
基于底盘激励的汽车高速行驶方向盘抖动研究
2014-12-05 06:55胡朝辉何智成成艾国
中国机械工程 2014年19期
胡朝辉 邵 慧 何智成 成艾国
湖南大学汽车车身先进设计制造国家重点实验室,长沙,410082
0 引言
汽车转向系统的振动是驾驶员通过方向盘可以直接感知到的敏感振动,是影响整车NVH水平的重要因素,它也直接影响整车的操纵稳定性、行驶平顺性及行驶速度等。近年来方向盘的振动问题一直是国内外学者研究的热门课题,Kim等[1]通过研究轮胎的非均匀性、轮胎气压以及路面-轮胎的激励力,找到了方向盘振动的主要影响因素。Yu等[2-3]分析了制动扭矩波动和底盘振动传递灵敏度对方向盘振动的影响,并进行了频域与时域的验证,为分析方向盘振动提供了很好的方法。
汽车转向系统振动的主要表现形式为方向盘的摆振,方向盘的摆振可分为低速摆振与高速抖动。低速摆振主要是由汽车怠速状态或低速行驶时发动机的低频激励引起的;高速抖动是由汽车高速行驶时路面激励、车轮动不平衡等引起的[4]。驾驶员在怠速状态下对转向盘的摆振最为敏感,因此,以往对转向系统的振动分析侧重于汽车怠速或低速状态下方向盘摆振的仿真优化分析,通过优化方向盘的固有频率来改善方向盘的低速摆振,解决方向盘的低速摆振问题无论是从试验还是仿真优化分析上技术均已成熟[5-7]。
方向盘高速抖动问题及其影响因素早已被研究者提出,文献[8-9]从试验的角度对高速方向盘抖动问题进行了分析优化,试验过程比较复杂,消耗时间多,增加了整车开发成本。本文提出了一种试验与仿真相结合的研究汽车高速行驶时方向盘抖动的分析方法,并将其应用到国内某乘用车高速行驶时方向盘的抖动问题分析上,实例证明了该方法的工程实用性。建立了高速状态下具有一定精度的转向系统有限元模型,以试验测得的转向节处的加速度频谱为激励,对方向盘高速抖动问题进行了仿真,并从激励源和传递函数两个方面进行了分析。最后从普遍适用的传递函数方面对方向盘高速抖动问题提出改进方案并进行了验证。
1 方向盘高速抖动分析方法
采用传统的分析方法只能解决汽车怠速或低速状态下方向盘振动过大的问题。本文提出了一种解决汽车高速状态下方向盘抖动过大问题的有效分析方法,该方法结合试验与仿真,主要步骤如下。
(1)建立精确的转向系统有限元模型。该模型包括方向盘、转向管柱、转向传动轴、IP梁、下摆臂、转向横拉杆、转向节和各种安装支架及加强结构等。
(2)验证所建模型的精确性。将模型的仿真模态与其试验模态进行对比,若固有频率相对误差在5%之内且振型相同,则认为所建模型的精度是满意的;否则,返回步骤(1),对模型进行修正检查直到对比结果满意为止。
(3)试验测试汽车高速行驶时转向轮左右转向节处的振动加速度频谱。
(4)将测试得到的振动加速度频谱曲线作为激励输入模型的转向节处,计算汽车高速状态下方向盘的频率响应函数。
(5)根据计算的结果曲线,理论上可以从激励源和传递函数[10]两个方面进行优化,通过激励频率来寻找引起振动过大的最主要的激励源头,然后设法控制此激励源,但激励源一般无法避免;传递函数只跟系统本身有关,要想减小传递函数值就要改善转向系统结构,通过优化钣金件的厚度或其结构来达到优化目的,优化方案最终通过试验验证。具体分析流程如图1所示。
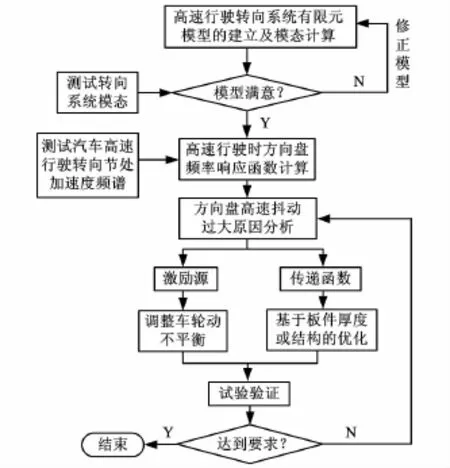
图1 基于底盘激励的方向盘高速抖动分析流程
2 高速行驶转向系统分析模型
仿真分析中,建立有效且准确的有限元模型是后续分析的关键。传统的分析模型如图2a所示,其部件较少,模型简单;图2b所示即为本文提出的研究方向盘高速抖动的转向系统模型结构,该模型相对复杂。两种模型的主要区别如下:①本文模型更全面,从方向盘到转向节之间的主要部件均有建模;②本文模型细节处理更符合实际,转向传动轴、转向节等实体部件均用实体网格模拟,主要的缓冲部件(如衬套等)用弹簧模拟;③计算方式不同,方向盘高速抖动分析由激励输入得到响应输出,而传统分析仅计算分析方向盘的固有频率。
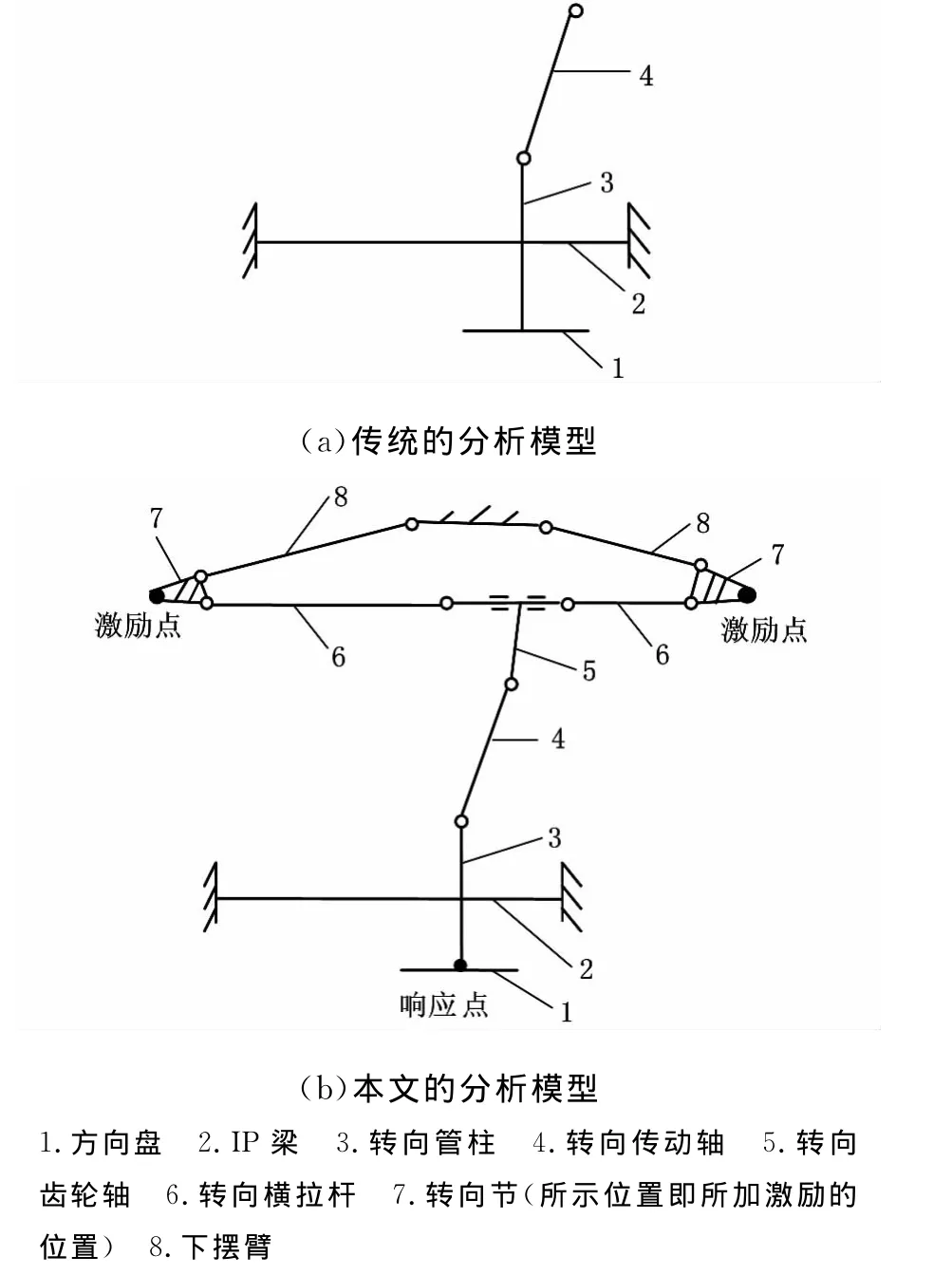
图2 方向盘高速抖动-转向系统结构示意图
3 方向盘高速抖动优化数学模型
从以上分析流程看出,可以从激励源和传递函数两个方面来解决方向盘高速抖动问题。汽车高速行驶过程中,激励主要由车轮动不平衡引起。车轮动不平衡一方面由平衡质量块引起,可以通过调节平衡块质量来改善;另一方面由车轮高速旋转引起的轮胎变形引起,这是无法避免的。调节车轮平衡质量块一般通过试验完成,不需要仿真分析。若从改善传递函数角度考虑,则需要通过仿真来优化主要钣金件的厚度或结构,最后通过试验验证。
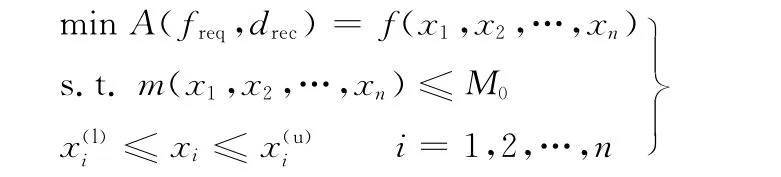
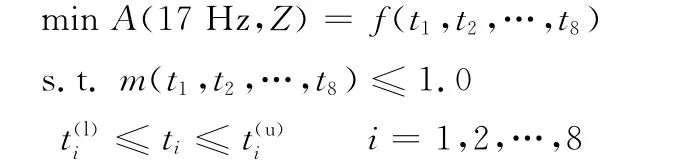
解决方向盘高速抖动问题的实质就是减小方向盘的振动加速度。本文以汽车高速行驶时方向盘振动加速度为目标函数,设为A();以转向系统的质量为约束函数,设为m();以各零件的厚度为设计变量。其数学模型如下:

4 应用实例
国内某乘用车在90~120km/h的速度下直线行驶时,其方向盘均有抖动现象,当车速为110km/h时,方向盘抖动最为严重。本文以方向盘抖动最为严重的110km/h典型车速为分析优化对象,全面分析并解决该车方向盘高速抖动问题。
4.1 高速状态下转向系统有限元模型的建立
根据图2b中的模型结构,建立国内某乘用车的高速状态转向系统的有限元模型[11],如图3所示。
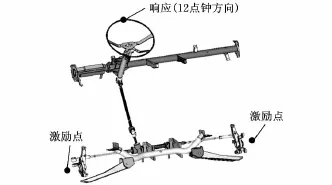
图3 某乘用车高速转向系统有限元模型
本模型包含节点65 453个、单元185 349个,其中包括14 585个壳单元、170 230个四面体单元,其余是Rbe2和弹簧单元。转向万向节用Cbar单元模拟;球铰链等连接均用Rbe2模拟,根据实际情况放开相应自由度;主要部位的橡胶衬套用弹簧模拟。模型中所涉及的方向盘、转向节等实心部件均用四面体单元模拟;IP梁等板壳件用以四边形为主的混合单元模拟;模型中与车身相连的部位均已约束6个方向的自由度。
4.2 模型验证
4.2.1模态仿真
计算出该转向系统的模态,结果如图4和图5所示。
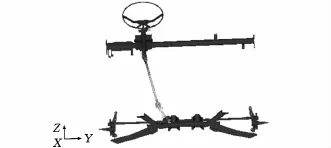
图4 转向系统一阶模态(转向传动轴,17.33Hz)
4.2.2模态测试
利用锤击法测试转向系统的模态[12],转向系统一阶模态和二阶模态的测试结果如图6和图7所示。

图5 转向系统二阶模态(方向盘,28.66Hz)
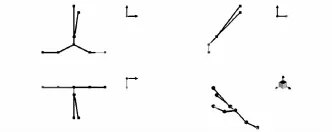
图6 转向系统一阶模态(转向传动轴,17.97Hz)
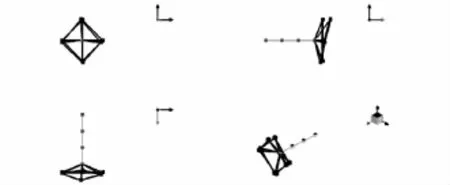
图7 转向系统二阶模态(方向盘,27.75Hz)
该转向系统的模态试验结果与仿真结果对比见表1,可以看出,一阶模态与二阶模态的试验结果与仿真结果相对误差均在可接受的范围(5%)之内,对应的振型也均相同,保证了所建转向系统模型的精度,为后续研究奠定了可靠的基础。
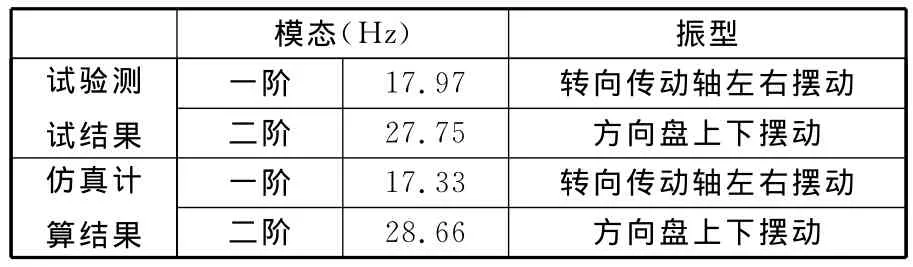
表1 模态试验结果与仿真结果对比
4.3 转向节处加速度频谱测试
为了进一步分析,需要测试该汽车高速行驶状态下左右转向节处的振动加速度频谱。选择测试转向节处的加速度频谱,一方面是因为方便测试,另一方面则是因为转向节接近底盘可以感受来自底盘等方面的激励。另外,转向节位于转向系统的末端,可以把受到的激励较全面地通过转向传动机构反馈到方向盘,更加接近实际情况。
将所测试的转向节处的加速度频谱作为仿真分析中的输入激励,其测试精度直接影响模型仿真精度。为了保证测试结果精度,利用国外较权威的LMS test.lab NVH测试软件并设置频率分辨率为1Hz进行测试;测试中,布点位置准确即测点位置与仿真模型中激励点位置基本保持一致,加速度传感器所贴位置如图8所示;另外,测试路面是平直的沥青路面,避免了不良路面激励的干扰。

图8 转向节振动加速度频谱测点
测得该汽车在转速v=110km/h的高速行驶状态下左右转向节处加速度频谱如图9所示。
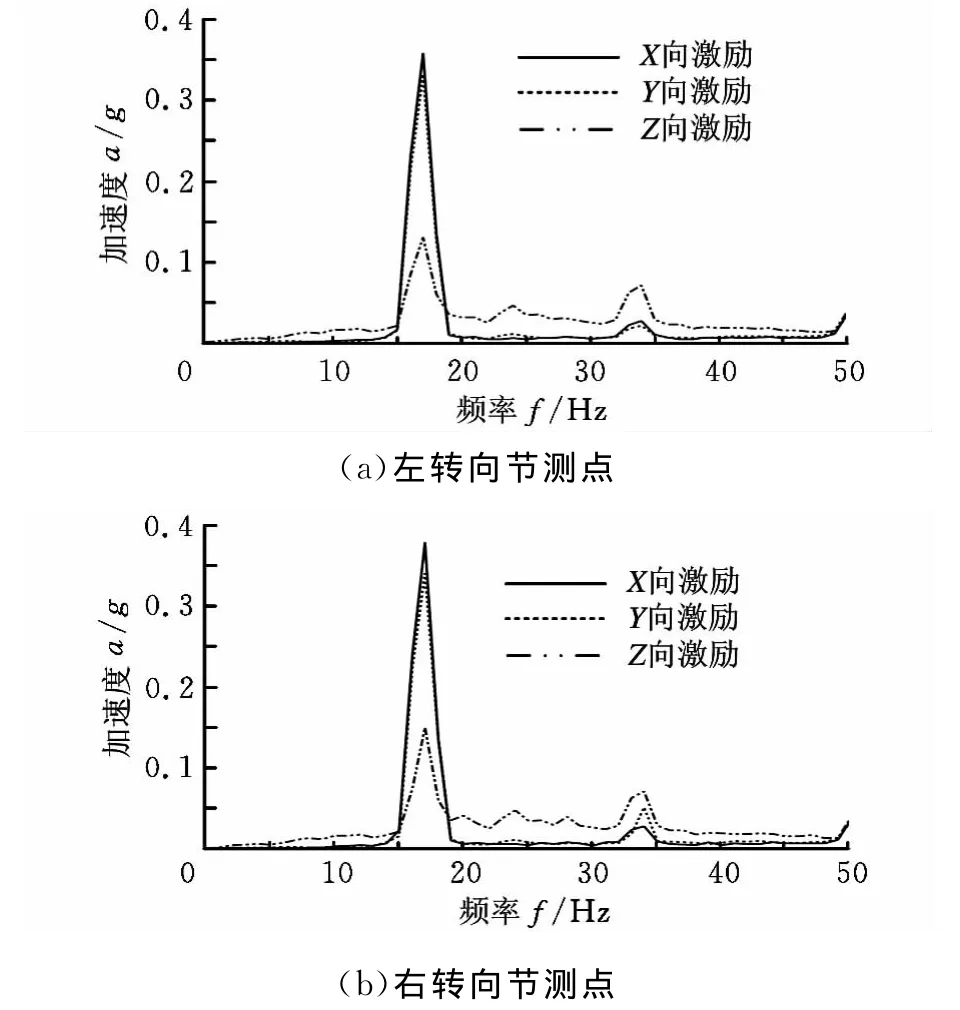
图9 转向节测点加速度频谱(v=110km/h)
4.4 方向盘高速抖动仿真分析
该车高速行驶时,驾驶员在驾驶过程中可以明显感觉到方向盘抖动,用试验的方法寻找抖动原因较麻烦,并且会增加成本。在上文建立的有限元模型的左右转向节处输入来自底盘等方面的激励(v=110km/h时的加速度频谱),以方向盘12点钟方向处为响应输出点进行频率响应分析,分析结果如图10所示。
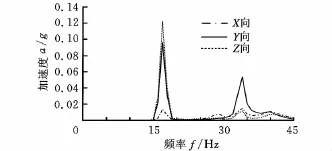
图10 方向盘12点钟方向频率响应函数(v=110km/h)
由图10可以看出,当该车以110km/h的高速行驶时,其方向盘在17Hz附近的振动加速度最大,为0.12g。由上文模态分析结果可知,17Hz并不是方向盘本身的模态,而是转向系统中转向传动轴的一阶模态。因此,只通过优化方向盘固有频率的传统方法不能解决这个问题。
振动响应由激励源、传递函数或由两者共同引起,若由激励源引起,就需要寻找激励源;若由传递函数引起,就需要改变系统结构[9]。从图9可看出,左右转向节测点在17Hz附近,激励均出现峰值,说明激励源可能是引起方向盘振动较大的一个因素。为了判断传递函数是否为引起方向盘抖动较大的一个原因,在有限元模型左右转向节处加单位激励,计算方向盘12点钟方向处的传递函数值,结果如图11所示。
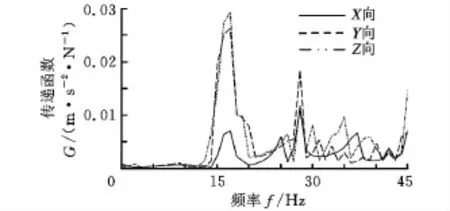
图11 方向盘传递函数(v=110km/h)
从图11可看出,传递函数也在17Hz附近出现峰值,说明方向盘的振动幅值是由激励源和传递函数共同引起的。转向节处所测得的激励源包括发动机激励、路面激励和车轮不平引起的激励等,理论上可以通过调整车轮动不平衡来改善激励源,但车轮因高速旋转变形也会导致车轮不平,所以调整车轮平衡质量块的质量不一定会有效果,这个方案在本文中不做讨论。本文将通过优化各零件的厚度来改善传递函数,从而达到减小方向盘振动加速度的目的。
4.5 基于厚度的方向盘高速抖动优化
4.5.1变量设计
本文的设计变量为主要板件的厚度ti,主要设计板件的有限元模型示意见图12。在有限元模型中这些板件既有壳单元又有实体单元。实体单元的厚度优化处理起来比较困难,为解决这个问题,本文在实体部件的表面重新建立壳单元,保证壳单元的节点与实体表面的节点重合,通过优化此壳单元的厚度可间接优化转向传动轴的厚度,如图13所示。图13中,外部为壳单元,内部为实体单元,通过优化壳单元的厚度即可实现优化转向传动轴的厚度。各板件厚度原始厚度、设计上下限见表2。

图12 设计板件示意图
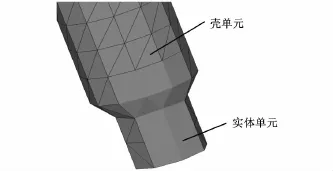
图13 转向传动轴
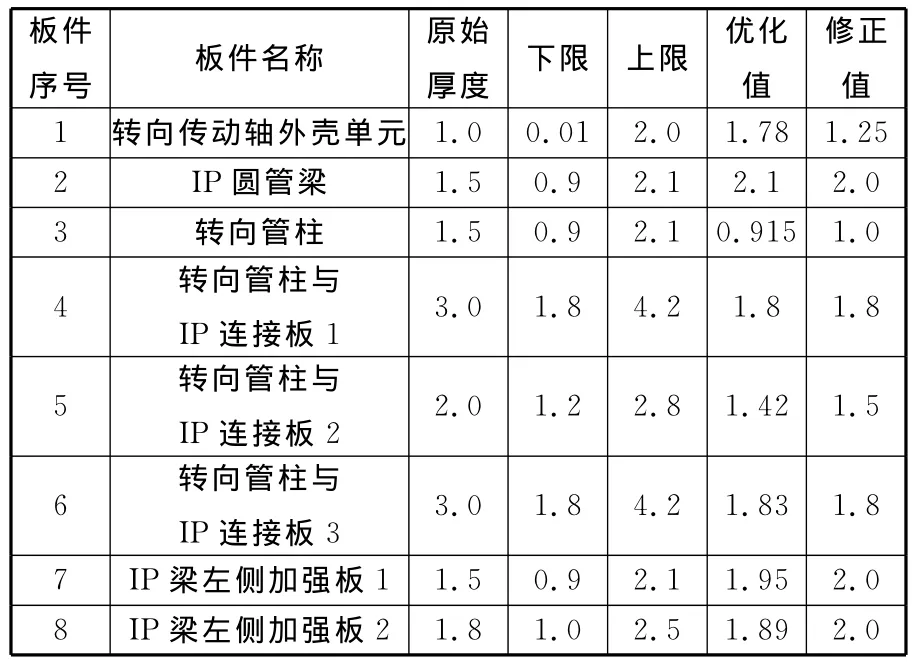
表2 变量设计及优化结果 mm
4.5.2目标约束
从图10可以看出,方向盘17Hz处Z向的振动加速度最大,因此,以方向盘12点钟方向Z向17Hz处所对应的振动加速度最小为目标函数,以优化后总质量不增加为约束函数。具体数学表达式如下:
4.5.3优化结果及验证
优化结果如表2所示。做特殊处理的转向传动轴部件(壳单元)的优化值为1.78mm,该实体的原始直径为17.5mm,根据优化结果及工程实际将其调整为20.0mm,其他部件均按表2做出修正。修正后,将加速度传感器贴在图14所示的位置测试方向盘的振动加速度,测点位置与仿真模型中响应点的位置保持一致。该汽车以110 km/h的车速行驶时,该方向盘的Z向频率响应函数的仿真结果和测试结果分别如图15和图16所示。

图14 方向盘高速抖动测试示意图
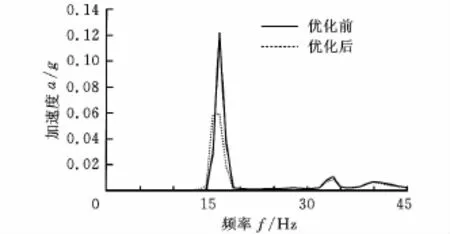
图15 优化前后方向盘Z向频率响应函数仿真结果(v=110km/h)
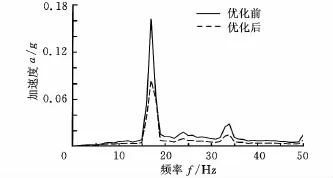
图16 优化前后方向盘Z向频率响应函数试验结果(v=110km/h)
从仿真及试验结果可看出,改变主要板件厚度后,当车速为110km/h时,Z向振动加速度均有大幅度减小,其中仿真值减小幅度约为52%,测试值减小幅度约为49%。为了证明优化结果的适用性,另外选择方向盘开始抖动的车速(即90km/h)进行验证,如图17所示,可以看出其Z向振动加速度也明显减小。事实上,在测试验证过程中,驾驶员已感觉不到方向盘抖动,该车高速行驶过程中,方向盘抖动问题得到成功解决。
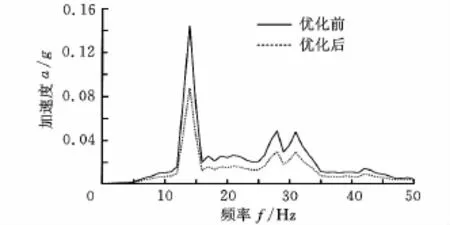
图17 优化前后方向盘Z向频率响应函数试验结果(v=90km/h)
5 结论
(1)本文提出了一种研究汽车高速行驶时方向盘抖动的分析方法,建立了研究方向盘高速抖动的转向系统模型。以国内某乘用汽车转向系统为例,通过其试验模态与仿真模态对比来保证该模型的精度。
(2)以试验测试高速行驶的汽车的左右转向节处的加速度频谱为激励,仿真分析方向盘的高速抖动问题。通过对主要板件的厚度优化,提出解决方案,在优化过程中,利用在实体单元表面建立壳单元的方法间接实现对实体单元厚度的优化。最后利用试验验证了优化方案的工程适用性,成功解决了实例中某乘用汽车的方向盘高速抖动问题。
利用本文方法仿真分析方向盘高速抖动问题,可以通过仿真来找出关键因素,避免了重复试验所存在的盲目性,可以高效准确地指导转向系统的设计。但本文中悬架、车轮定位参数等均未考虑,后续的研究将进一步完善。
[1]Kim K W,Park J B,Lee S J.Tire Mass Imbalance,Rolling Phase Difference,Non-uniformity Induced Force Difference,and Inflation Pressure Change Effects on Steering Wheel Vibration[J].SAE Paper,2005-01-2317.
[2]Yu Jinghong,Nutwell B,Brickner B.Analysis of Vehicle Chassis Transmissibility of Steering Shimmy and Brake Judder:System Modeling and Validation[J].SAE Paper,2007-01-2341.
[3]Yu Jinghong,Brickner B,Nutwell B,et al.Analysis of Vehicle Chassis Transmissibility of Steering Shimmy and Brake Judder:Mechanism Study and Virtual Design of Experiment[J].SAE Paper,2007-01-2342.
[4]张永利,许翔,吴云.高速行驶时汽车方向盘摆振的控制[J].噪声与振动控制,2011(2):56-58.Zhang Yongli,Xu Xiang,Wu Yun.Control on Steering Wheel Shimmy of the Car at High Speed[J].Noise and Vibration Control,2011(2):56-58.
[5]Kim K C,Kim C M.Analysis Process of a Steering System Using a Concept Model for Idle Vibration[J].International Journal of Automotive Technology,2008(9):337-346.
[6]谯万成,张铭成,刘旌扬.基于模态分析的汽车转向盘怠速抖动优化[J].汽车技术,2011(11):27-30.Qiao Wancheng,Zhang Mingcheng,Liu Jingyang.Optimization on Shake of Steering Wheel when vehicle at Idle-speed Based on Modal Analysis[J].Automotive Technology,2011(11):27-30.
[7]周萍,于德介,臧献国,等.采用响应面的汽车转向系统固有频率优化[J].汽车工程,2010,32(10):883-887.Zhou Ping,Yu Dejie,Zang Xianguo,et al.Optimization of the Natural Frequency of Vehicle Steering System Using Response Surface Method[J].Automotive Engineering,2010,32(10):883-887.
[8]谭万军,杨亮,吴行让,等.基于ODS与试验模态分析的方向盘摆振优化[J].振动工程学报,2011,24(5):498-504.Tan Wanjun,Yang Liang,Wu Xingrang,et al.Steering Wheel Shimmy Optimization Based on ODS Analysis and Experimental Modal Analysis[J].Journal of Vibration Engineering,2011,24(5):498-504.
[9]周宁,李磊,戴声良.汽车高速方向盘摆振问题整改[J].汽车工程师,2011(11):49-51.Zhou Ning,Li Lei,Dai Shengliang.Research of Steering Wheel Swaying in High Speed[J].Automotive Engineer,2011(11):49-51.
[10]蔡共宣,林富生.工程测试与信号处理[M].武汉:华中科技大学出版社,2006.
[11]Deytshel B W,Kanmivk R B.Improving Vehicle Response to Engine and Road Excitation Using Interactive Graphics and Modal Reanalysis Methods[J].SAE1990,900817.
[12]沃德·海伦,斯蒂芬·拉门兹,波尔·萨斯.模态分析理论与试验[M].北京:北京理工大学出版社,2001.
猜你喜欢
农业工程学报(2022年13期)2022-10-09
灌溉排水学报(2022年6期)2022-07-13
汽车实用技术(2022年10期)2022-06-09
环境技术(2022年1期)2022-03-21
水泥工程(2020年4期)2020-12-18
汽车文摘(2017年4期)2017-12-07
制造技术与机床(2017年12期)2017-02-02
汽车维护与修理(2015年5期)2015-02-28
汽车维护与修理(2015年1期)2015-02-28
噪声与振动控制(2015年4期)2015-01-01
