基于IPMC仿生机器鱼推进效率实验研究
2014-10-19 01:19:42韩晨皓王田苗梁健宏
北京航空航天大学学报 2014年12期
沈 奇 韩晨皓 王田苗 梁健宏
(北京航空航天大学 机械工程及自动化学院,北京100191)
水下无人航行器在各个领域都被广泛地使用.受自然界生物启发,全世界的科学家和工程师设计了一系列的仿生水下机器人.智能材料的发展和应用同样对水下仿生机器人的发展起到了重要的作用[1-4].在水下仿生机器人的推进模式的选择上,离子聚合物金属复合材料(IPMC,Ionic Polymer-Metal Composite)是一种很有前景的材料[5-6].它由离子聚合膜和作为电极镀在在两侧的金或者铂金属组成.如果在它们的厚度方向上施加一个电场,它就会弯曲,反之亦然.另外,如果给它施加一个外力,同样可以得到一个可观测的电压值.它具有低触发电压(1~2V)、低能耗和高柔性的特点.因此通过使用IPMC能够得到一种低噪声、微型、柔性的仿生机器人.
许多基于IPMC的水下仿生机器人已经被设计和制作.Yim等人提出了IPMC驱动器的动力学模型框架,通过这个模型可以对单片IPMC或者多片IPMC组成的水下驱动器进行建模,但是他们只对这个模型进行了仿真,并没有通过实际实验来证实[7].Chen等人提出了一个IPMC推进仿生机器鱼的模型,对IPMC机器鱼的平均游动速度进行了建模,并设计实验验证模型[8-10].Mbemmo等人提出了一种用来预测IPMC水下仿生机器鱼运动的模型框架[11],同时利用了数值计算和数字粒子图像测速(DPIV,Digital Particle Image Velocimetry)对IPMC的流体动力学进行了分析[12-13].但是这只是局限于单片固定的IPMC,缺乏对IPMC在一个整体的水下机器人系统中的分析.在微型机器人方面,因为其体积有限,所携带的能量也有限,因此游动效率是一个十分重要的参数.迄今为止,很少有对IPMC仿生机器鱼的推进效率开展研究.
本文设计实验对机器鱼推进效率开展研究.通过机器鱼在水中自由游动来测定机器鱼的推进速度.使用了一种新型的基于伺服拖拽系统的同步测量方法得到机器鱼在水中推力和自推进速度.通过使用这种方法,机器鱼能通过自身产生的推力进而以相应的速度游动,而不再受外部装置的限制.本文将围绕机器鱼的推力、能耗及稳定时的游动速度开展实验研究,并最终得到机器鱼推进效率.其中,通过测试IPMC鱼尾在空气中和水下不同的环境中相同振幅下的能耗,获得了机器鱼在水下的能量输出.本文将为IPMC效率测试的进一步研究奠定实验基础.
1 IPMC机器鱼样机
本节将介绍IPMC机器鱼样机设计.图1展示了机器鱼样机结构,其包括了3个部分:①组成鱼身的刚体外壳;②作为“肌肉”的IPMC;③尾端的塑料模拟鱼尾.
整个身体的外形使用SolidWorks设计,同时使用尼龙材料通过3D打印机制作,使用黑色树脂进行表面处理来达到光滑的效果,整个外形结构设计接近椭圆型.它的外形结构根据黄花鱼(石首鱼)的身体比例设计,以便于使其满足流线型和减阻性的需求.IPMC通过作为夹紧装置的小型矩形导电铜盘连接到鱼的身体上.鱼尾连接到IPMC的尾部来增加其在水中的推力.电池单元(两节3.7 V串接)和电子设备装在鱼外壳内.受电机控制系统设计的启发,本IPMC控制的设计使用了L289N的H-桥结构,以满足足够大的电流及方便的I/O控制.配重被安置在了鱼的底部使机械鱼处于悬浮状态,同时增加了其在滚转、俯仰方向的稳定性.对机器鱼的实验研究包括了水下的自由游动和伺服拖动系统下的推进.整条机器鱼的长度(除去尾部)为144mm,高为52.5 mm,最宽部分为37.5 mm.整个机器鱼的质量接近180g.本文采用两条不同尺寸的IPMC进行实验测试,其尺寸如表1所示.
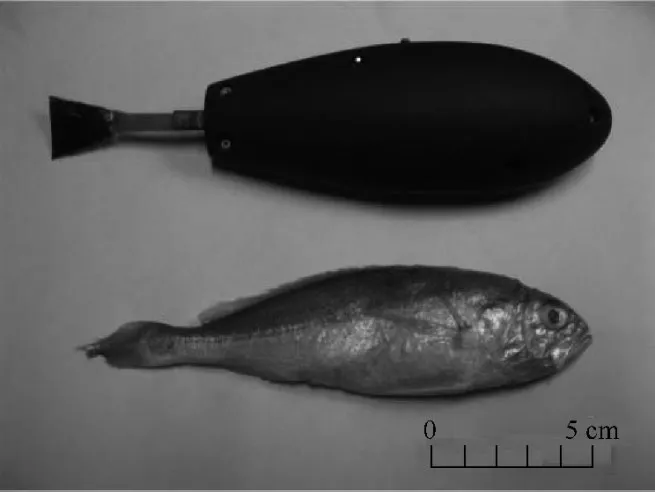
图1 仿生机器鱼样机Fig.1 Prototype of biomimetic robotic fish

表1 IPMC的三维参数Table 1 Dimensional parameters of the IPMC
2 推进效率实验测试
本节测试了IPMC机器鱼的推进效率.推进效率 ηexp的表达式为[14]

通过测量推进力Texp,速度Uexp和能量损耗来得到推进效率的实验结果.在2.1节中通过拖动系统和水缸进行了一系列的实验.在2.2~2.4节中将分别介绍Uexp,Texp,的测量原理和测量结果.2.5节将给出推进效率的最终结果.
2.1 实验装置
实验设计了伺服拖动系统,进行流体动力实验来确定推进效率.整个伺服拖动系统由4 kW的交流电机驱动,同时被用于测量水下机器人自主推进的流体动力参数[15-16].整个装置的拖拽速度范围从0.005~1 m/s,速度误差为0.2%.
图2中展示了一个自推进实验装置的机械结构,机器鱼及其附属组件被垂直连接到力传感器下,同时力传感器由螺丝固定在推进实验装置上.机械鱼整体没入了水下,连接机器鱼和力传感器的杆在水面之上.采用一个测量范围为1 N,灵敏度为0.01 N的传感器测量轴向推力T(见图2).同时在连接处设置了一个低阻轴承.根据杠杆原理,力传感器上的力数值将会使作用在鱼身上的合力放大100倍.鱼的质心G被设置在杆下,以便减少重力在实验过程中的影响.
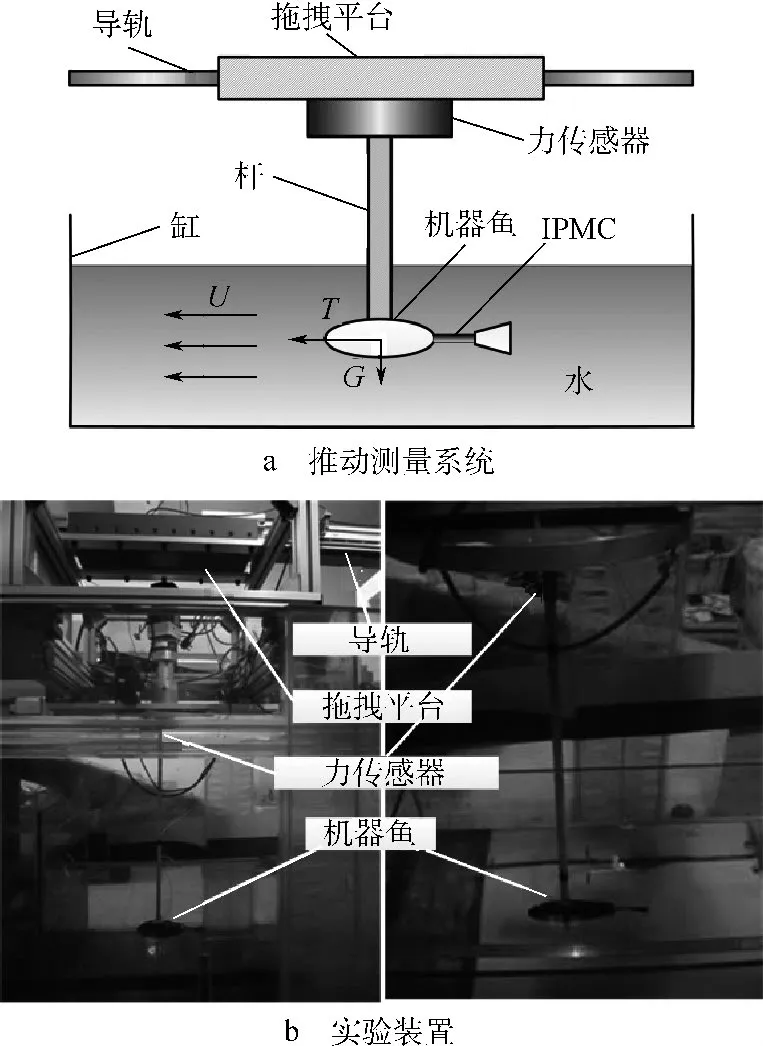
图2 机器鱼自推进测量系统及实验装置Fig.2 Experimental setup of the self-propulsion measurement system
控制单元和机器鱼的电源被安装在了一个沿着拖动方向(前进方向)运行的实验装置上.水槽尺寸为7.8 m×1.2 m×1.1 m,提供给了机器鱼一个足够大、移动不受边界影响的空间.机器鱼的位置处于水槽的中等深度以避免任何来自表面和水槽底部的干扰.目前本实验只考虑到了机器鱼游动的前进方向,对其横向移动以及滚转进行了限制.这个简化的实验方法(例如:增加了横向约束和滚转约束)被广泛地使用在单独考虑直线游动的鱼类游动流体动力实验研究上[17].实验中使用Nicolet Vision XP来记录实验数据.
2.2 游动速度的测量
机器鱼的速度是推进效率中一个重要的参数,本节将通过实验对其进行测量.在本实验中,机器鱼在水槽中由IPMC推进自由游动,并利用一个计时器测量并记录鱼在稳定游动状态下游过一个给定距离(10cm)的时间.同时在振幅Av=3.3V的情况下以不同频率的正弦电压驱动来对比不同情况下的机器鱼游动速度.如图3所示,机器鱼在水槽中游动.在每一个驱动频率下,对机器鱼的速度重复测量5次,最终得到了巡游速度Uexp的平均值.
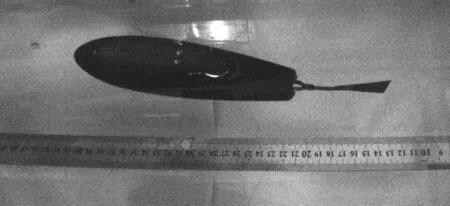
图3 IPMC机器鱼在水中游动Fig.3 Snapshot of IPMC robotic fish swimming in the tank
图4显示了IPMC机器鱼在水中自由游动的实验数据.对于每一个IPMC鱼尾,都有一个相应的最佳驱动频率(接近于1.4 Hz),使其能够达到最高的游动速度.实验表明,当激励频率变得相对较高或较低时,IPMC机器鱼的速度就会下降.

图4 IPMC机器鱼速度实验数据Fig.4 Experimental results of IPMC robotic fish speed
2.3 推进力的测量
本小节通过流体力学实验研究了IPMC机器鱼的推动力和阻力.当机器鱼游动时,推进力和阻力是以合力体现的,因此推力不能直接被测量,所以设计拖拽系统来测量IPMC产生的推进力.传统机器鱼样机的流体动力学实验模型的理论中,在前进方向上Text≠0,也就是说推进力并不等于阻力.因此,多余的力被外部的部件所吸收.也就是说,机器鱼并不是自驱动的,而是在一个外部约束的情况下被迫地移动,同时推进力和阻力也不相等.考虑到主动和被动的拖拽方法,本文提出了一个全新的、结合了各自特点的自推进实验方法.
图4中测量并得到了在不同的尾部结构下,机器鱼在伺服拖动系统下的拖动速度.在每一个速度Uexp下,IPMC对应相应的正弦电压输入.在2.2节测量自由游动速度Uexp过程中也许会有一些误差(例如:鱼并不是直线游动,同时人为的时间测量误差也存在).在拖拽实验时通过调整拖拽的速度,以确保外部力T=0.根据牛顿定律,当阻力FD等于推进力 Texp时,也即当检测力 T=(FD-Texp)×100=0时,可以认为没有了上端的部件作用在其上的外部附加力,即机器鱼是自推进状态下游动.在实验过程中IPMC机器鱼在自推进状态的游动范围是70 cm.期间进行了超过100组的实验对其进行了测试.
接下来对推进力Texp进行测量.当机器鱼以速度Uexp游动时,可以通过测量阻力FD来得到推进力Texp.为了得到阻力FD,将IPMC的输入电压设置为零值.在系统下以速度Uexp拖拽机器鱼,就可以测得阻力FD.在此实验中,对于每一个游动速度Uexp,分别对其进行了3次阻力实验测量,以保证实验结果的重复性和准确性.整个过程进行了超过70次的实验.
图5中展示了不同尺寸的IPMC鱼尾的机器鱼推进力实验结果比较.当频率接近1.4 Hz时,IPMC尾部产生的推进力达到了最大值,此结果与图4中展示的IPMC机器鱼游动速度的结果相对应.本实验同样展示了可以通过增加执行机构的长度和末端的最大位移来提高推进力.图6显示了IPMC机器鱼在不同速度下的推力.总体上,当机器鱼速度较大时,所输出的推力也较大.
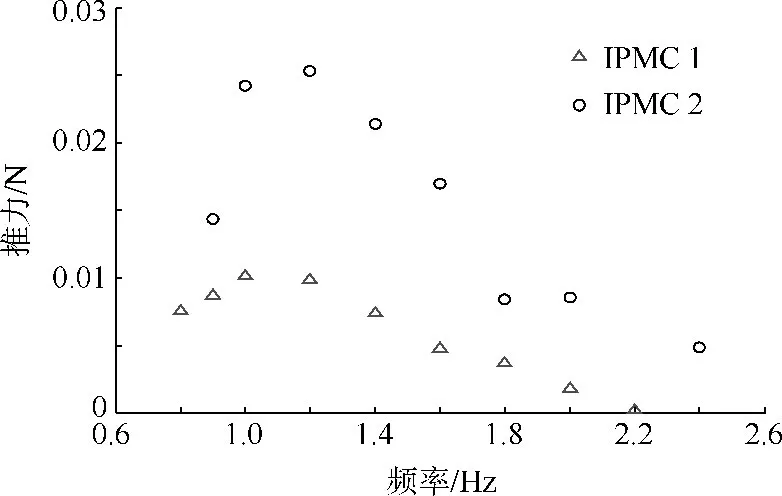
图5 IPMC机器鱼在不同频率下的实验推进力Fig.5 Experimental results of thrust produced by the IPMC robotic fish at various frequencies
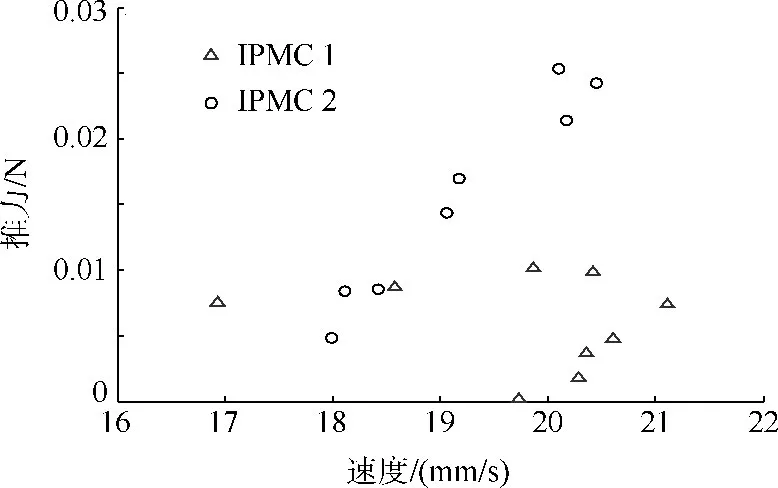
图6 IPMC机器鱼在不同速度下的推力Fig.6 Thrust of IPMC robotic fish vs speed
2.4 能耗测量
为了得到机器鱼在流体中游动状态下的能量输出,需要测量在不同情况下IPMC尾部的能耗.首先,IPMC尾部根据2.2节中电压的输入在水下进行摆动.通过激光感应器测量末端位移Dflu.利用示波器对Dflu成像.图7中给出了能耗测量装置的示意图,在实验过程中记录同步电压输入和电流输出以及Dflu.之后,IPMC尾部在相同的电压输入下在空气中摆动.基于示波器上的显示,通过控制放大器上的电压输入,将IPMC在空气中的位移调整到与Dflu一致,同时测量了IPMC在水下和空气中的振动过程中电压 Uflu,Uair和电流Iflu,Iair.在一个周期内频率f下IPMC机器鱼尾输出的平均能量可以通过以下方程得到:

其中ts代表了在IPMC工作时的任意时间点.最终,得到了机器鱼推进过程中在水中消耗的能量.类似能耗测量方法已在其他机器鱼推进效率实验中得到了实践[10-11].
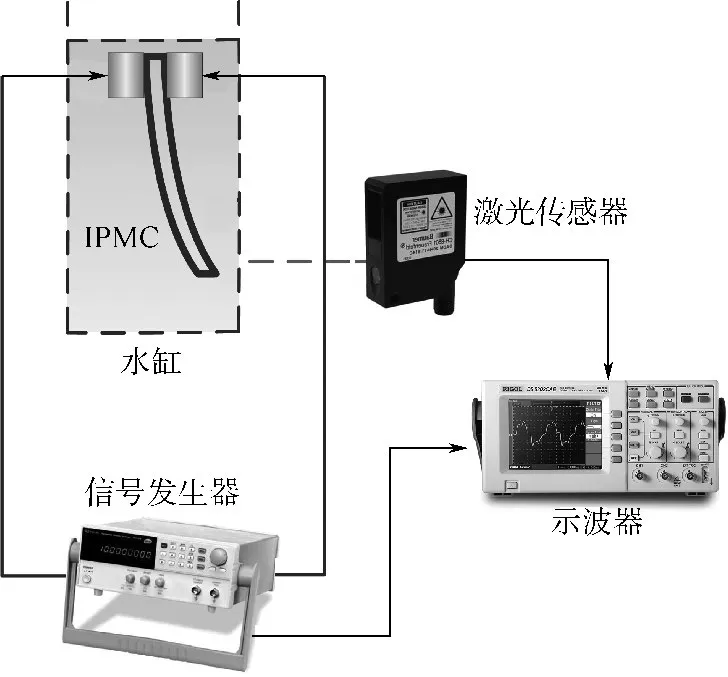
图7 能耗测量装置简图Fig.7 Schematic view of power consumption measurement apparatus
实验发现,在同样的电压输入下,IPMC在空气中的形变要比水中运行时大.图8给出了在频率为1 Hz、等振幅下空气中和水下IPMC尾部能耗、电压电流输出的比较.并对不同的频率下IPMC的尾部输出能量进行测量.图9给出了流体中两个IPMC尾部的能量输出.发现随着频率的增加,IPMC尾部的能耗输出显著地增大.考虑到当频率相对增加时IPMC机器鱼的推进力和速度下降的现象(图4、图5),可以认为当频率相对较低时存在一个推进效率的最佳值.在实验中,同样可以观察到IPMC尾部的振幅随着频率的增加而降低.

图8 在1Hz下不同IPMC尾部能耗、电压和电流的比较Fig.8 Comparison of experimental IPMC tail power consumptions,applied voltages and current outputs with equivalent vibrating amplitude at frequency of 1 Hz
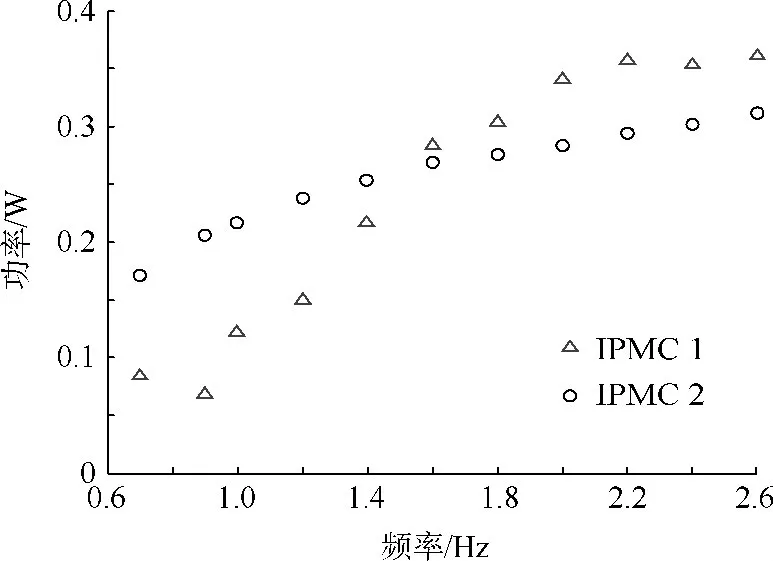
图9 流体中不同IPMC尾部的能量输出Fig.9 Power output of different IPMC tails in fluid
2.5 推进效率
由之前的实验得到了IPMC机器鱼的推进效率实验结果.基于对Texp,Uexp,的测量以及式(1),便能获得IPMC机器鱼推进效率的实验数据ηexp.
图10中展示了推进效率的实验数据结果ηexp.可以发现,当频率最初增加时效率就会增加,当频率相对较高时效率反而会下降.当频率接近1 Hz时推进效率达到了最大值.同时不同的尾部会有不同的推进效率.
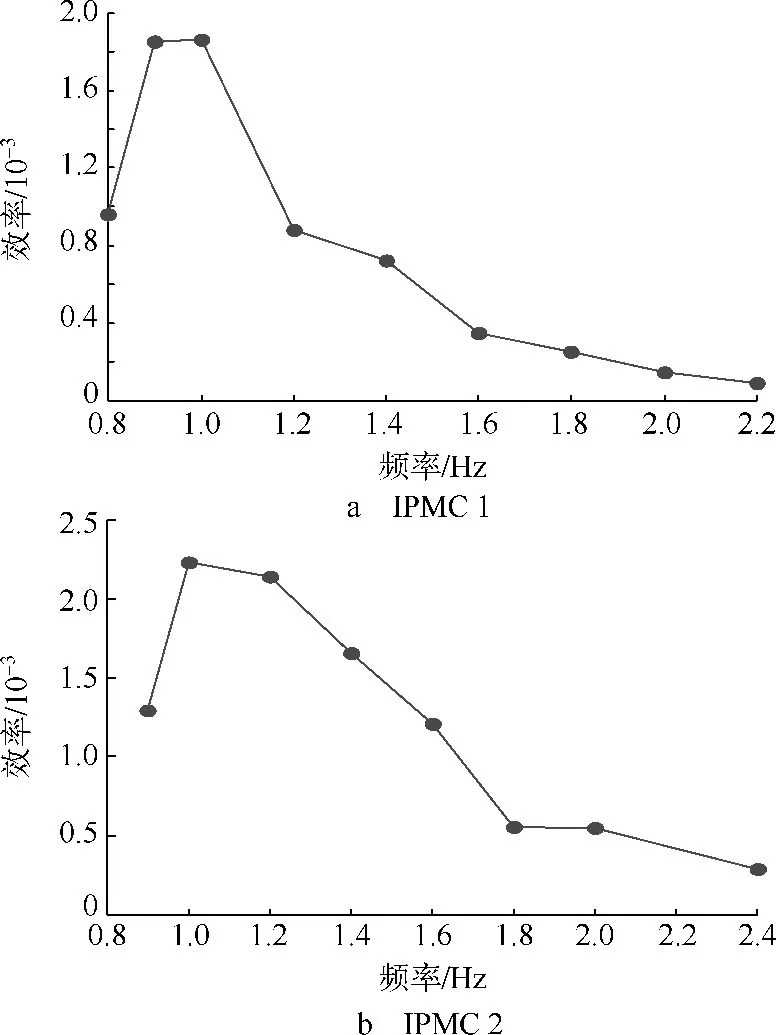
图10 IPMC机器鱼推进效率的实验结果Fig.10 Experimental results of IPMC robotic fish thrust efficiency
图11中给出了一个三维图像,展示了在不同的IPMC激励频率下的推进效率和速度的对比.当激励频率接近1Hz时,机器鱼可以达到较高的效率,同时也得到了相对较高的速度.可以认为当它的驱动频率接近效率的最优点时,IPMC机器鱼在推进速度和推进效率上都可以达到一个很好的效果.

图11 不同驱动频率下机器鱼推进效率和速度的三维图Fig.11 3D plot of thrust efficiencies and velocities of IPMC robotic fish in various actuation frequencies
表2显示了不同仿生机器鱼的推进效率对比.之前在该实验装置下开展了对仿生机器鱼推进效率的实验研究[12],基于“自主推进”条件的实验测量方法,通过光机电一体化技术同步测量了机器鱼的功耗、外力以及流场结果,并定量估算了机器鱼的推进效率.测量结果表明,机器鱼的推进效率与前人的3D-CFD数值计算取得较为一致的结果[13].与本文实验结果进行对比,可以发现IPMC仿生机器鱼推进效率较低,通过对比图6和图9,相对于IPMC输出推力,其消耗功率较大,这由IPMC本身特性所决定.同时,IPMC机器鱼在水中游动时,其正负电极两端的电势差也会导致水发生电解反应,这也是造成IPMC机器鱼功率消耗较高的原因.

表2 不同仿生机器鱼推进效率对比Table 2 Thrust efficiencies of different robotic fish
3 结论
本文提出了一种新型的实验方法用来研究IPMC机器鱼推进效率.主要结论如下:
1)提出了一种全新的机器鱼游动效率测量方法,通过测量作用在机器鱼身上的力来确定拖拽速度,在自推进的条件下能够精确测量机器鱼的推进效率.
2)机器鱼的效率随着驱动频率的变化,先增大后减小,当IPMC驱动频率接近1 Hz时,IPMC机器鱼的游动效率达到峰值2.3×10-3.
3)当IPMC驱动频率接近1 Hz,机器鱼速度达到最大值,结合上面结论,游动效率的最优驱动频率接近于游动速度的最优驱动频率.
接下来的工作将着重研究柔性鱼鳍对IPMC推进机器鱼游动特性的影响,同时未来将关注刚性鱼鳍等方面.未来的工作同样也会包括IPMC机器鱼高效率控制策略的研究,同时建立推进效率模型以适应不同雷诺数的环境,以便于在各个尺度下研究机器鱼的推进特性.
References)
[1] Zhou C L,Low K H.Design and locomotion control of a biomimetic underwater vehicle with fin propulsion[J].IEEE/ASME Transactions on Mechatronics,2012,17(1):25-35
[2] Shen Q,Wang T M,Liang J H,et al.Hydrodynamic performance of a biomimetic robotic swimmer actuated by ionic polymer-metal composite[J].Smart Materials and Structures,2013,22(7):075035
[3] Wang T M,Shen Q,Wen L,et al.On the thrust performance of an ionic polymer-metal composite actuated robotic fish:modeling and experimental investigation[J].Science China Technological Sciences,2012,55(12):3359-3369
[4] Shen Q,Wang T M,Wen L,et al.Modelling and fuzzy control of an efficient swimming ionic polymer-metal composite actuated robot[J].International Journal of Advanced Robotic Systems,2013,10:350
[5] Shahinpoor M,Kim K J.Ionic polymer-metal composites:I.Fundamentals[J].Smart Materials and Structures,2001,10(4):819-833
[6] Shahinpoor M,Kim K J.Ionic polymer-metal composites:IV.Industrial and medical applications[J].Smart Materials and Structures,2005,14(1):197-214
[7] Yim W,Lee J,Kim K J.An artificial muscle actuator for biomimetic underwater propulsors[J].Bioinspiration & Biomimetics,2007,2(2):S31
[8] Chen Z,Tan X B.A control-oriented and physics-based model for ionic polymer-metalcompositeactuators[J].IEEE/ASME Transactions on Mechatronics,2008,13(5):519-529
[9] Chen Z,Shatara S,Tan X B.Modeling of biomimetic robotic fish propelled by an ionic polymer-metal composite caudal fin[J].IEEE/ASME Transactions on Mechatronics,2010,15(3):448-459
[10] Mbemmo E,Chen Z,Shatara S,et al.Modeling of biomimetic robotic fish propelled by an ionic polymer-metal composite actuator[C]//2008 IEEE International Conference on Robotics and Automation(ICRA).Piscataway,NJ:IEEE,2008:689-694
[11] Abdelnour K,Mancia E,Peterson S D,et al.Hydrodynamics of underwater propulsors based on ionic polymer-metal composites:a numerical study[J].Smart Materials and Structures,2009,18(8):085006
[12] Peterson S D,Porfiri M,Rovardi A.A particle image velocimetry study of vibrating ionic polymer metal composites in aqueous environments[J].IEEE/ASME Transactions on Mechatronics,2009,14(4):474-483
[13] Aureli M,Kopman V,Porfiri M.Free-locomotion of underwater vehicles actuated by ionic polymer metal composites[J].IEEE/ASME Transactions on Mechatronics,2010,15(4):603-614
[14] Anderson J M.Vorticity control for efficient propulsion[D].Cambridge:Massachusetts Inst of Tech,1996
[15] Wen L,Wang T M,Liang J H,et al.A novel method for simultaneous measurement of internal and external hydrodynamic force of self-propelled robotic fish[C]//2010 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS).Piscataway,NJ:IEEE Computer Society,2010:952-957
[16] Wen L,Wang T M,Wu G H,et al.Quantitative thrust efficiency of a self-propulsive robotic fish:experimental method and hydrodynamic investigation[J].IEEE/ASME Transactions on Mechatronics,2013,18(3):1027-1038
[17] Borazjani I,Sotiropoulos F.Numerical investigation of the hydrodynamics of carangiform swimming in the transitional and inertial flow regimes[J].Journal of Experimental Biology,2008,211(10):1541-1558
猜你喜欢
少儿画王(3-6岁)(2023年4期)2023-06-28 11:01:55
舰船科学技术(2022年20期)2022-11-28 08:20:28
机械设计与制造(2021年8期)2021-08-26 10:55:56
中国临床医学影像杂志(2021年6期)2021-08-14 02:22:00
哈尔滨轴承(2021年1期)2021-07-21 05:43:16
小学科学(2020年11期)2020-03-04 11:39:00
东方法学(2017年4期)2017-07-13 16:45:07
中国塑料(2015年4期)2015-10-14 01:09:32
天津诗人(2014年4期)2014-11-14 19:05:52
少儿科学周刊·儿童版(2013年4期)2013-07-19 07:46:02