异步电机矢量控制系统模糊PI控制器设计
2014-10-27 05:53张晓旭
通信电源技术 2014年4期
郭 燚,张晓旭,李 硕
(上海海事大学物流工程学院,上海 201306)
0 引言
随着电动机的应用越来越广泛,异步电机的控制成为一个非常有意义的研究课题。目前,感应电动机调速一般采用变频调速系统,而脉宽调制(PWM)变频器是变频调速系统的一个重要组成部分[1-2]。在PWM技术中,SVPWM相比于SPWM方式,具有谐波抑制效果好、响应快速、电压利用率高、电流波形畸变小、转矩脉动低等优点,已经在电机驱动方面得到了广泛应用。
异步电机数学模型较为复杂,精确的数学模型难以建立,且时间常数较大。传统的PID调整有超调,响应有延迟,性能指标也不能令人满意。模糊控制作为一种智能控制方法,无需知道控制对象准确的数学模型,而按照人类的知识、经验去构造控制规则。用模糊逻辑控制器来代替电机矢量控制中的PI转速调节器,选择8个基本的电压矢量,可得到更优化的开关表,以实现对转矩和转速的实时控制,从而改善异步电机矢量控制系统的动态和稳态特性。
1 异步电机SVPWM控制策略
1.1 异步电机矢量控制
异步电机的矢量控制就是根据异步电机的坐标变换理论,在三相坐标系下,将定子输入的电流变换到两相旋转坐标系M,T轴中。并且使得M轴沿转子总磁链矢量的方向,最终获得等效成同步旋转坐标系下的直流电流ism、ist,从而可以把异步电机等效成输入电流为im1、it1的直流电机,进而获得与直流电动机一样良好的动态调速特性。矢量控制系统原理图如图1所示。

图1 异步电动机矢量变换和等效直流电动机模型
经过坐标变换,可得电压方程[3]:

电机转子磁链与电流关系:

将式(2)代入到式(1)第3行中,得到:

再代入式(2),得:

式中,Tr为转子励磁时间常数,Tr=Lr/R2。T轴上的定子电流it1和转子电流it2的动态关系满足式(3),或写成[3]:

由式(1)和式(2)可得:

将式(6)代入式(7),并考虑到Tr=Lr/R2,可得到转差频率控制方程式为:
2.4 患者临床症状体征 见表3。本研究中钩虫性十二指肠炎综合征患者临床表现多样,其中腹痛表现共76例,为主要常见临床表现。

电机的电磁转矩为:

式中:R1,R2为定转子电阻;Lm为定转子等效绕组间的互感,Lm=(3/2)Lsm。
从推导过程可知,将定子磁链分解为励磁分量ism和转矩分量ist,实现了对异步电动机中磁链和转矩的分别控制。从式(2)可以看出,磁链和励磁电流是一个具有一阶惯性的传递函数,这和直流电机的励磁特点十分类似。
1.2 电压空间矢量SVPWM技术
矢量控制系统为了实现对逆变器的控制,可采用多种脉宽调制技术,如SPWM和SVPWM。相较于传统电压SPWM来说,SVPWM将逆变电路和电机看做一个整体,模型简单且易于数字化实现。此外,该控制技术能明显减小电流波形畸变和电机谐波损耗,降低电机转矩脉动,提高直流电压利用率,被广泛应用于电机调速领域[4-8]。
SVPWM的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量进行合成,使其平均值与给定电压矢量相等[4]。图2所示为变频器输出电压空间矢量图。从图2可见,三相功率器件共有8个开关状态:S0=(0,0,0),S1=(1,0,0),S2=(1,1,0),S3=(0,1,0),S4=(0,1,1),S5=(0,0,1),S6=(1,0,1),S7=(1,1,1),同一相上下桥臂的开关状态互补。“1”表示相对应相上桥臂开关导通,“0”表示相对应的相下桥臂开关导通[9]。例如,“(1,0,0)”表示A相上桥臂开关导通,B、C两相下桥臂开关导通,而其余的开关都处于关断状态。

图2 电压空间基本矢量图
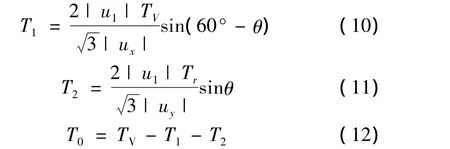
在每个开关周期内,开关状态的顺序为:S0(T0/4)→SA(T1/2)→SB(T2/2)→S7(T0/2)→SB(T2/2)→SA(T1/2)→S0(T0/4),其中 SA和 SB为变频器参考电压矢量→ui所在扇区两侧的两个相邻开关状态。如果ux和uy分别是SA和SB所对应的电压矢量,ux和uy在每个开关周期内的各开关状态对应的工作时间T1、T2为[10-11]:
2 模糊PI控制器设计
在传统矢量控制系统中使用PI控制,其结构简单、稳定性好。但是由于异步电机数学模型复杂,参数和结构的不确定性,导致系统无法适应系统的参数变化和外部扰动。模糊控制则不依赖被控对象精确的数学模型,可改善电机的动态性能。
2.1 模糊控制原理
模糊逻辑控制由A.Zadeh于1965年提出[5]。它不需要建立控制对象的精确的数学模型,只要求把现场工作人员的经验和数据总结成较完善的语言控制规则,因此它能绕过对象的不确定性、不精确性、噪声以及非线性、时变性等的影响。它的知识模型是由一组模糊推理产生的规则(主要由模糊控制规则和表示对象特性的语言规则)构成的,它的人机对话能力强,能够方便的将专家的经验与思考加入到模型中。一般,一个模糊推理系统就是指一个模糊控制器。
模糊控制器由模糊器、推理机和解模糊器组成,框图如图3所示。
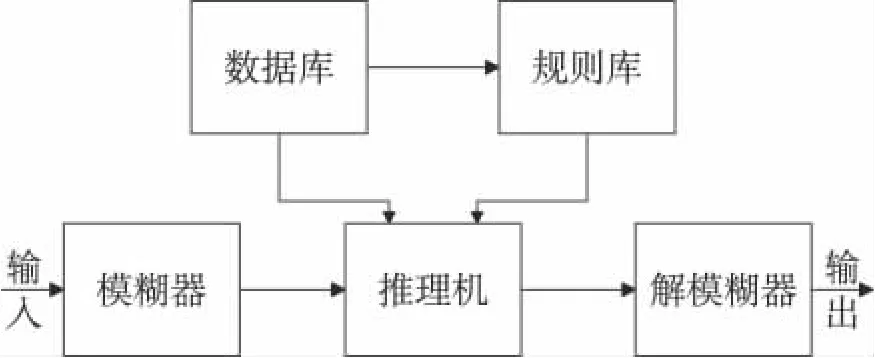
图3 模糊控制器的组成框图
图3中,模糊器:将真实输入的精确量转换为模糊量。推理机:模糊控制器的核心,它具有模拟人的基于模糊概念的推理能力。该推理过程是基于模糊逻辑中的蕴含关系及推理规则来进行的,常用的有Mamdani极小运算法和拉森乘积运算法等。解模糊器:将模糊推理得到的控制量(模糊量)变换为实际用于控制的清晰量。
2.2 模糊PI控制器设计
模糊控制器在矢量控制系统中作为速度调节器,输入变量为电机的速度误差e和速度误差变化率ec,输出控制变量为u,分别对应模糊控制器中的模糊变量 E,EC和 U[6]。根据 PI参数 KP和 KI与 E 和 EC之间的模糊关系,以ΔKP,ΔKI作为输出量,从而调整这2个参数以满足不同的E和EC对PI控制参数的不同要求,从而使系统具有良好的动、静态性能。异步电机的模糊矢量控制框图如图4所示。

图4 异步电机模糊控制框图
E,EC的模糊集合可表示为:{NB,NM,NS,Z,PS,PM,PB}或{负大,负中,负小,零,正小,正中,正大},理论域值为(-3,3)。确定模糊变量的隶属度函数后,就可以对模糊变量赋值。
在模糊PI控制器参数自整定的过程中,对于不同的|e|和|ec|,比例增益KP和积分增益KI应满足以下要求[7]:
(1)当|e|较大时,为了能加快系统的响应速度,应取较大的KP;同时为了防止系统响应出现较大的超调,应对积分作用加以限制,通常取较小的KI。
(2)当|e|和|ec|处于中等大小时,应分2种情况:若e和ec同号,被控量朝着偏离给定值的方向变化,为了使系统响应具有较小的超调,KP应取得大一些,KI则应取得适当大;若e和ec异号,被控量朝着接近给定值的方向变化,此时应逐渐减小KP和KI。
(3)当|e|较小时,为了使系统有良好的稳态性能,应适当弱化比例作用,加强积分作用甚至将KI设为最大值,以防止e的微小变化致使系统震荡。
(4)|ec|越大,KI越大,反之亦然。
在综合上述专家知识的基础上,采用三角形的隶属度函数[8],进行大量仿真实验调试后,得到调整量ΔKP,ΔKI的控制规则如下表1所示。
3 仿真与分析
在异步电机控制系统的仿真模型上,对异步电机的模糊PI的控制算法进行了仿真测试。在Matlab/Simulink中,异步电机选用的鼠笼电机模型,电机仿真参数:额定功率PN=2.2 kW,额定电压UN=220 V,频率 f=50 Hz,定子电阻 Rs=0.8 Ω,转子电阻 Rr=0.816 Ω,定子自感Ls=71 mH,转子自感Lr=71 mH,定、转子互感Lm=69 mH,极对数np=2,转动惯量J=0.18 k g·m2。
在Matlab/Simulink中,系统仿真模型如图5所示。仿真条件:给定额定转速(1500 r/min),电机空载启动,0.2 s后给定50%的额定负载(5 N·m)。仿真结果如图6、图7、图8所示。
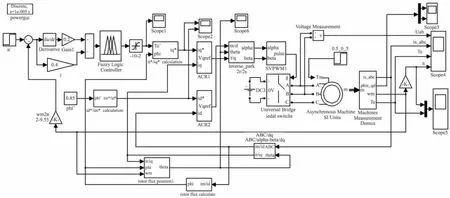
图5 采用模糊PI控制器的电机控制系统仿真模型

图6 电机转速波形
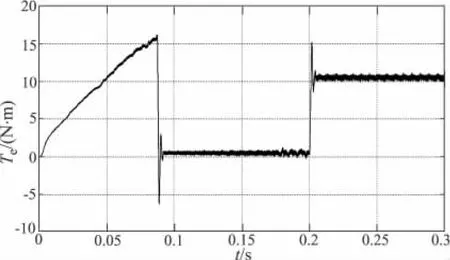
图7 电机电磁转矩波形
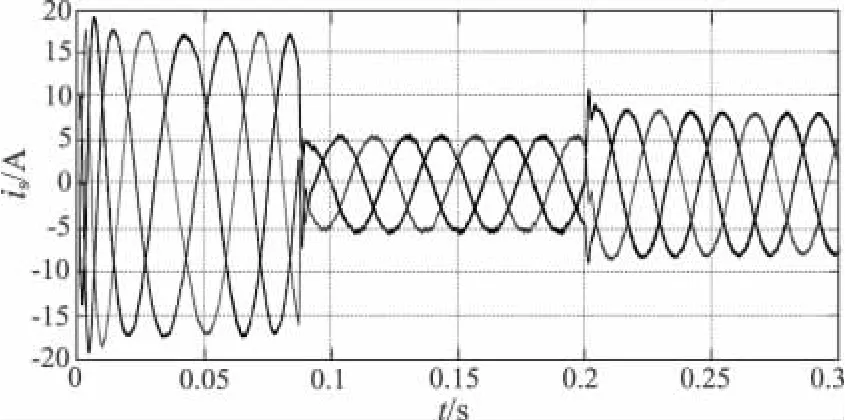
图8 电机定子电流波形
分析图6~图8可知,给定1500 r/min,空载启动电机时,0.088 s后电机达到稳态,启动电流为17.5 A,在限定范围内。启动最大转矩为17.5 N·m,启动转矩为额定转矩的1.75倍,在系统要求的范围内。在0.2 s时突加50%的额定负载,则加载0.025 s以后,电机即进入稳定运行状态(转速恒定、转矩稳定)。在突加负载过程中,转矩波动仅8%。系统在突加阶跃负载环境下的过渡过程,控制系统能保持转速恒定,响应快速,抑制电磁转矩脉动。同时电机转速保持恒定为1500 r/min,鲁棒性能好。
4 结论
本文研究基于模糊控制的异步电机矢量控制系统,在矢量控制系统的速度闭环中采用模糊控制。仿真研究表明,采用模糊控制的矢量控制系统具有良好的稳态性能,可以很好地抑制转速超调。该方法在突变负载情况下,速度基本保持稳定不变,系统鲁棒性大大增强,说明该控制方法的正确性和可行性。但是电机矢量控制系统中磁链闭环没有应用模糊控制,有待于进一步研究,同时对于仿真的启动过程也可以再深入研究。
[1]Chau K T,Chan C C.Emerging energy - efficient technologies for hybrid electric vehicles[J].Proceedings of the IEEE,2007,95(4):821-835.
[2]张春喜,廖文建,王佳子.异步电机SVPWM矢量控制仿真分析[J].电机与控制学报,2008,2(12):160-163.
[3]杨 勇.基于模糊自整定的改进型永磁同步电机矢量控制仿真研究[J].机电工程技术,2010,39(8):47-49.
[4]陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2005.
[5]孙文焕.基于FPGA的全数字化交流变频调速系统[D].武汉:华中科技大学,2000.
[6]杨 明,张 扬,曹何金生,等.交流伺服系统控制器参数自整定及优化[J].电机与控制学报,2010,14(12):29-33.
[7]刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2011.
[8]洪 跃,刘宝运,金士良,等.模糊控制在液体粘性离合器中的应用[J].机械设计与研究,2008,24(1):58-67.
[9]王 研,杜军红,陶伟宜,等.基于DSP的空间电压矢量法PWM 的研究[J].电机与控制学报,2000,4(2):98-101.
[10]满春涛,张凯博,金祯伊.SVPWM变频空调永磁同步压缩机控制系统[J].哈尔滨理工大学学报,2011,16(04):82-85.
[11]张永昌,赵争鸣.基于自适应观测器的异步电机无速度传感器模糊矢量控制[J].电工技术学报,2010,25(3):40-47.
[12]BOWES SR,LIU YS.The relation between space-vector modulation and regular sampled PWM [J].IEEE Trans on IE,2007,44(5):670-679.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
成都信息工程大学学报(2021年6期)2021-02-12
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
电子制作(2019年16期)2019-09-27
现代防御技术(2016年1期)2016-06-01
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
新高考·高一物理(2016年1期)2016-03-05