
自重构机器人变形过程运动学分析及越障仿真
2014-12-05 06:55葛为民张华瑾王肖锋雷营林
中国机械工程 2014年19期
葛为民 张华瑾 王肖锋 雷营林
天津理工大学天津市先进机电系统设计与智能控制重点实验室,天津,300384
0 引言
自重构机器人是由多个具有相同功能的模块组成的智能机器人系统,它可以根据工作环境的不同自主变换构型来实现所需功能,在航空航天、灾后救援、极限维护等领域有广阔的应用前景。根据单元模块结构不同,自重构机器人主要分为以下三种[1]:晶格式模块机器人[2]、链式模块机器人[3]、混合式模块机器人[4]。当前国内外对晶格式模块机器人研究较多,但晶格式模块在空间的运动受到栅格约束[5](单元模块必须处于栅格中心才能实现连接),不易到达空间的任意位置,若要到达空间任意位置,需要大量的模块堆积才能实现,而链式和混合式自重构机器人系统仅需数量较少的模块就可以到达空间任意位置。目前,国内外关于机器人的越障研究较多,大多集中在仿生 机 器 人[6]、履 带 机 器 人[7-8]、轮 腿 式 机 器人[9-10]以及月球车[11]等领域,而对 自重构机器人的越障,尤其是越障力学模型、越障条件等的分析较少。
对链式结构的自重构系统的研究必须考虑构型变换过程中的下列问题:①对接面能否到达准确位置并与相应的对接面进行配合;②多模块系统变形过程的运动空间能否保证系统的并行运动不产生干扰;③变形过程中各模块的运动规律是否明确,以便控制。一方面,对系统的变形进行运动学分析是自重构模块机器人实现过程中的一个重要环节;另一方面,在系统的构型变换完成后,能否实现所需运动,是研究中需要明确的。因此,对机器人的运动步态与越障能力的研究也是必要的。
本文基于D-H方法对链式模块构成的蛇形构型(相当于构型中的一条支链)转换为环形构型的重构过程的正运动学问题进行了分析,归纳了变形运动普适公式,利用多体动力学软件Recur-Dyn与MATLAB对变形过程中系统末端对接面的运动轨迹、速度与加速度进行仿真对比,验证了该普适公式的正确性与有效性,同时对环形构型的滚动步态与越障条件做了分析,最后进行了越障运动仿真。
1 自重构机器人模型描述
1.1 单元模块结构与运动方式
该链式单元模块原理与结构简单,其内部结构与外观见图1a、图1b,单元模块主要包括U形外架、U形内架、舵机架、舵机辅架、内架连轴件和舵机。单元模块的尺寸为128mm×100mm×100mm。单元模块之间通过连接孔实现模块之间的对接。模块的连接面同时具有外圈孔及内圈孔,其中一个侧面还可以选择与内架或外架连接,这保证了模块连接的多样性与可靠性。该单元模块具有一个自由度——U形内架可以相对U形外架实现空间360°的转动。单模块运动时,以外架为支撑,内架为驱动,实现刨地前进(图1c),满足了自重构机器人系统运动最基本的条件。
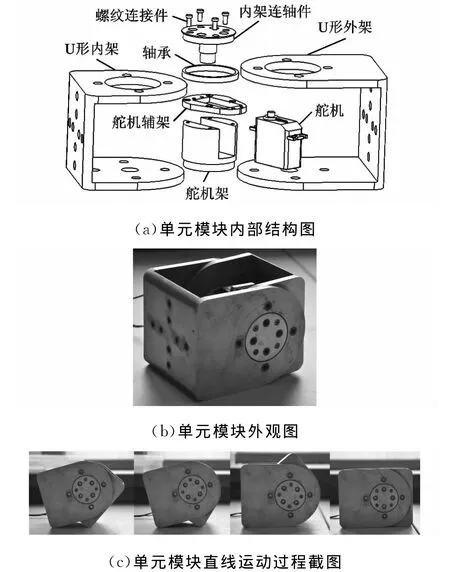
图1 单元模块的三维模型及运动模式
1.2 单元模块的数学描述
在全局坐标系Σ0中对编号为i的单元模块建立图2所示的空间局部坐标系Σi,双U形单元模块的外架与内架分别用Ua和Ub来表示,其5个连接面分别用C0、C1、C2、C3、C4来表示。选取单元模块中间旋转轴的中心点作为局部参考基准的原点Oi,z轴沿中心旋转轴线方向并由连接面C0指向连接面C3,x轴沿水平方向,y轴垂直地面向上。
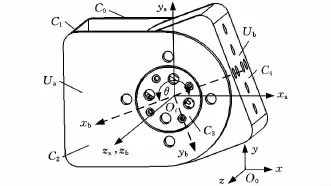
图2 单元模块的空间坐标系
单元模块的齐次坐标变换矩阵[12]为
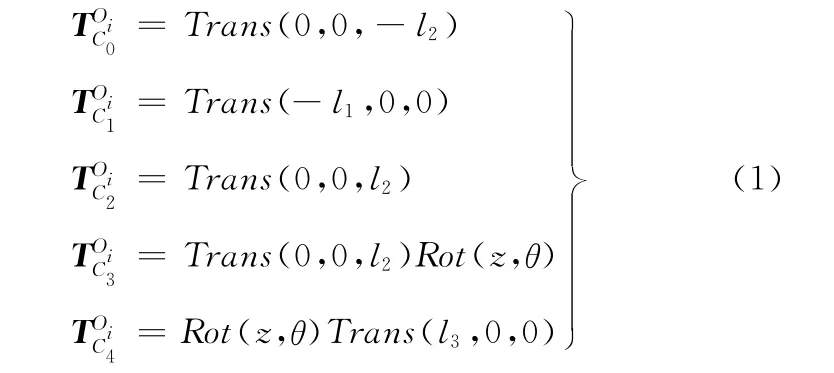
同理,还有以下变换:
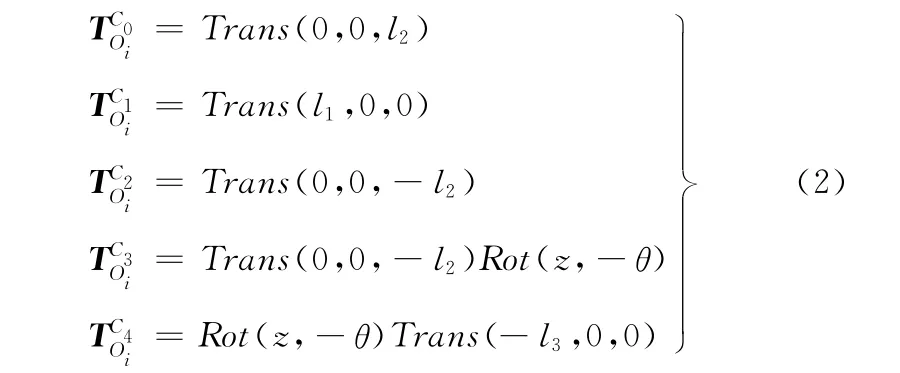
式中,θ为内架相对于外架转动的角度;l1为连接面C1与旋转轴的距离;l2为连接面C0和C2、C3与基准平面Oixy之间的距离;l3为连接面C4与旋转轴之间长度。
2 变形过程运动学分析
本文针对n个首尾相连的模块构成的蛇形构型转化为环形构型的过程进行运动学研究,建立全局平面简化系统模型(图3)。以中心节点(xi,yi)为原点建立局部惯性坐标系。根据其构型得到每个关节在全局坐标系中的位置,则系统的第i+n个关节的几何约束方程为
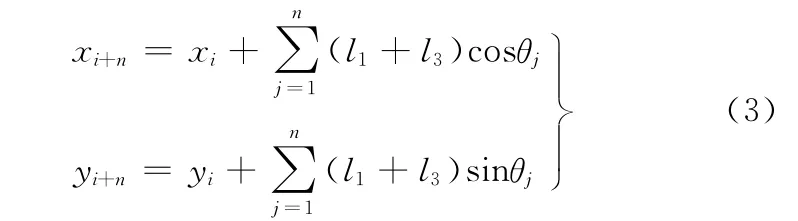
根据D-H方法,对于n个首尾相接的自重构模块链,在它们由直线蛇形变换为环形的重构过程中,第i+n个模块的末端连接面中心的位置为

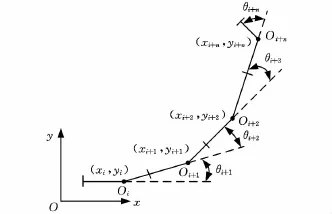
图3 简化二维系统模型图

其中,矢量U1的起点为构型末端模块所在局部坐标系的原点O,终点为连接面C4的中心;Cn,1表示第n个模块的C1连接面;Cn,4表示第n个模块的C4连接面。同理,可以求出任意构型中任意模块上任一点在全局坐标系中的空间坐标。
以图4所示的6模块直线构型变换为环形构型为例,对该系统重构运动学问题进行研究,验证重构过程中模块6的C4连接面能否到达指定位置进行对接。基于全局坐标系,根据式(4),模块6末端的中心在变换过程中的运动轨迹的数学表达式为

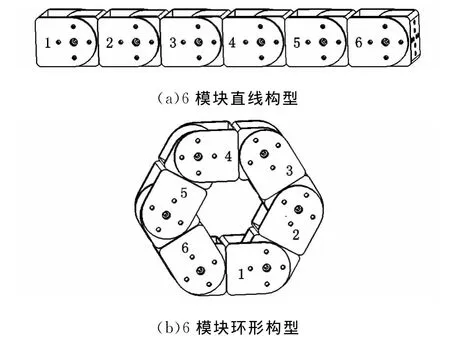
图4 6模块构型变换
对于整个重构系统,在进行运动学分析之前,首先需对整个重构系统进行运动稳定性分析,以防止实际运动中系统的倾翻。本文只选择了系统中的一个支链,因此假定系统在运动过程中地面对系统的摩擦力足够支撑整个机构的运动部分,使系统不发生倾翻。
将相应的坐标变换矩阵代入式(5)并化简求解,可以得到模块6末端中心在全局坐标系中的瞬时位置表达式:
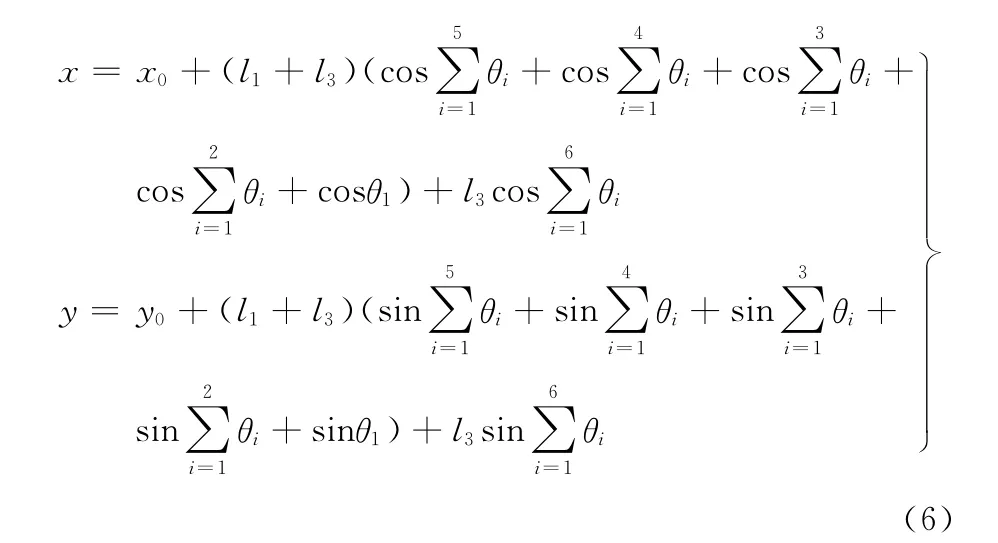
其中,(x0,y0)表示模块1的旋转轴中心在全局坐标系中的初始位置。
同理,根据式(6)可以得到模块6末端中心的瞬时速度表达式:
末端中心的瞬时加速度可表示为
同理,可以求得每个模块末端在构型变换过程中的运动位移、速度、加速度与时间之间的关系。通过对每个模块运动参数表达式的推导,以及数学归纳法证明,得到n个模块组成的自重构模块链在由直线构型变换为环形构型过程中的位移、速度以及加速度的普适公式。
末端连接面中心在全局坐标系中的瞬时位置坐标普适公式为
对式(9)求导,就可以得到瞬时速度普适公式:
瞬时加速度普适公式为
3 变形过程运动仿真分析
通过对直线链式构型变换为环形构型过程运动学普适公式的推导,可以明确各关节的转角变化与其在惯性坐标系当中的位置、速度以及加速度、时间之间的关系。下文给出在不同仿真环境下的仿真结果及对比,以验证普适公式的有效性。仿真环境设置如下:单元模块的数量为6,其中l1=78mm,l3=50mm,连接方式为首尾连接,各关节并行运动,且匀速转动,模块1局部坐标原点在全局坐标系中的初始位置设定为(0,0,0)。
对系统末端的运动轨迹与重构工作空间进行仿真。从图5所示的仿真结果来看,对于模块末端运动轨迹的仿真,MATLAB的仿真结果(图5a)与RecurDyn的仿真结果一致,验证了普适公式描述运动轨迹的正确性。仿真结果准确地反映了末端连接面的运动轨迹,预估了系统重构所需的运动空间,为自重构系统的并行运动控制与重构算法提供了一定的理论依据。
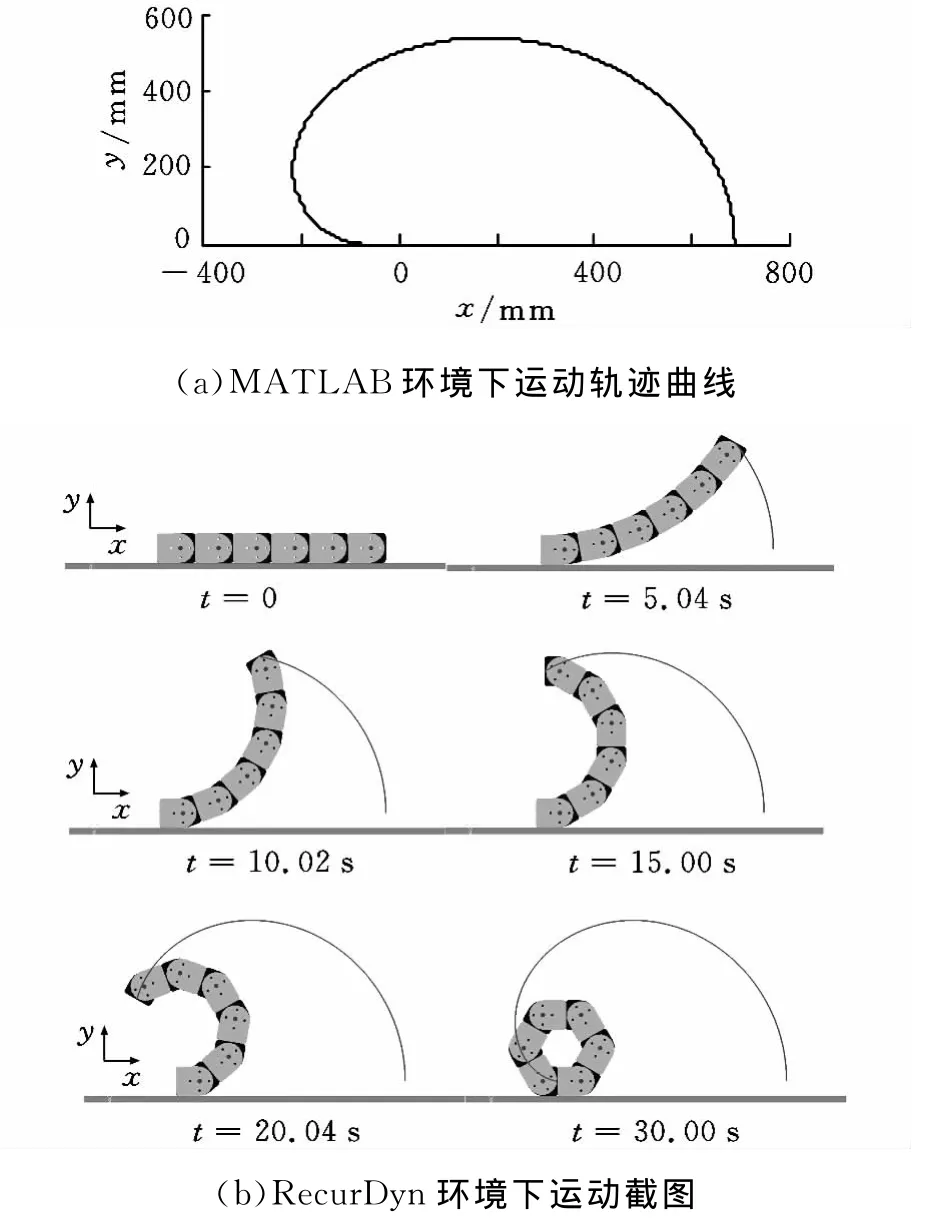
图5 运动轨迹仿真
对末端模块的位移速度与加速度进行了仿真(图6~图8)。图7、图8的仿真结果表明了普适公式对系统末端速度、加速度描述的有效性。速度、加速度作为评价系统稳定性的重要指标,其数学表达式对控制算法的研究有一定的指导意义。
4 环形滚动步态及越障仿真分析
4.1 环形滚动步态分析
环形机器人的滚动是通过对每个模块转角的控制实现的。滚动主要有两种形式:静态滚动与动态滚动[13]。静态滚动只要求对每个关节加上周期的转角变化信号,但必须使重心保持在与地面接触的两个支撑点之间;动态滚动除对关节加周期信号之外,还需通过控制转角的变化来改变环形系统的重心位置,使其落在支撑点的前方,产生力矩,从而推动整个系统滚动。动态滚动与静态滚动在一个周期内的运动方式见图9。
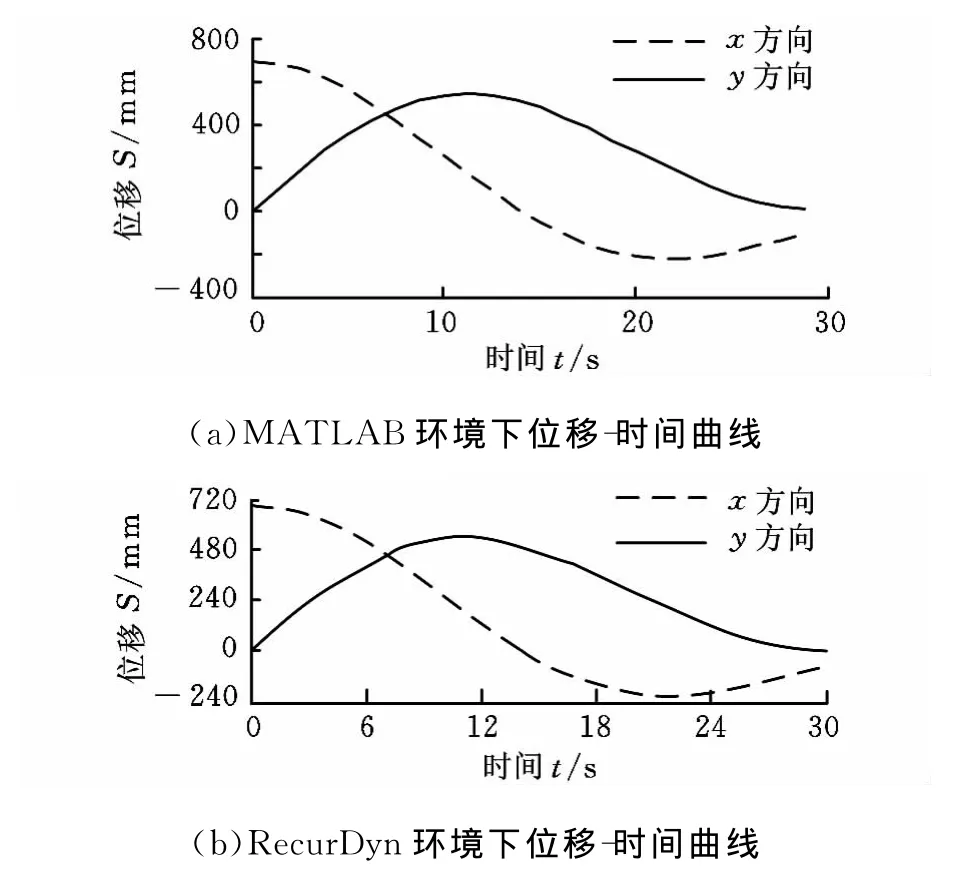
图6 运动位移与时间的关系曲线
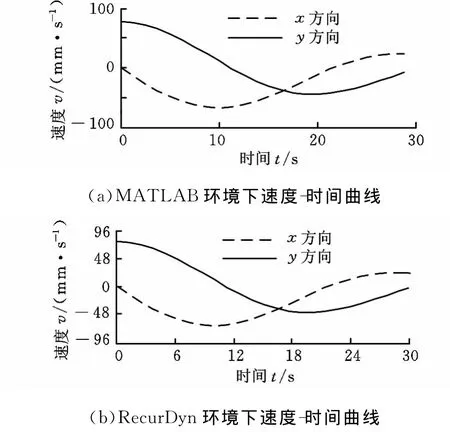
图7 运动速度与时间的关系曲线
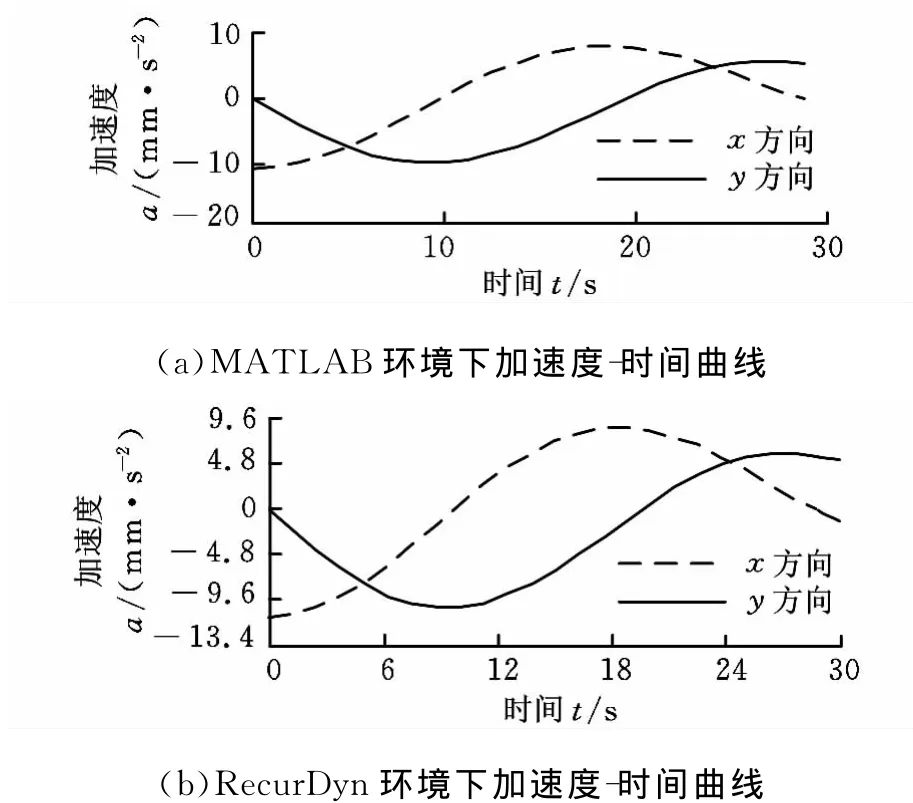
图8 运动加速度与时间的关系曲线
从图9来看,对于6模块组成的环形机器人系统,两种滚动步态都只需对其中四个模块输入转角信号,其转角发生变化带动另外两个关节角度发生变化,实现系统向前滚动。角度变化的快慢决定机器人系统向前运动的速度。通过分析图9就可以将环形系统推广到任意多个模块组成的模块环,并得出滚动步态的运动规律。
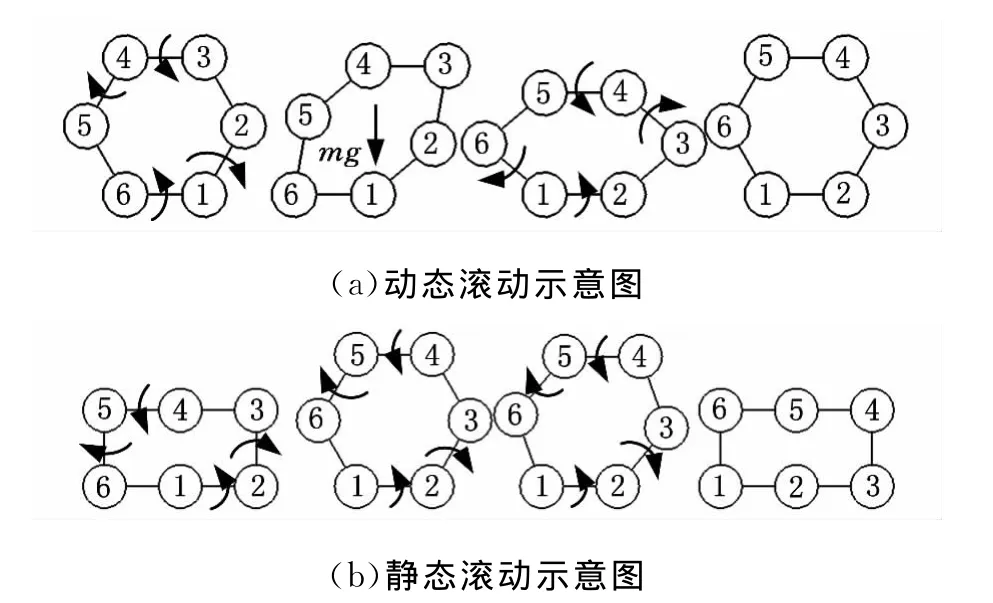
图9 滚动步态示意图
4.2 环形越障分析
对蛇形重构为环形的运动过程进行分析,原因是蛇形构型在越障方面的能力非常有限,而环形构型则有着很强的越障能力。
对于动态滚动越障,其前进的动力主要来自于系统重心变化产生的倾覆力矩。当系统以动态滚动步态翻越台阶时,只有在重心移到台阶与环形系统的支撑点前,并且重力产生的力矩足以克服地面摩擦力产生的力矩时,才能保证系统顺利翻越障碍。对于6模块环形系统(越障力学模型见图10),当环形系统接触到垂直障碍物并恢复到初始正六边形构型时,平衡方程(忽略系统转动副的摩擦)为

式中,f1为障碍物对环形系统的阻力;f2为地面对环形系统的阻力;ft为与地面接触关节的驱动力;N1为障碍物对环形系统的反作用力;N2为地面对环形系统的反作用力;mg为系统所受的重力;h为障碍物的高度;s为系统支撑点到障碍物支撑点的水平距离;sc为系统的质心到障碍物支撑点的水平距离。
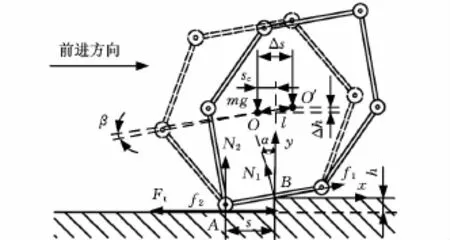
图10 6模块环形系统越障力学模型
在环形越障的过程中,质心在x方向的位置变化为Δs,在y方向的位置变化为Δh,因此,在环形系统翻上垂直障碍物的瞬间,地面对环形系统的反作用力N2=0,其余参数有以下关系:
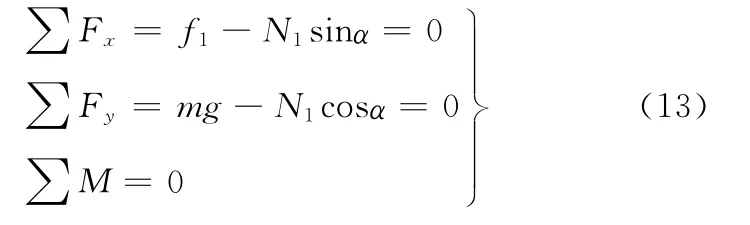
即此时水平方向与竖直方向上的分力矢量和为0,各力对障碍物支撑点的力矩矢量和也为0。而N2=0,除重力外,其余力的方向都通过支撑点,因此,在环形系统翻上障碍物的瞬间,环形系统的质心应与支撑点处于同一水平位置,即环形系统质心O′与支撑点B在x方向的坐标值相同。则当关节继续转动,系统质心位置继续改变时,重力产生倾覆力矩,从而使系统翻上台阶。
由于单元模块结构的限制,在环形构型的滚动中,每个关节最小的夹角(即U形内架与U形外架的最小夹角)为π/2,在滚动越障过程中初始构型的质心位置O到翻越瞬间系统的质心位置O′的距离为l。因此,有以下几何关系:
由式(14)可得到6模块环形系统能翻越垂直障碍的条件:

其中,lmax为系统关节转角到达极限位置(即其中一个关节的U形内架与U形外架的夹角为π/2时,就不能再减小)时的OO′长度;β为OO′连线与阻力f1方向所夹锐角。对于结构确定的系统,lmax与β是一定的,因此,系统能否翻越垂直障碍主要取决于系统与障碍物的水平距离与障碍物的高度。
环形系统以静态滚动步态越障的过程,只需要通过合理的控制各关节转角即可实现,运动过程较为稳定。但由于6模块环形系统模块数量较少,越上台阶同样是通过改变质心的位置实现的,故不再赘述。
当系统处于图11所示初始位置时,最高能够翻越高30mm的台阶,由仿真可得,如果台阶过高,则可能造成以下结果:①当系统关节运动速度较大,即滚动速度较大时,稳定性差,则爬上台阶后环形系统倾翻;②当环形系统与障碍物过近,即s较小时,则爬不上台阶,产生回滚;③若滚动速度较大且与障碍物过近,则爬不上台阶,回滚后倾翻。可见动态滚动越障稳定性较差,对于模块数量较多的环形系统,通过合理控制转角变化及滚动速度,以静态滚动步态则可平稳翻越较高的垂直障碍。

图11 越障仿真
5 结论
(1)本文针对自重构机器人系统建立了全局坐标系,定义了单元模块的连接面与齐次变换矩阵。基于D-H方法,对6模块自重构机器人的蛇形支链变换为环形支链的过程的运动学数学模型进行了推导,归纳了多模块系统在蛇形变为环形的过程中,瞬时坐标、速度以及加速度的普适公式,讨论了其构型变换过程中正运动学的基本问题。
(2)利用仿真软件验证了普适公式的有效性与正确性,明确了多模块系统构型变换过程中运动参数之间的关系,对末端连接面的运动轨迹是否达到目标位置做出了估计,为运动空间的确定提供了依据,为链式自重构系统重构过程的控制算法与控制器的设计奠定了一定基础。
(3)对环形系统滚动的两种步态与越障进行了分析,并对环形系统的越障运动进行了仿真,明确了该变形的意义。
[1]Murata S,Kurokawa H.Self-reconfigurable Robots:Shape-changing Cellular Robots Can Exceed Conventional Robot Flexibility[J].IEEE Robotics& Automation Magazine,2007,14(1):71-78.
[2]赵杰,唐术锋,朱延河,等.基于万向式关节的模块化自重构机器人[J].机器人,2010(5):608-613.Zhao Jie,Tang Shufeng,Zhu Yanhe,et al.A Modular Self-reconfigurable Robot Based on Universal Joint[J].Robot,2010(5):608-613.
[3]Yim M,Duff D G,Roufas K D.Walk on the Wild Side Modular Robot Motion[J].Robotics & Automation Magazine,2002,9(4):49-53.
[4]Kurokawa H,Tomita K,Kamimura A,et al.Distributed Self-reconfiguration of M-TRAN III Modular Robotic System[J].International Journal of Robotics Research,2008,27(3/4):373-386.
[5]任宗伟.基于晶体结晶理论的模块化自重构机器人重构策略的研究[D].哈尔滨:哈尔滨工业大学,2009.
[6]李志海,付宜利.基于遗传算法的仿生双足爬壁机器人越障运动规划[J].机器人,2012(6):751-757.Li Zhihai,Fu Yili.Motion Planning of a Bio-inspired Biped Wall Climbing Robot Stepping over Obstacles Based on Genetic Algorithm[J].Robot,2012(6):751-757.
[7]李满天,黄博,刘国才,等.模块化可重构履带式微小型机器人的研究[J].机器人,2006,28(5):548-552.Li Mantian,Huang Bo,Liu Guocai,et al.A Modular Reconfigurable Tracked Micro-robot[J].Robot,2006,28(5):548-552.
[8]Benjamin B H,Weghe J M V,Bererton C A,et al.Millibot Trains for Enhanced Mobility[J].IEEE/ASME Transactions on Mechatronics,2002,7(4):452-461.
[9]马金猛,李小凡,姚辰,等.地面移动机器人越障动力学建模与分析[J].机器人,2008,30(3):273-278.Ma Jinmeng,Li Xiaofan,Yao Chen,et al.Dynamic Modeling and Analysis for Obstacle Negotiation of Ground Mobile Robot[J].Robot,2008,30(3):273-278.
[10]Chen C X,Trivedi M M.Reactive Locomotion Control of Articulated-tracked Mobile Robots for Obstacle Negotiation[C]//Proceedings of the 1993IEEE/RSJ International Conference on Intelligent Robots and Systems.Yokohama,1993:1349-1356.
[11]邓宗全,高海波,王少纯,等.行星轮式月球车的越障能力分析[J].北京航空航天大学学报,2004,30(3):197-201.Deng Zongquan,Gao Haibo,Wang Shaochun,et al.Analysis of Climbing Obstacle Capability of Lunar Rover with Planetary Wheel[J].Journal of Beijing University of Aeronautics and Astronautics,2004,30(3):197-201.
[12]熊有伦.机器人学[M].北京:机械工业出版社,1993.
[13]唐术锋.基于万向式关节模块的自重构机器人研究[D].哈尔滨:哈尔滨工业大学,2010.
猜你喜欢
军民两用技术与产品(2022年1期)2022-06-01
哈尔滨工业大学学报(2022年5期)2022-04-19
导航定位学报(2022年2期)2022-04-11
摄影世界(2022年1期)2022-01-21
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
中国生殖健康(2020年7期)2020-12-10
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
商周刊(2017年6期)2017-08-22
北京航空航天大学学报(2017年10期)2017-04-20
