基于支持向量机的冗余陀螺故障诊断方法
2014-08-11 11:22梁海波吕章刚司文杰
航天控制 2014年5期
梁海波 许 昊 吕章刚 李 浩 司文杰
1. 北京航天自动控制研究所,北京 100854 2. 宇航智能控制技术国家级重点实验室,北京 100854
基于支持向量机的冗余陀螺故障诊断方法
梁海波1,2许 昊1吕章刚1李 浩1司文杰1
1. 北京航天自动控制研究所,北京 100854 2. 宇航智能控制技术国家级重点实验室,北京 100854

为了弥补最优奇偶向量法在冗余陀螺故障诊断中存在的不足,提出了基于支持向量机的故障诊断方法。在最优奇偶向量法的基础上,将冗余陀螺测量单元中所有陀螺的奇偶残差看做整体,作为多故障支持向量分类机进行训练数据,并从训练数据预处理、核函数选择和参数寻优等方面进行了研究。将训练后的支持向量分类机用于对九陀螺冗余测量单元的故障诊断试验,试验结果表明,该方法具有良好的故障识别率、较低的漏检率和虚警率。
故障诊断;冗余陀螺;支持向量机;最优奇偶向量法
陀螺作为飞行器控制系统的重要仪表,其可靠性的高低直接关系到飞行器任务完成的质量,在极端情况下陀螺的故障将导致飞行任务失败。通常,可以通过陀螺冗余容错技术来提高其可靠性。随着计算机技术的不断发展,较为复杂的容错算法已不再是制约冗余容错技术发展的瓶颈,因此发展前景愈加广阔。
冗余陀螺测量单元的在线故障诊断方法作为冗余容错的核心技术之一,目前较常用的是最优奇偶向量法(Optimal Parity Test, OPT)[1]。OPT方法根据事先定义的性能评价指标函数,首先设计一个最优奇偶向量,使该向量只对某一个特定的陀螺故障敏感,而对其余陀螺故障和量测噪声不敏感,然后对各个冗余陀螺的奇偶残差进行计算,通过对奇偶残差中绝对值或平方值的最大值进行判断,来实现故障诊断和隔离[2]。由于OPT法将故障检测和隔离一并进行,使用时更加简便,越来越多的学者更倾向于采用OPT法。但是,OPT法在具有较高的正确检测率和正确识别率的同时,也提高了虚警率,即实际检测结果的虚警率高于给定值[3],仍存在改进的空间。
为了弥补OPT法的不足,在OPT法求取奇偶残差的基础上,将支持向量机理论引入到冗余陀螺测量单元的故障诊断中,提出一种基于支持向量机的冗余陀螺测量单元故障诊断方法,并用于九陀螺冗余测量单元的故障诊断。
1 九陀螺冗余测量单元
九陀螺冗余测量单元本体坐标系Oxyz与载体坐标系Oxbybzb重合,如图1所示,9个单轴陀螺按G1,G2,… ,G9的顺序编号。陀螺测量单元的配置方式为:正交陀螺(G1,G4,G7)的敏感轴分别与本体坐标系Oxyz的各轴平行,然后以从本体坐标系的原点出发并与3个坐标轴的夹角相等的射线OO′为轴,旋转40°得到正交陀螺(G2,G5,G8)的位置,再次旋转40°得到正交陀螺(G3,G6,G9)的位置。显然,(G1,G4,G7) 3个陀螺沿本体坐标轴的3个坐标轴正装,而其余的2组陀螺(G2,G5,G8)和(G3,G6,G9)相对于本体坐标轴来讲是斜装,但每组陀螺各敏感轴之间是正交的。
从几何角度看,该配置方式包含斜置圆锥体和正方体2种几何元素。圆锥体顶点与正方体底面重合于点O,圆锥体顶点到底面圆心的连线与正方体的体对角线OO′重合,沿正方体3个边定义的坐标系Oxyz同时也位于圆锥面上。9个陀螺与圆锥体顶点O等距,且均匀分布在圆锥体的锥面上,各陀螺敏感轴背离圆锥体顶点呈向外辐射状。

图1 九陀螺冗余配置方式

(1)
式中,ξ1x表示1号陀螺敏感轴与本体坐标系Oxyz中Ox轴的夹角,其余类同。经过几何计算可知,9个陀螺中两两相邻的陀螺敏感轴之间的夹角是相等的,角度值为α=32.43°;斜装陀螺G2,G3分别与Oz轴的夹角相等(其余陀螺与此情况相同),角度值为β=107.05°;任意2个间隔陀螺(如G1与G3)的夹角均相等,角度值为θ=64.26°。因此,测量方程可写成
(2)
将角度值α,β和θ代入式(2),得到测量矩阵
(3)

E{ζ}=0,E{ζζT}=σ2I9
(4)
得到9个陀螺的精确测量方程为
(5)
利用最小二乘估计
(6)
显然,9个陀螺中只要有3个没有失效,便可保证载体系Oxbybzb下三轴角速度的正确测量。
2 支持向量分类机
支持向量机(Support Vector Machine, SVM)是根据统计学习理论中的结构风险最小化原则提出的,在很大程度上解决了以往很多机器学习方法中无法解决的问题(诸如模型选择与过学习、非线性和维数灾难、局部极小值等),并且使算法本身的推广能力有显著提高[3]。
按照用途划分,支持向量机可分为分类机和回归机2种。支持向量分类机的基本工作原理是:通过某种事先选择的非线性映射(即核函数),将输入空间映射到一个高维特征空间,然后在特征空间中构造出最优的分类超平面。理论上,支持向量分类机的研究多针对二类分类问题,但在工程实践中更常见的是多类分类问题。目前常用的方法是通过多个二值子分类器的组合来构造多值分类器[4]。
(7)
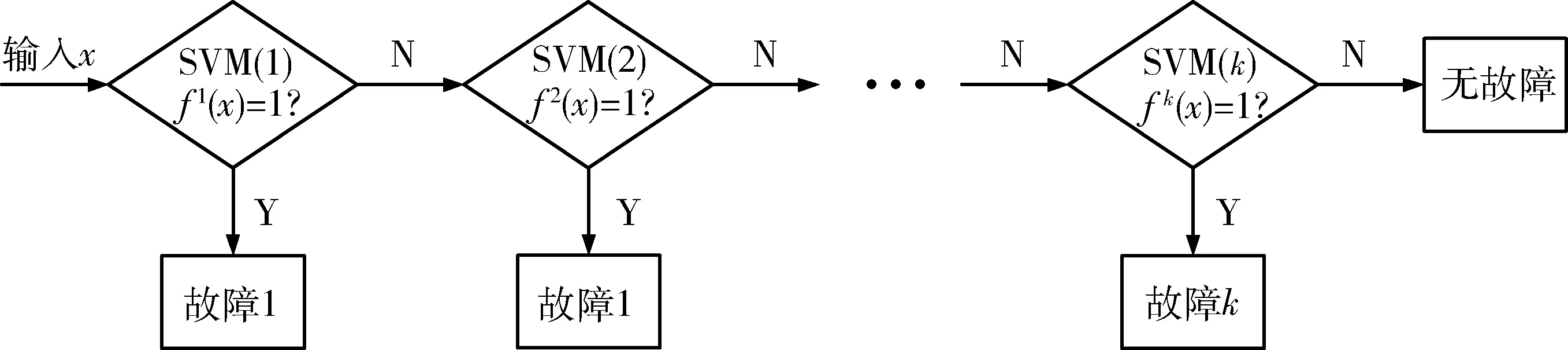
图2 冗余陀螺测量单元的故障诊断算法流程图
3 故障诊断算法设计
3.1 总体设计
故障诊断算法的作用在于实时判断9个陀螺的工作状态是否正常,如果存在故障,故障诊断系统能够及时准确地识别故障陀螺,并将其隔离,从而保证冗余陀螺测量单元的正常运行。
在OPT法中,根据9个陀螺的奇偶残差分别独立地进行故障诊断,但由于最优奇偶向量之间互相不独立,不可避免地会造成虚警。为了弥补这一不足,引入基于SVM的多故障分类器,将9个陀螺的最优奇偶残差作为一个整体,用于对多故障分类器的训练。通过对多故障分类器中各子SVM的参数寻优,获得分类器的最优工作状态,以此达到提高故障诊断率和降低虚警率的目的。多故障分类器在结构上采用形如图2的形式,构建9个子SVM,每个子SVM对应1个故障陀螺的故障诊断算法。
3.2 基于SVM的故障诊断算法
3.2.1 训练数据预处理
SVM在训练之前,对训练数据进行预处理是十分必要的。这样做的优点有2点:1)可以避免在训练数据空间中,较大的数据与相对较小的数据在数值上相差悬殊,影响分类结果;2)可以避免由于引入数值过大的数据而增加计算难度,造成数据溢出。这里将数据标准化到[-1,1]或[0,1]范围内[6],处理方法如下:
(8)
其中,X,Xscaled分别为原始训练数据和预处理后的数据;Xmax,Xmin分别为原始数据中的最大值和最小值;Bupper,Blower分别为期望预处理结果的上界和下界值。
需要指出的是,用于训练和测试的数据要采用相同的方法一同进行预处理,这样才能保证分类结果的可信度。
3.2.2 核函数的选择
支持向量机算法在应用时,需要选择合适的核函数。尽管在理论上,只要满足Mercer条件的函数都可以作为核函数[7-8],但不同核函数所产生的性能是不同的。
这里,选取径向基函数(Radial Basis Function, RBF)核,即
(9)
其中,γ为核函数参数。RBF核函数有以下优点:
1) RBF核函数能够将数据映射到高维空间,特别适用于分类结果与数据分布满足非线性关系的情况;
2) RBF核函数只有一个待定参数γ,相比其它的核函数,复杂程度能够有效降低;
3) 使用RBF核函数,不会由于计算过程中产生无穷大而导致最终无解的情况,使用风险较低。
3.2.3 参数寻优
SVM的参数选择可以看作一个寻优过程,这里,采用三步搜索法进行参数选择[9]。三步搜索法具有计算简单、计算次数少、性能良好的特点,搜索步骤如下:
1) 分别选取C和γ的取值区间,并等步长选取若干点,构成参数对(C,γ);
2) 在C和γ构成的二维平面上,以分类准确率最高为准则进行搜索,找到相对最优点;
3) 以相对最优点为中心,分别将C和γ的步长缩小一半,取周围10个点,再进行搜索,找到分类准确率最高的点;
4) 重复第3)步,直到步长小于1个单位;
5) 如果分类精度没达到要求,则返回第1)步继续寻找;如果达到要求,则作为最终结果。
4 试验与结果分析
4.1 训练样本的确定
根据改进型一对多算法,建立形如图2所示的由9个子SVM组成的多故障支持向量分类机。针对九陀螺冗余测量单元的故障诊断,建立9个故障类别(分别对应9个陀螺的故障)。多故障支持向量分类机以9个陀螺的最优奇偶残差为一个整体,作为支持向量机的输入量,这样做的好处在于不必考虑9个残差的相关性和极值的分布问题。
假设9个陀螺采样频率为50Hz,9个陀螺的测量噪声统计特性相同,且服从高斯分布,其标准差为σ=50(°)/h。对陀螺故障向量取f=2σ,并分别设置各陀螺依次发生阶跃型故障的情况各4s(从第2s开始发生阶跃型故障),由此获得9个陀螺在故障情况下的残差,作为9个子SVM的训练数据,并采用式(8)的方法对数据进行预处理。以第1号陀螺发生故障为例,经过预处理的训练数据如图3所示。
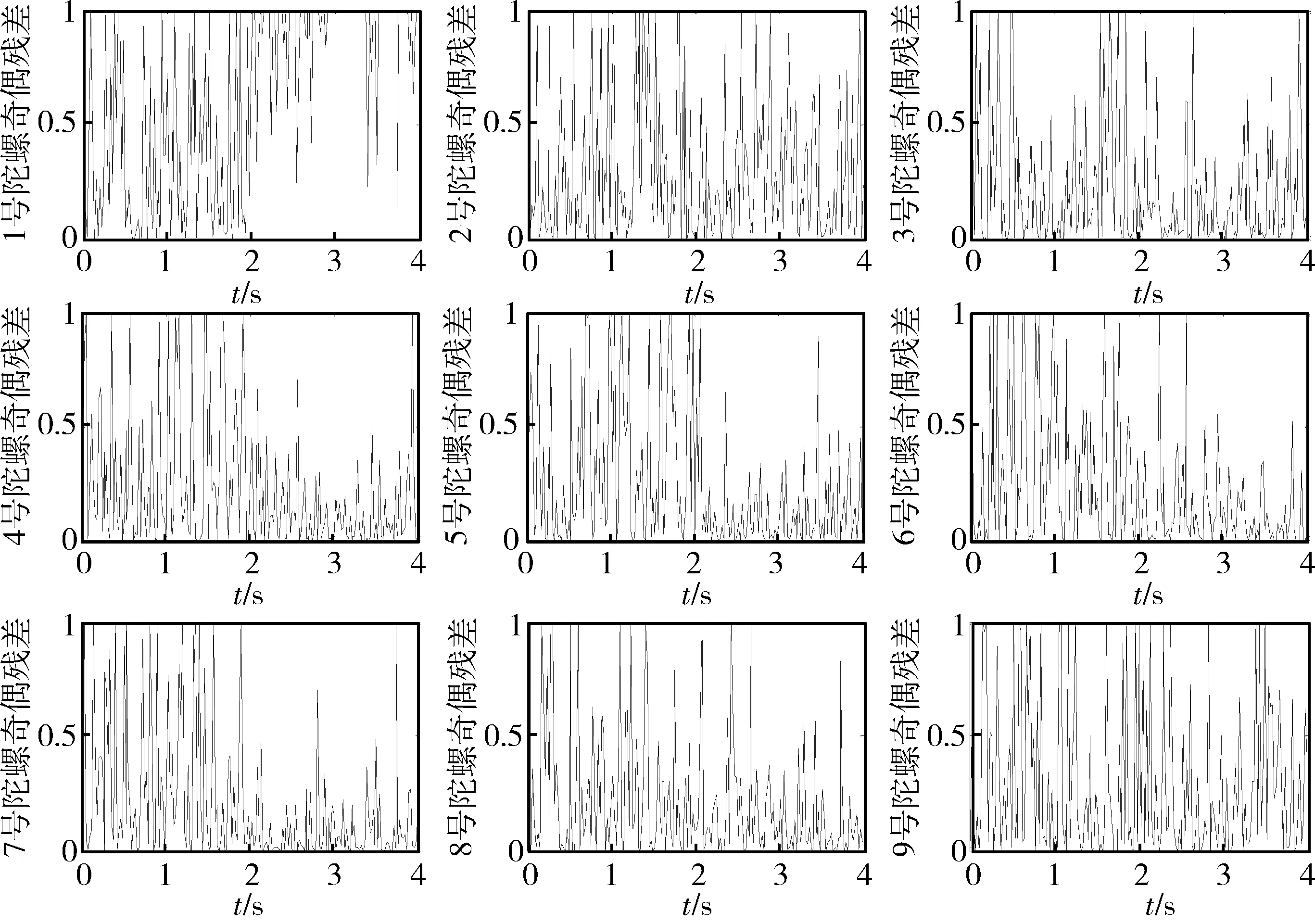
图3 1号陀螺故障时的训练数据
4.2 多故障分类机的训练
利用三步搜索法,分别对9个子SVM进行参数寻优,同时使用支持向量记数法对推广能力进行评估[8],得到各SVM的最优参数如表1所示。
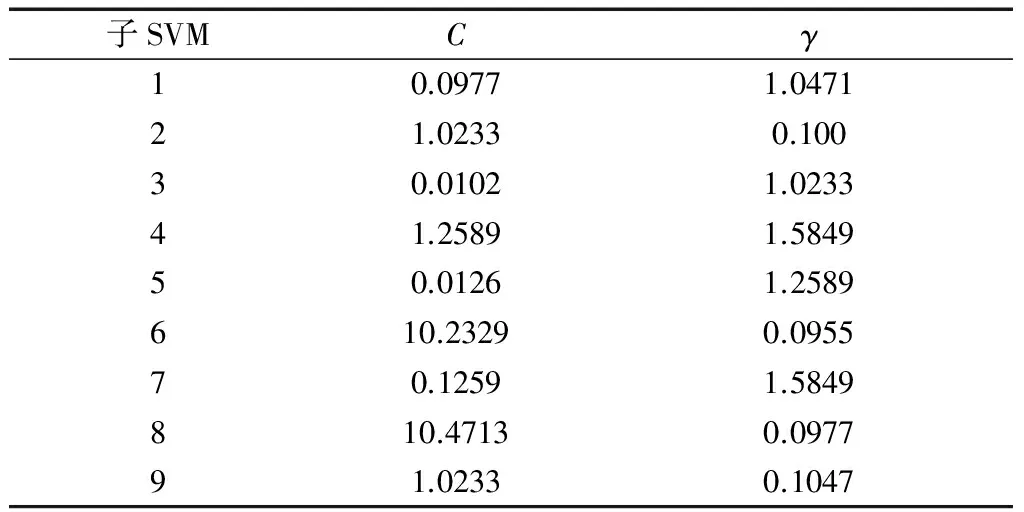
表1 各子SVM的参数寻优结果
在获得表1所示最优参数的同时,也完成了对9个子SVM的训练,训练数据中隐含的各种故障分类信息体现在支持向量上,由此便获得了相应的决策函数,用于故障诊断。
4.3 故障诊断结果及分析
考虑到每个陀螺都存在发生故障的可能,分别构建9个陀螺系统的故障数据。将仿真时间设置为100s,从第50s开始依次令9个陀螺发生故障,且故障的信噪比(Signal Noise Ratio, SNR)分别取1,2,3,…,9,10。这相当于针对每个陀螺发生故障的情况分别进行5000次Monte-Carlo仿真,9个陀螺的故障诊断试验结果分别列于表2~4。

表2 不同故障信噪比条件下各陀螺的故障漏检率 单位:%
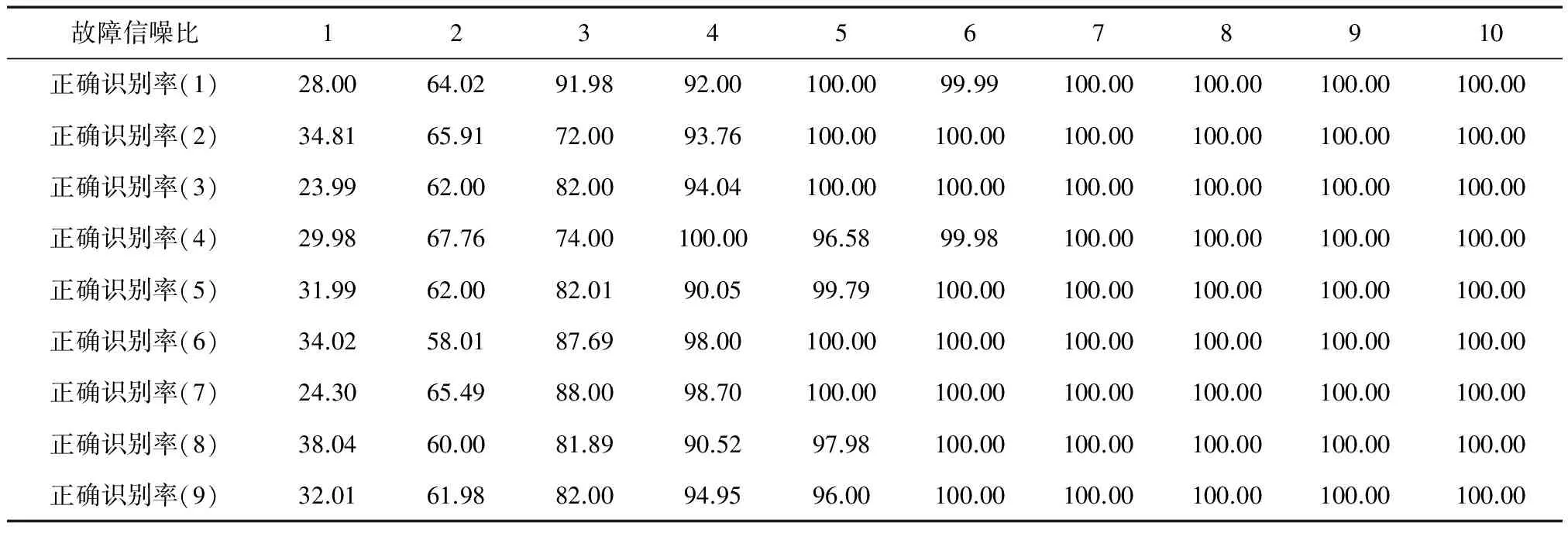
表3 不同故障信噪比条件下各陀螺的故障正确识别率 单位:%
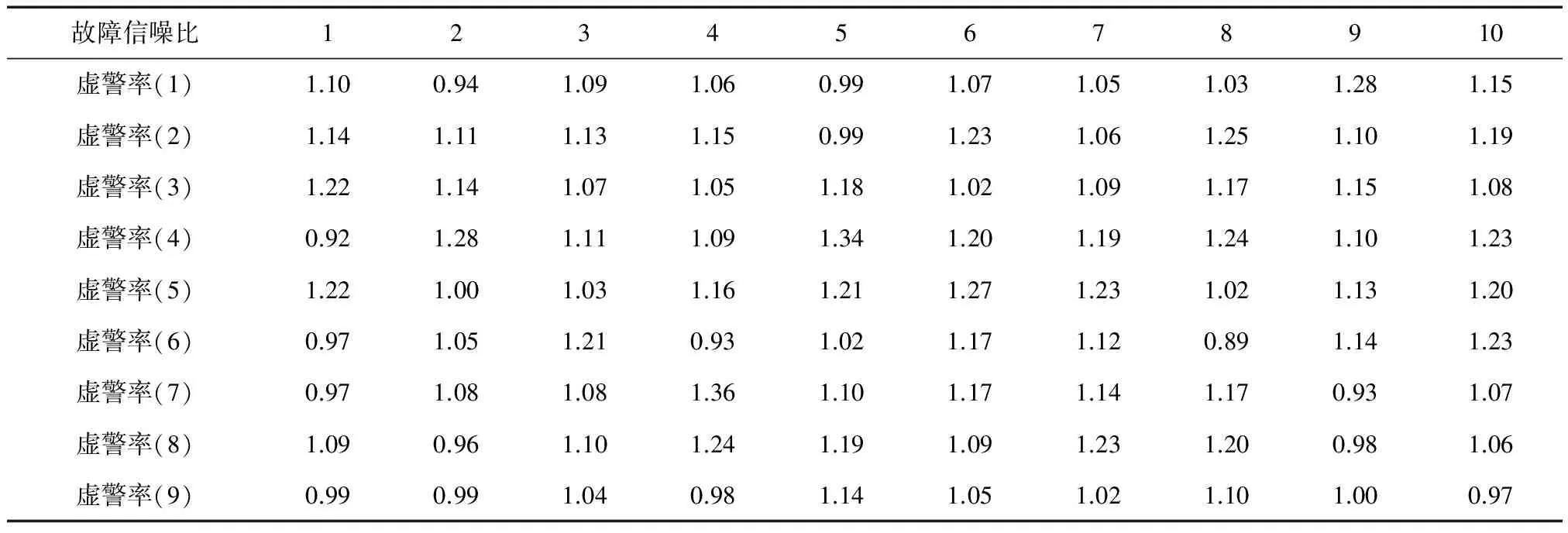
表4 不同故障信噪比条件下各陀螺的故障检测虚警率 单位:%
试验结果表明:
1) 随着故障信噪比的增大,漏检率随之减小,当SNR=6时,漏检率已趋于0;
2) 随着故障信噪比的增大,故障正确识别率显著提高,当SNR=6时,正确识别率已趋于100%;
3) 随着故障信噪比的增大,虚警率无明显变化趋势,维持在1.4%以下。
这说明,采用SNR=2时的陀螺测量奇偶残差对各SVM进行训练,相对无故障时的奇偶残差,训练数据数值仍不够显著,使得故障诊断性能不尽如人意,表现在故障识别率集中在60%左右,漏检率维持在40%左右的水平。但从SNR=3开始,随着SNR的增大,故障诊断性能得到显著提高。
此外,基于SVM的故障诊断方法,不需要将奇偶残差的未知相关性进行定量分析研究,而是将奇偶残差作为整体对SVM进行训练,将训练数据和判决结果之间的非线性关系涵盖其中,从而使虚警率大大降低,这充分体现了智能数据挖掘理论的优势。
不论从漏检率、故障识别率,还是在虚警率等指标上,基于SVM的故障诊断方法无疑具备更优秀的故障诊断性能。
5 结束语
针对OPT故障诊断方法存在的不足,提出了基于SVM的故障诊断方法。从故障诊断算法总体设计、训练数据预处理、核函数选择、参数寻优等方面进行了研究,通过故障诊断试验,表明基于SVM的故障诊断方法具有良好的故障识别率、较低的漏检率和虚警率。
[1] 贾鹏,张洪钺.基于冗余惯性组件故障诊断方法的比较研究[J].系统仿真学报,2006,18(S2):274-278.(JIA Peng, ZHANG Hongyue. Comparative Research of Fault Detection Methods Based on Redundant Inertial Measurement Unit[J]. Journal of System Simulation, 2006,18(S2):274-278.)
[2] 杨柏军,潘鸿飞,才晓锋.惯性冗余系统奇偶向量法故障检测与识别技术研究[J].战术导弹技术,2009,(4):68-72.(YANG Baijun, PAN Hongfei, CAI Xiaofeng. Study of Fault Detection and Recognition Technique in Inertial Redundancy System Based on Parity Vector[J]. Tactical Missile Technology, 2009,(4):68-72.)
[3] 张玲霞.导航系统故障检测与诊断及其相关理论问题的研究[D].西北工业大学,2004:2-10. (ZHANG Lingxia. Research on Fault Detection and Diagnosis of SINS and Related Theory[D].Northwestern Polytechnical University, 2004:2-10.)
[4] 史贤俊,林慧博,张小伟.基于支持向量机的模拟电路故障诊断方法[J].兵工自动化,2009,28(4):79-81.(SHI Xianjun, LIN Huibo, ZHANG Xiaowei. Fault Diagnosis Method of Analog Circuit Based on SVM[J]. Ordnance Industry Automation, 2009,28(4):79-81.)
[5] 袁胜发,褚福磊.支持向量机及其在机械故障诊断中的应用[J].振动与冲击,2007,26(11):29-31.(YUAN Shengfa, CHU Fulei. Application Research on Support Vector Machines in Mechanical Fault Dignosis[J]. Journal of Vibration and Shock,2007,26(11):29-31.)
[6] LIN S, LEE Z, CHEN S, et al. Parameter Determination of Support Vector Machine and Feature Selection Using Simulated Annealing Approach[J]. Applied Soft Computing, 2008, (8): 1505-1512.
[7] 邓乃杨,田英杰.支持向量机——理论算法与拓展[M].北京:科学出版社,2009. (DENG Naiyang, TIAN Yingjie. Support Vector Machine——Theory Algorithm and Expansion[M]. Beijing: Science Press, 2009.)
[8] 邢永忠.最小二乘支持向量机的若干问题与应用研究[D].南京理工大学,2009:24-25.(XING Yongzhong.Research on Some Problems and Application of LS-SVM[D].Nanjing University of Science and Technology, 2009:24-25.)
[9] ZHUANG L, DAI H. Parameters Optimization of Kernel-based One-class Classifier on Imbalance Learning[J]. Journal of Computers, 2006,1(7):32-40.
[10] 霍罕妮.支持向量机中参数选取的一个问题[D].大连理工大学,2007:69-70.(HUO Hanni. Method of Optimal Cost and Kernal Parameters Selection in Support Vector Machine[D].Dalian University of Technology, 2007: 69-70.)
《航天控制》杂志
□欢迎订阅□欢迎刊登广告□欢迎投稿
开本:大16开 双月刊 页码:96页定价:20.00元(全年120元)
国内邮发代号:80-338 国外发行代号:BM4668
国内统一连续出版物号:CN11-1989/V 国际标准连续出版物号: ISSN 1006-3242
编辑部地址:北京142信箱402分箱 邮政编码:100854
电话:(010) 68762264、68388585 E-mail: htkz2013@163.com
网址:http://htkz.cn
TheFaultDiagnosisMethodofRedundantGyroscopesBasedonSupportVectorMachine
LIANG Haibo1,2XU Hao1LV Zhanggang1LI Hao1SI Wenjie1
1. Beijing Aerospace Automatic Control Institute, Beijing 100854, China 2. National Key Laboratory of Science and Technology on Aerospace Intelligence Control, Beijing 100854, China
Fortheon-linefaultdiagnosismethodofredundantgyroscopes,theoptimalparitytest(OPT)iswidelyused.BytakingthelimitationoftheOPTintoconsideration,thefaultdiagnosismethodbasedonsupportvectormachine(SVM)isproposed.Firstly,theparityresidualsforallgyroscopesinthenine-redundant-gyroscope-unitaretakenasawholetobethetrainingdata.Thenthetrainingdatapreprocessing,thekernelselectionandtheparameteroptimizationareresearched.Finally,thetrainedSVMisusedforthenine-redundant-gyroscope-unitfaultdiagnostictest.ThetestresultsshowthattheSVMmethodhashighrecognitionrateoffailure,lowmissingrateandfalsealarmrate.
Faultdiagnosis;Redundantgyroscopes; SVM; OPT
2013-12-18
梁海波(1984-),男,天津人,博士,工程师,主要研究方向为MEMS惯性导航与组合导航技术;许昊(1988-),男,北京人,硕士,工程师,主要研究方向为控制系统电气设计技术;吕章刚(1986-),男,山东人,硕士,工程师,主要研究方向为控制系统电气设计技术;李浩(1982-),男,四川人,博士,工程师,主要研究方向为控制系统电气设计技术;司文杰(1982-),男,浙江人,博士,高级工程师,主要研究方向为控制系统电气设计技术。
V441
: A
1006-3242(2014)05-0077-07
猜你喜欢
网络安全与数据管理(2022年3期)2022-05-23
中学生数理化·高一版(2021年1期)2021-03-19
北京航空航天大学学报(2020年10期)2020-11-14
中学生数理化(高中版.高二数学)(2020年9期)2020-10-27
小学生学习指导(低年级)(2019年10期)2019-10-16
中学生数理化·高一版(2019年9期)2019-10-12
自动化学报(2019年6期)2019-07-23
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
快乐语文(2018年36期)2018-03-12