DSP在三相交流异步电动机调速系统中的应用
2014-10-27 05:53季文彪王步来
通信电源技术 2014年4期
季文彪,王步来,高 鹏,高 响
(上海海事大学电气工程学院,上海 201306)
0 引言
交流异步电机的调速方法一般包括调压调频法、转差频率控制、矢量控制和直接转矩控制技术。矢量控制和直接转矩控制是高性能变频调速领域的主流方法[1]。随着工业生产对调速性能要求的提高,尤其一些需要实时速度跟踪和速度跟踪精度要求高的场合,多采用矢量控制调速。
TMS320F2812是TI公司专门为了控制电机而研发出的信号处理器(DSP)。它在速度计算和电压电流采样方面都有相应的模块[2]。文献[3]介绍了以DSP为核心的控制系统的开发,基于矢量控制理论,实时检测电机的定子电流,用光电编码器检测并计算出电流,通过DSP的各个模块检测出数据并反馈到DSP中来。在实时调试中还可以对程序特定参数进行修改,以观察系统的稳定性和快速响应特性,同时可以测量电机的电压、电流、频率、速度等参数[3]。本文以DSP控制的220 V/50 Hz/1.5 kW三相交流异步伺服电机为例,介绍其控制系统的实现。
1 控制系统的硬件设计
基于F2812DSP的矢量控制通过算法把励磁和转矩解耦控制,其核心是磁链检测[4],整个硬件框图如图1。硬件电路大致分成图中所示几个模块,下面简述关键的两个电机实时量的检测。

图1 控制系统硬件框架
1.1 电流检测
霍尔电流检测模块使用ACS721芯片,检测电机的两相电流,把检测出的数值通过硬件调理电路控制到0~3 V,之后输入到DSP的ADC的相应管脚,这里DSP程序控制字设置AD0和AD1作为数据的输入口。电流检测电路如图2。
1.2 转速检测
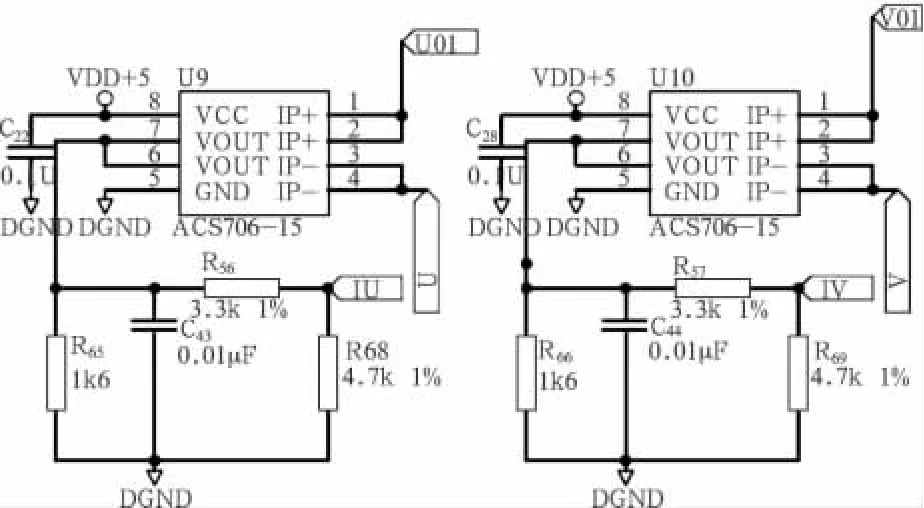
图2 电流检测
转速检测使用增量式光电编码器,本实验室采用的是光洋电子TRD-2T/2TH系列编码器,该编码器转一圈产生1024个脉冲,通过检测脉冲的上升沿下降沿计算转速,光电编码器得到的脉冲波形通过DS3486M正交线性接受器调理波形,最后输出和转速、转向以及原点位置及相对角位移相关的数字信号A+,B+,Z+。转速检测部分硬件电路如图3。
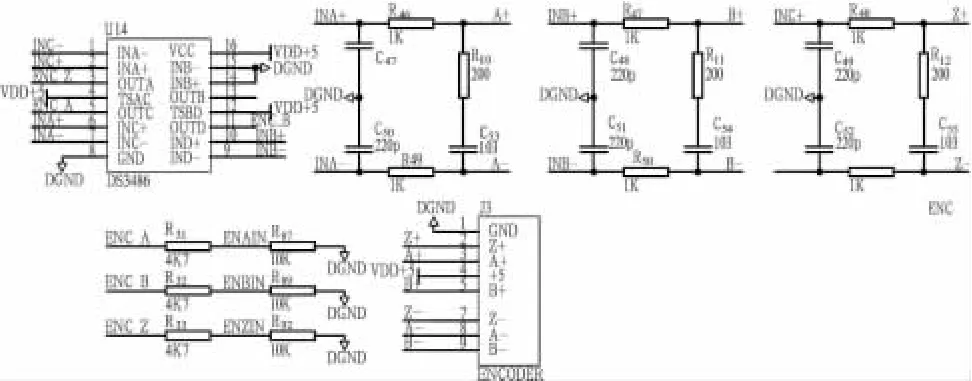
图3 转速检测
2 矢量控制系统的软件实现
图4给出了矢量系统编程的设计框图,根据该模块的形式进行模块化编程。

图4 软件框图
以下重点讨论电机转速计算和电流采样的程序设计。
2.1 电流采样程序设计
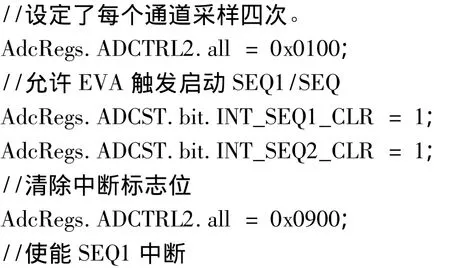
TMS320F2812的ADC包含控制寄存器,最大转换通道寄存器、序列状态寄存器、状态标志寄存器、通道选择序列控制寄存器以及结果寄存器和结果缓冲寄存器。该型号DSP有16个采样通道,具有12位的ADC内核,通过各个相关控制寄存器的设置可以设定采样方式,在程序的开始应先对其中一些寄存器进行初始化[5]。ADC的部分初始化程序如下:

2.2 转速计算程序设计
转速测量一般有M法、T法和M/T法。虽然M/T法最复杂,但它在进行转速测量时可以充分利用片上丰富的资源,再加上DSP强大的数据处理能力,使得M/T法测速的精度无论在低速和高速状态下都很高。该测速方法用到捕获功能模块、正交编码接口模块。图5为测速流程图。

图5 软件流程
测速采用两个计数器工作,T2为QEP输入的4倍脉冲计数,T1为EVA高速计数时钟。M1通过T1得到,M2通过T2得到,配合抓捕功能,精确得到在两个捕获时间段里的脉冲数,最后求得转速。下面给出部分转速初始化程序和计算程序。


3 实验结果
本系统所用实验平台的控制电机参数:额定功率1.5 kW,额定电流 6.4 A,额定电压 220 V,额定频率50 Hz,极对数np=2,通过改变给定速度和改变负载转矩看到转速的跟踪变化和稳定。图6、图7、图8是实验中得到的SVPWM算法T1、T2波形,一相电流波形和此时的转速。
由图7可知,一相电流是正弦波,在给定功率为0.56 kW情况下的同步转速是840 RPM,图8是加转矩后的速度,在慢慢减小负载转矩后,转速在实际过程中渐渐接近840RPM。实验证明了控制系统的有效性。
4 结束语

图6 SVPWM波形

图7 一相电流波形

图8 电机转速
本文通过CCS3.3模块化编程把控制要求输入DSP中。DSP仿真板、功率驱动板、异步电机共同组成了电机的控制系统。该控制系统结构简单,因为采用模块化编程,控制算法只要稍加修改,便可以用于其他的控制算法研究,具有一定的通用性。
[1]魏 新,陈大跃,赵春宇.交流电机调速实验系统的PC端监控程序设计[J].计算机工程,2006,32(8):247.
[2]冬 雷.DSP原理及电机控制系统应用[M].北京:北京航空航天大学出版社,2007.
[3]王晓明,王 玲.电动机的DSP控制以及TI公司DSP应用[M].北京:北京航空航天大学出版社,2004.
[4]刘 燕,邵晓强.异步电机矢量控制系统转子磁链间接检测方法[J].微电机,2001,34(2):27-29.
[5]谢青红.TMS 320 F28x DSP原理及其在运动控制系统的应用[M].北京:电子工业出版社,2009.
猜你喜欢
电工技术学报(2022年20期)2022-10-29
网络安全与数据管理(2022年1期)2022-08-29
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
微电机(2022年1期)2022-03-21
有色金属设计(2022年4期)2022-02-04
计算机应用(2020年5期)2020-06-07
电子技术与软件工程(2018年1期)2018-03-22
制造技术与机床(2017年7期)2018-01-19
探测与控制学报(2015年4期)2015-12-15
中国光学(2015年5期)2015-12-09