基于单边攻角特性的吸气式飞行器下压制导律设计与仿真
2014-12-05 05:10雷延花韩英宏严佳民廖选平
航天控制 2014年5期
梁 卓 雷延花 韩英宏 严佳民 廖选平
中国运载火箭技术研究院,北京100076
对于一类只有单边攻角特性的吸气式飞行器:一方面,由于进气道设计的限制,为保证飞行器在整个飞行过程中发动机正常工作,需确保发动机攻角极性保持不变,同时将侧滑角稳定在0°附近,需采用BTT 制导模式[1-3];另一方面,飞行器飞行过程中不可避免地存在拉起和下压2 种形态,相应地存在正攻角和负攻角2 种模态。为确保只具有单边攻角特性的飞行器实现拉起和下压,需采用BTT-180制导模式,在下压时进行180°滚转,利用正攻角进行下压[4]。为保证下压段滚动过程的平稳性,需对滚动时间进行优化,因此,本文在飞行器滚动过程中引入模糊控制,根据起控点的滚动角和滚动角速度优化滚动时间,提高滚动过程的平稳性,为实现对目标的精确打击创造有利条件。
1 下压段制导律设计
飞行器与目标几何关系在纵向平面内的投影如图1 所示。
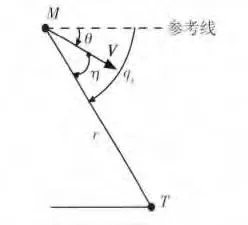
图1 弹目几何关系图
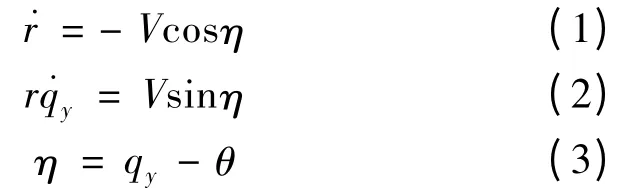
其中,M 为飞行器;T 为目标;r 为飞行器与目标相对距离;V 为飞行速度;qy为目标视线高低角(约定由参考线逆时针旋转至弹目连线为正);η 为速度矢量前置角(约定由速度方向逆时针旋转至弹目连线为正(负));θ 为弹道倾角。
几何关系可描述为
对式(2)微分,有

将式(1)~(3)代入式(4),有

对式(5)建立线性最优二次型目标函数,并进行逆Riccati 积分得到

纵向指令过载

同理可得侧向指令过载

2 BTT-180 制导律设计
由最优比例导引律解算得到弹道坐标系下的纵向过载ny_h和侧向过载nz_h,计算总攻角α 和速度倾斜角ν。在此基础上,根据弹体坐标系(B)、速度坐标系(V)与发射坐标系(G)之间的转换关系计算俯仰角ϑ、偏航角ψ 和滚动角γ。
2.1 总攻角指令和速度倾斜角计算
(1)总攻角
纵向和侧向合成指令过载为

对应的总攻角指令

(2)速度倾斜角解算

2.2 滚动角指令、俯仰角、偏航角解算
(1)滚动角指令
弹体坐标系(B)、速度坐标系(V)与发射坐标系(G)之间的转换关系为BG = BV·VG。
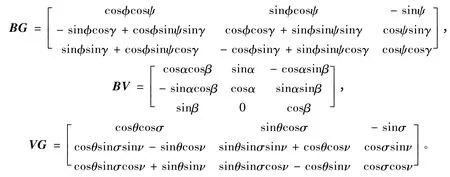
式中,- sinψ = cosαcosβ(- sinσ)+ sinαcosσsinν + (- cosαsinβ)cosσcosν。
由此得到,

则滚动角指令计算方法如下

由此得到BTT 制导指令为
(2)俯仰角计算

式中,

(3)偏航角计算

式中,

2.3 基于模糊逻辑的滚动控制律优化
下压时,为确保发动机单边正攻角特性,进行180°弹体滚动,利用正攻角实现下压。滚控方程描述如下:
在滚动过程中,为确保下压段滚动过程的平稳性,在飞行器滚动过程中引入模糊控制器,根据下压开始时刻(即180°滚动起控时刻)滚动角γ0和滚动角速度优化滚动时间Δt,t0表示起控时刻。
考虑到所设计的控制器需要满足飞行控制的实时性要求,故采用离线计算、在线查表的模糊控制方法。即可以针对输入情况的不同组合离线计算出相应的控制量,从而组成一张控制表,实际控制时只需查表即可,避免了大量的在线计算。
NB:负大;NM:负中;NS:负小;ZR:零;PS:正小;PM:正中;PM:正大。
输入变量和输出变量的论域为[-3,3],模糊推理规则运用肯定式:
Ri:若σ 是Ai且˙σ 是Bi,则ufuzzy是ci。其中Ai,Bi是模糊子集,ci为第i 条模糊控制规则。由此得出表1 所示的模糊控制规则表。
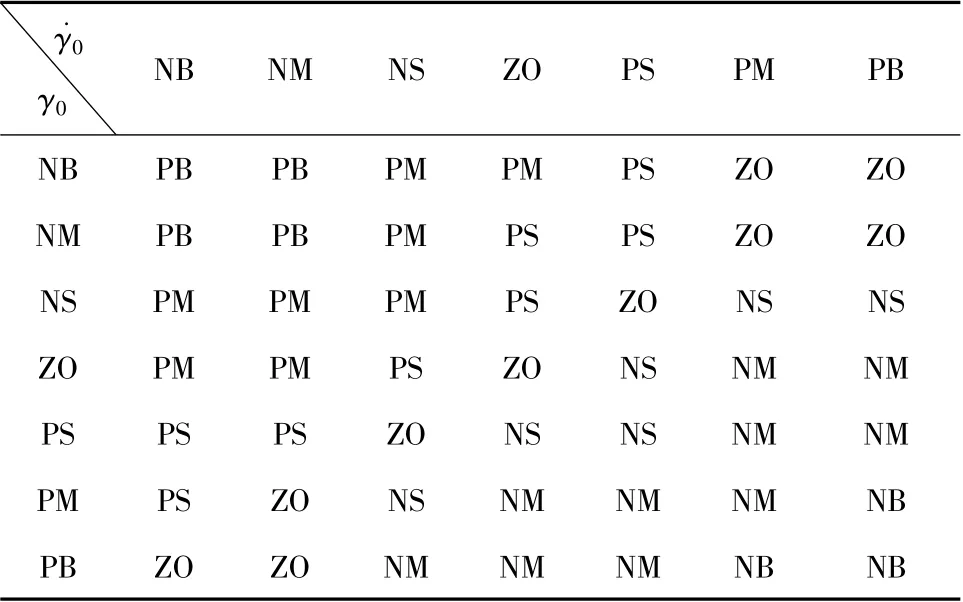
表1 模糊控制规则表
模糊化方法采用重心法,模糊控制器输出变量为
其中,μi为第i 条模糊规则的隶属度,n = 49 ,为模糊控制规则总数。
3 仿真算例与分析
为考核下压段BTT -180 制导律的有效性,并验证基于模糊逻辑的滚控正确性,需考虑180°滚动起控时滚动角取不同值状态下的仿真工况。因此,综合以上要求,分别进行横向不机动和横向机动10km 这2 种工况下压段飞行轨迹仿真。在不考虑偏差和干扰条件下,横向不机动时,起控时滚动角为0;横向机动时,起控时滚动角不为0。
横向不机动和横向机动10km 这2 种状态下180°滚动开始时的滚动角初值和滚控时间见表2,主要仿真结果如图2 ~5 所示。
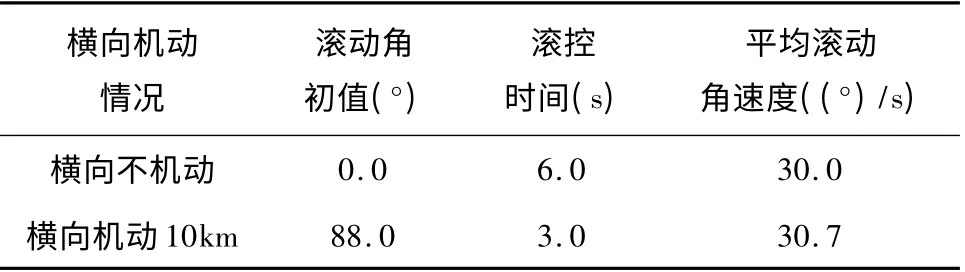
表2 滚动角初始值和滚控时间
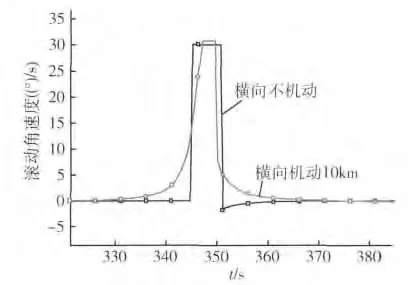
图2 滚动角速度-时间曲线
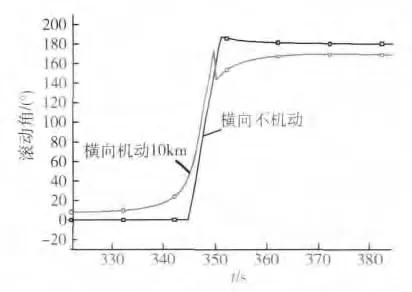
图3 滚动角-时间曲线
由以上仿真结果可以看出:
1)下压段采用正攻角实现了下压,表明BTT-180制导律数学模型的正确性;
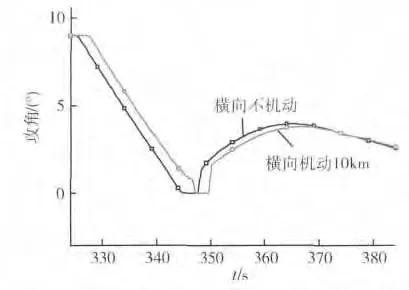
图4 攻角-时间曲线
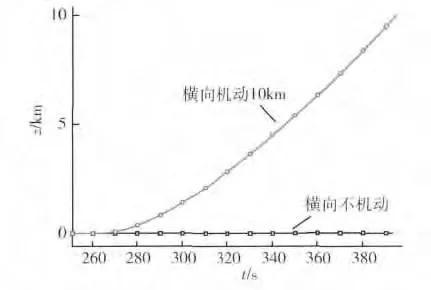
图5 横向位置-时间曲线
2)以开始180°滚动时的初始滚动角和初始滚动角速度为观测量,基于模糊控制方法在线调整滚控时间,可实现滚控过程的平稳性。
4 结论
以一类只有单边攻角特性的吸气式飞行器为研究对象,提出了一种基于模糊控制的下压段BTT -180 制导律设计方法,采用模糊控制完成了下压飞行段飞行器180°的平稳滚动,利用正攻角实现了飞行轨迹下压。最后以2 种典型工况为例,进行了数学仿真,仿真结果说明了该方法的合理性与有效性。同时该方法算法简单,自适应性强,因此具有一定的工程应用前景。
[1]段磊.一种针对采用冲压发动机的远程空空导弹末段制导算法研究[J]. 科学技术与工程,2012,12(27):7013-7018. (Duan Lei. Research on Terminal Guidance Algorithm for Ramjet-powered Airborne Missiles[J].Science Technology and Engineering,2012,12(27):7013-7018.)
[2]Asif Farooq,David J N Limebeer. Bank-to-Turn Missile Guidance with Radar Imaging Constraints[J]. Journal of Guidance,Control,and Dynamics,2005,28(6):1157-1170.
[3]田国兵.带落角约束的BTT 飞行器制导控制一体化方法研究[D].哈尔滨工业大学,2011. (Tian Guobin.Integrated Guidance and Control for BTT Missile with Terminal Impact Angle Constraint[D]. Harbin Institute of Technology,2011.)
[4]叶振信,李传峰,傅维贤.大气层内无动力滑翔炸弹倾斜转弯控制设计[J]. 导弹与航天运载技术,2010(6):6-9.(Ye Zhenxin,Li Chuanfeng,Fu Weixian.Bankto-Turn Control Design for No -power Gliding Bomb inside Atmosphere[J]. Missiles and Space Vehicles,2010(6):6-9.)
[5]钱杏芳,林瑞雄,赵亚男.导弹飞行力学[M].北京:北京理工大学出版社,2000. (Qian Xingfang,Lin Ruixiong,Zhao Yanan. Missile Flight Dynamics[M].Beijing:Publishing Company of Beijing Institute of Technology,2000.)
[6]赵汉元.飞行器再入动力学和制导[M].长沙:国防科技大学出版社,1997. (Zhao Hanyuan. Vehicle Reentry Dynamic Properties and Guidance[M]. Changsha:Publishing Company of National University of Defense,1997.)
猜你喜欢
数学物理学报(2021年3期)2021-07-19
工程与建设(2019年5期)2020-01-19
宇航总体技术(2019年5期)2019-10-11
北京航空航天大学学报(2017年7期)2017-11-24
厦门理工学院学报(2016年1期)2016-12-01
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
湘潭大学学报(哲学社会科学版)(2015年5期)2015-11-25
振动与冲击(2015年2期)2015-05-16