起升工况,选用了安川H1000 系列高性能变频器,该变频器具有针对起重设备特殊的应用功能。
(1)能设置起重机功能模式,通过设置变频器频率输出参数,将输出频率设置为不同的几段频率,可以实现走行机构和吊篮起升机构的调速功能。以前在不使用变频器的时候,速度难以控制,工作效率很低,危险性很大。
(2)变频器内置了机械抱闸逻辑顺序控制功能,启动电流平稳,系统冲击性较小。在以前没有使用变频驱动的情况下,启动电流和冲击较大,在时序配合不好的情况下容易产生溜钩现象。
(3)使用高性能矢量控制,具备高力矩启动和快速响应功能。
(4)更快速的电气制动。本机带有制动电阻,在制动的时候可以获得更大的制动力。
2.2.1 大车走行机构驱动
左右两侧大车走行机构共采用了4 台5.5kW 变频电机,左右各2台,分别由两台变频器来驱动一侧的走行电机,变频器采用V/F 控制模式。变频器的输出速度初步设为额定值的20%、50%、100%(可以根据现场实际情况来调整设置)。当大车走行速度由高速转向低速时,电动机将处于发电制动状态,这部分能量将通过变频器制动单元经制动电阻发热消散掉,大车运行机构制动减速。大车电气制动后再机械制动,以保证大车的平稳性和低冲击性。
2.2.2 吊篮起升和走行机构驱动
吊篮走行机构由4 台功率0.1kW 的电机组成,由同一变频器驱动,对称安装于上车体吊篮上方。吊篮起升机构由4 台功率0.75kW 的电机组成,分别由两台变频器进行驱动,起升电机安装在吊篮上方,通过4 根钢丝绳卷筒和吊篮连接。变频器的输出速度初步设为额定值的20%、50%、100%(可以根据现场实际情况来调整设置),可以通过操作台来进行起升速度和走行速度调整。由于吊篮起升电机和走行电机功率较小,直接采用电磁制动和机械制动。
2.2.3 调平机构驱动
本检查车具有“爬坡”的工况,在爬坡的时候可以通过调平机构来调整主桁架的水平度。调平机构由两台0.75kW 的电机组成,对称安装于左右两侧,通过电机来调节连接主桁架的蜗杆的收放,两台电机采用直接启动方式启动。
2.3 电气控制系统
本机的控制系统采用西门子S7-200 系列可编程控制器PLC 为控制核心,PLC 安装在控制柜内。较以往继电器控制,PLC 控制具有更高的可靠性、编程和修改方便等特点,并且大大节省了空间,操作也得到了简化。控制柜和操作面板设置为一体式,控制面板安装在控制柜上方,呈倾斜式,防护等级达到IP65。PLC 负责对系统所有的输入点、输出点的运算控制,同时还具备强大的故障诊断和判断功能,能够准确可靠的对整个系统运行进行监控,并负责与触摸屏之间进行通讯。
2.3.1 PLC 组成
本机PLC 的中央处理单元型号为CPU224,电源模块采用明纬NES-100-24,并配有2 个EM223 数字量输入输出单元和1 个EM231模拟量输入单元及其他相关附件。
PLC 输入点的电压为DC24V,输入信号包括:操作台各旋钮开关信号、变频器故障及制动信号、各限位开关信号、大风报警信号以及高压报警器信号等。PLC 的输出控制点的电压为DC24V,输出信号包括变频器控制端子信号、制动信号、指示灯信号以及各种报警信号等。
2.3.2 大车调平控制系统
当大车走行爬坡时,调平机构需对大车车架进行调平。调平模式分为自动调平和手动调平模式两种,可以通过“调平模式”选择开关进行选择。当“调平模式”处于“手动调平”时,操作人员可以对大车车架进行手动调平。当调平机构的左右调平速度一致时可将“调平选择”旋转开关旋转到联动档,再根据需要选择“调平”旋转开关的伸/缩以及静止等操作。当调平机构的左右调平不一致时可将“调平选择”旋转开关旋转到左/右单动档,再根据需要选择“调平”旋转开关的伸/缩以及静止等操作直到调平机构的左右调平一致时为止。当“调平模式”处于“自动调平”模式时,应先在大车车架位于水平位置时,按下“零位校正”按钮,使系统对大车的水平位置进行保存。当大车开始走行时,角度传感器会根据“零位校正”按钮所保存的初始位置进行自动调平。
2.3.3 大车走行机构控制
先将“机构选择”选择开关调至“大车走行”档,再根据实际情况将“大车走行”选择开关调至“联动/左单动/右单动”,然后旋转“速度给定”开关给定走行速度。前进和后退走行速度各有两档速度:慢速、额定速度。若想停止运行则将“速度给定”开关调至零位。
在两侧大车走行轮处安装有极限限位装置,当大车走行到极限位置碰触到此装置时,大车走行电源切断,走行停止。
2.3.4 吊篮机构控制
操作台上设有“机构选择”开关,可以选择吊篮“主吊篮起升”或“主吊篮走行”模式,两者通过程序设置为互锁状态。
当选择“主吊篮升降”模式,“主吊篮走行”禁止动作。主吊篮起升电机左右两侧两台各为一组同步运行,可以选择“联动”档使四台电机同时升降,当两侧出现“一高一低”不平现象时,可以选择左侧或者右侧单独动作,从而来调节吊篮的平稳性。
当选择“主吊篮走行”模式,“主吊篮升降”禁止动作。主吊篮走行四台电机同时走行,可以通过“速度给定”旋钮给定走行速度。
2.4 电气安全保护装置
2.4.1 高压报警系统
由于检查车下方是高压接触网,因此本机设置了高压报警系统。此智能预警系统分为两个发射模块(检测端)和接收模块(接收端),2.4G 无线传输方式,无障碍情况下传输距离可达200 米,满足现场距离要求。接收模块装在控制柜内,发射模块装在吊篮底部。
防触电预警器可以放在工作人员口袋或者安全帽内,便于实时提醒工作人员注意当时电压等级,保护自身安全。报警系统能在距离高压接触网2 米外开始报警提醒操作人员注意,1 米外时接收模块发出限动指令,保护设备及人员安全。
2.4.2 大风报警系统
在检查车上车体上装有风杯检测风速,风力等级可在触摸屏上显示。当风速超过规定时,发出报警和限动信号,防止意外发生。
2.4.3 各机构安全装置
大车走行机构、吊篮走行机构和吊篮升降机构均设有极限限位装置,使检查车在安全范围内工作。操作台设有声光报警系统,当系统出现故障时,发出声光报警,提醒操作人员注意。
3 检查车电气系统特点
3.1 自动调平功能
为了使检查车的调平系统更加智能化,本机设置了自动调平机构。下车体安装的角度传感器可以实时的测量爬坡角度,并将角度模拟量信号传给控制器,控制器将收集到的信号和“零位校正”角度进行对比计算,然后经过输出信号对伸缩杆电机进行控制。
3.2 走行轮压力显示及报警
安装于走行轮处的32 个轮辐式压力传感器可以实时检测走行轮的附着力,并且在触摸屏上显示出来,如果有超过或者低于设计基准值时,会发出报警信号,并且限制整车运行。
3.3 高压电报警
由于检查车运行的下方是高压接触网,需在它的安全范围内进行检查维修工作。本车的高压电报警系统可以有效的防止吊篮运行到高压接触网的放电危险空间,并且配有声光报警系统提醒工作人员注意,可靠的保证了工作人员的人生安全。
[1]傅德源.实用起重机电气技术手册[S].2 版
[2]SIMATIC S7-200 可编程控制器[S].西门子(中国)有限公司.
猜你喜欢
中国民间疗法(2021年5期)2021-06-09
运输经理世界(2021年2期)2021-03-06
快乐语文(2020年36期)2021-01-14
机械工程与自动化(2020年4期)2020-08-25
四川水泥(2019年7期)2019-02-17
中国特种设备安全(2018年10期)2018-12-18
森林工程(2018年4期)2018-08-04
中小企业管理与科技(2018年23期)2018-02-07
航天工业管理(2017年4期)2017-05-12
启蒙(3-7岁)(2017年9期)2017-02-26