融合模糊与PID算法的自主巡逻车协调转向控制
2014-09-22 09:13:20,,
电气传动 2014年9期
,,
(中国民航大学机器人研究所,天津 300300)
1 引言
车辆转向控制的研究主要涉及车辆跟随、车辆换道等内容[1]。无人车转向控制即根据车载传感器获取车体运行状态信息以及道路信息产生控制指令,自动实现车体转向。但由于车辆和道路的参数变化,以及转向运动系统固有的非线性特性,使得转向控制器的设计是一个复杂问题。
目前对于无人车转向控制问题的研究受到国内外许多科研机构的重视。文献[2]针对车辆的非线性结构和参数不确定性等特性,采用模糊-滑模变结构方法设计了纵向控制器;文献[3-4]采用自适应滑模变结构控制算法设计了车的转向控制器,并通过仿真试验验证了该方法的有效性。文献[5]根据换道轨迹确定期望的横摆角和横摆角速度,利用检测到的车辆横摆角速度信息,设计控制规律,使车辆跟踪期望横摆角和横摆角速度,间接实现对换道轨迹的跟踪控制。文献[6]采用滑模变结构控制方法设计了耦合控制器,控制器要求系统参数的不确定性和外界扰动满足匹配条件,但车辆系统是非匹配不确定性非线性系统。文献[7]以车辆纵向速度、转向速度和摆角速度为状态变量建立车辆转向耦合动力学模型,采用滑模控制、动态表面控制方法研究车辆跟随和车道保持耦合控制。文献[8]是利用直接的横摆力矩控制,导致车辆横摆角速度稳态值降低。
众多学者对车体转向控制研究,基本采用PID控制,并以理论仿真进行分析,在实际应用中需要不断改进控制算法进一步提高控制效果。本文在分析自主巡逻车车体转向动力学模型的基础上,推导出方向盘转角与速度之间的约束关系。结合车体行进时不同阶段的控制要求,综合车体转向相关各参数变化特点,选择应用模糊控制以及PID控制算法,协调控制车体的车速、方向盘转角和方向盘转速,实现自主巡逻车协调转向控制。
2 自主巡逻车转向模型分析
2.1 自主巡逻车转向动力学模型
自主巡逻车系统存在严重的参数不确定性、强耦合性。根据对车体动力学模型的分析,综合考虑各个子系统之间的相互联系,作以下简化:研究内容仅考虑车辆的纵向、转向及横摆运动,忽略车辆的侧倾、垂直方向运动以及左右轮胎侧偏特性的差异,车体左右对称。假设车轮始终与地面接触,忽略轮胎刚度和阻尼特性,其非线性特性由轮胎模型描述。最后,不考虑转向系统力学特性,方向盘转角与前轮转角只存在传动比关系,左右轮转角相同。车体动力模型简化如图1所示。
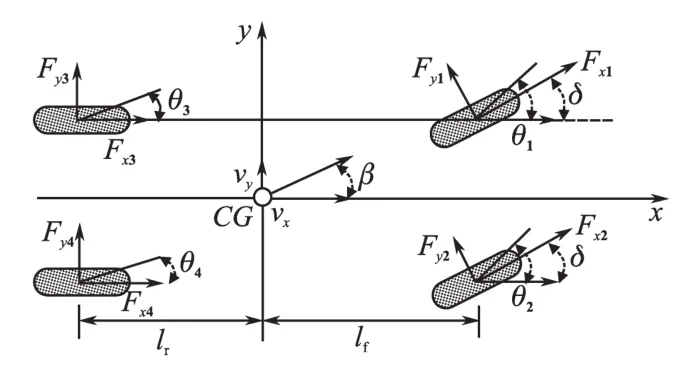
图1 自主巡逻车动力学模型Fig.1 Kinetics model of autonomous patrol car
模型中CG为车辆质心,β为质心侧偏角,即车辆行驶速度和纵轴夹角,vx为车体纵向速度;vy为横向速度;γ为横摆角速度;模型的动力学关系可描述为

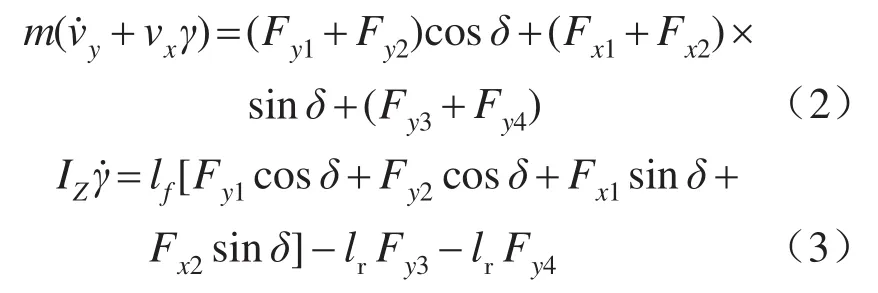
式中:m为整车质量;IZ为车辆绕Z轴的转动惯量;Fx1,Fx2,Fx3,Fx4为轮胎纵向力;Fy1,Fy2,Fy3,Fy4为轮胎侧偏力;lf为前轴与车辆质心的距离;lr为后轴与车辆质心的距离;δ为前轮转角。
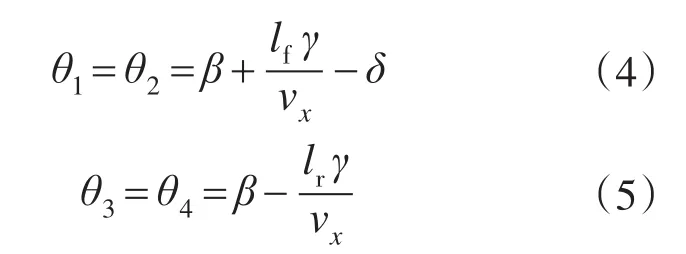
同时由图1的几何关系可得到前后轮侧偏角分别为
其中

式中:ki为各个轮胎侧偏刚度,i=1,2,3,4;θi为轮胎的侧偏角,i=1,2,3,4;β为质心侧偏角。
这里仅考虑小转角工况,则sinδ=δ,cosδ=1,Fx1δ为二阶微分项。
整理式(1)~式(5)并写成车辆动力学模型状态的空间方程:
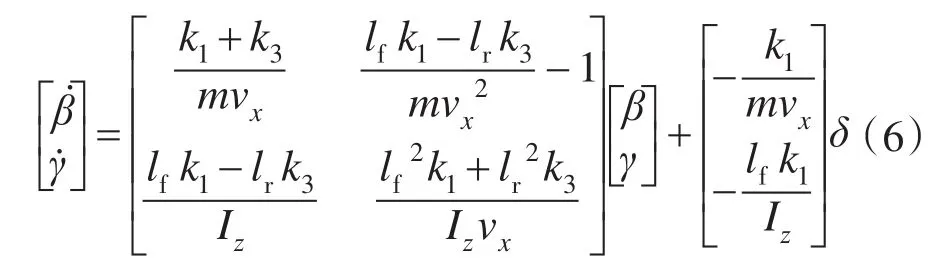
2.2 自主巡逻车转向控制策略分析
影响自主巡逻车车体稳定性转向的参量有3个:路面附着系数,转向输入角度和车速[13]。在转向过程中,路面附着系数和转向输入角度不是可控变量。在转向半径一定情况下,当转角相等时,随车速的升高,转向力矩逐渐增大,在回正的情况下,随车速的增加,回正残留角减小[14]。由式(6)得车体速度v与转向半径R关系为

稳定性系数K=m(k3lr-k1lf)/k1k3l2,由理想的线性车辆模型可知,车体的转动角度为质心侧偏角与横摆角之和,即:

当质心侧偏角较小忽略不计,则横摆角速度决定了车体的运动状态。即

由于路面附着系数不足以提供足够轮胎力,期望横摆角速度受到地面附着系数的限制。考虑到地面附着能力的限制,设置横摆角速度的上限为

式中:μ为轮胎和路面间的滑动系数。
同时不考虑车轮转向后倾、内倾及转向梯形的影响,方向盘转角与车轮前轮转角近似成线性关系:

式中:μ为方向盘角速度;θi为方向盘转角;λ为方向盘转角到车轮前轮转角的机械等效传动比。为保持车体稳定性,防止出现侧滑现象,由式(9)~式(11)得到车速与方向盘转角之间约束关系:
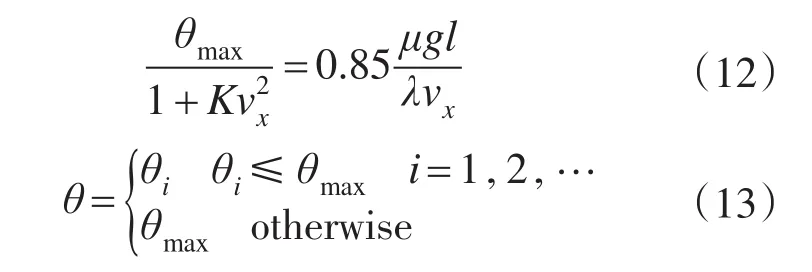
综上所述,在车体转向控制策略中,根据车速与方向盘转角之间的约束关系,要求在车体转向过程中,协调控制车体速度、前轮转角、方向盘转角3个变量,保证自主巡逻车稳定地转过期望角度。
3 自主巡逻车转向控制器设计
根据现有的车体控制理论和方法,利用控制前轮转角来改变作用在车轮上的侧偏力和纵向力的大小及方向,达到控制车体横摆角速度及质心侧偏角的目的,进而控制车体转角。车体转向控制系统(见图2)输入量为车体期望角度,转向过程中通过控制前轮转角、方向盘转角、车速等变量,以实现车体稳定转向,转过期望角度。

图2 自主巡逻车转向控制系统Fig.2 Steering control system of autonomous patrol car
自主巡逻车车体转向协调控制中,由于模糊控制能够较好适应工况非线性系统的控制,设计的模糊控制器根据目标转动角度差值和差值变化率,对前轮转角进行控制。方向盘转角控制中,结合方向盘转角与车速的约束关系,根据PID控制的特点,利用增量式PID控制算法。
3.1 模糊化接口
自主巡逻车实验中转动角度范围为(-180°,180°),车体的前轮转角的最大角度为30°,由于试验中在短时间内罗盘角度有跳跃,数值采用在上1 min中转过的角度与现1 min中转过的角度之间差值的平均值,其最大值为50(°)/s。在车体转动控制中,规定顺时针转动,转角增大,逆时针转动,转角减小。为了进行模糊化处理,必须将输入变量从基本论域转换到相应的模糊集论域。
设输入变量E1的基本论域为[-180°,180°],输入变量的模糊集论域为{-6,-5,…,0,…,5,6},即可以给出精确量模糊化的量化因子:ke1=6/180=1/30。E2的基本论域为[-50(°)/s,50(°)/s],为了使计算方便,模糊集论域同上,其量化因子ke2=6/50=0.12。把输入变量乘以量化因子,就能实现输入变量从基本论域到模糊集论域的转换。
根据输入变量的模糊集论域设定为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},把在这区间的连续量模糊化为:{NB,NM,NS,ZO,PS,PB,PM},分别表示负大,负中,负小,零,正小,正中,正大,对应着7个模糊子集,如表1所示。表1中的数值表示[-6,+6]之间13个元素在模糊集中的隶属度。

表1 模糊集论域隶属度Tab.1 The fuzzy setsmember ship
3.2 模糊规则库
根据模糊控制器的控制规则,E1,E2各有7个模糊变量,可给出一组模糊规则:

这样就产生了49条模糊规则,如表2所示。

表2 模糊控制规则表Tab.2 Fuzzy control rule
3.3 模糊推理
推理机在模糊控制器中的功能是:根据输入的模糊量和规则库完成模糊推理,并求解模糊关系方程,从而获得模糊控制量。控制量的模糊集U由模糊推理综合算法获得:
式中:R为模糊关系矩阵。
3.4 解模糊化接口
通过推理机进行模糊决策所得到的输出是模糊量,被控对象前轮转角只能接受一个清晰控制量,因此要进行控制必须经过清晰化接口将模糊量转换为精确量。其中U为[-30,-25,-20,-15,-10,-5,0,5,10,15,20,25,30],比例因子为5,其隶属度对应表1,本文采用系数加权平均法进行解模糊化运算:

式中:u为解模糊化后的控制量输出值;Ui为控制变量;μi为相应控制变量的隶属度,i=(1,2,…,13)。
3.5 方向盘转角PID控制

在方向盘转角的控制中,为了提高控制精度,避免超调,采用数字增量式PID控制。数字增量式PID方程如下:式中:Kp为PI调节时的比例系数;Ki为调节时的积分系数;Kd为调节时的微分系数;e(k)为给定值与反馈值的偏差分别为上次偏差和上上次偏差。
模糊控制器输出前轮转角后,根据前轮转角与方向盘转角之间传动比,以及方向盘转角与车体速度的约束关系,结合方向盘转角反馈值,得到方向盘转角控制器的输入量,进而控制方向盘转速。系统通过实时检测方向盘角位移控制器的输出,当转向角度偏差较大时,加大P参数。当转向角度转角差值较小时,方向盘角位移的控制量较小,此时方向盘已经到达某个位置,改变方向盘转速方向,开始回正。则重新给定角位移环的PID参数,具体的做法为增大P参数,加快方向盘回正速度,适当的调节I参数,减小稳态误差使方向盘精确回正。
由方向盘转角控制器输出方向盘转速控制量,在转向电机的控制板集成了LM629运动控制芯片,该芯片内置一个PID控制器,通过选择速度模式,对方向盘转速进行精确的伺服控制。
4 实验分析
论文提出的控制算法在装有电子罗盘,激光等传感器的自主巡逻车上进行实验。实验时初始化启动速度,车体原地静止启动,待速度稳定,给定转向角度。实际转向控制中自主巡逻车最大车速为3 m/s,方向盘最大转速为0.5 r/s,方向盘最大转角为1.5 r,因此试验中对车速1 m/s与2 m/s进行试验对比。实验中对不同的转向角度以及不同车速进行试验验证。
4.1 自主巡逻车60°转向实验
设定初始车速为1 m/s,稳定后,输入转向指令:转向角度60°。其车体车速、车体转向角度、期望方向盘转角和方向盘转角的变化曲线如图3所示。
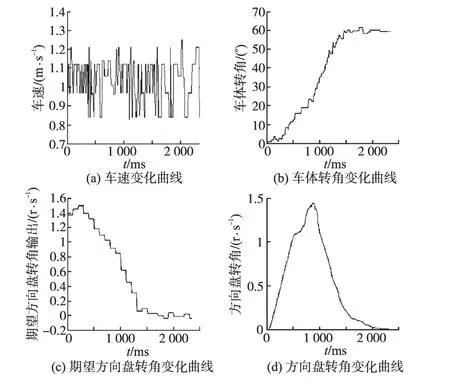
图3 车速1.0 m/s的自主巡逻车60°转向实验Fig.3 Autonomous patrol car turning 60°experiment at speed of 1.0 m/s
由图3所示开始阶段,角度差值较大,由模糊控制器计算得到的前轮转角值较大,经过计算得到期望方向盘转角值的大小,并通过方向盘转角控制器,通过计算得到期望方向盘转速,进而控制转向电机,改变方向盘角速度大小。所以开始阶段,方向盘转速保持最大,方向盘转角不断增加。当转过角度30°,而且转角角度方向为正向,此时方向盘角速度减小,并开始回正,角速度开始反向增大,减小方向盘转角。当转向角度达到48°时,转角角度差值变小,此时方向盘角速度开始减小,同时由模糊控制不断修正,最终完成转向,转向用时2 300 ms,实际转向角度为59.88°,实验表明,当进行小角度转向时,转向时间相对较短,转向精度较高。
4.2 自主巡逻车90°转向实验
1)设定初始车速为1 m/s,稳定后,输入转向指令:转向角度90°。其车体车速、车体转向角度、期望方向盘转角和方向盘转角的变化曲线如图4所示。

图4 车速1.0 m/s的自主巡逻车90°转向实验Fig.4 Autonomous patrol car turning 90°experiment at speed of 1.0 m/s
图4过程与转向角度60°的实验过程相似,较方向盘转角60°时实验回正时间较早,转向用时2 800 ms,实际转过角度为90.78°。
2)设定初始车速为2.0 m/s,稳定后,输入转向指令:转向角度90°。其车体车速、车体转向角度、期望方向盘转角和方向盘转角的变化曲线如图5所示。
在90°转向实验中1 m/s与2.0 m/s两者实验相比较,其中2.0 m/s的实验中,由于速度的限制,方向盘最大转角为1.2 r/s,进而致使方向盘转速的最大值持续时间比较短,转向耗时较长。转向用时3 300 ms,最终车体转角88.78°。

图5 车速2.0 m/s的自主巡逻车90°转向实验Fig.5 Autonomous patrol car turning 90°experiment at speed of 2.0 m/s
4.3 自主巡逻车120°转向实验
设定初始车速为1 m/s,稳定后,输入转向指令:转向角度120°。其车体车速、车体转向角度、期望方向盘转角和方向盘转角的变化曲线如图6所示。

图6 车速1.0 m/s的自主巡逻车120°转向实验Fig.6 Autonomous patrol car turning 120°experiment at speed of 1.0 m/s
图6实验表明,随着转向角度的增大,方向盘转角逐渐达到最大值,以及在最大值的保持时间也会增大,这样就可以保证转向的快速性,待方向盘达到回正条件时,方向盘开始反方向运行进行迅速回正,且在将要达到给定转角时,方向盘运行速度稳定,符合人工驾驶经验模型,转向用时4 200 ms,罗盘测得的实际转向角度为119.87°。
由实验图3~图6所示数据表明,在自主巡逻车转向过程中,方向盘转角以及方向盘转速根据转动角度差值的变化,随时改变;另一方面表明在车速较大时,由于车速与方向盘转角之间的约束关系,控制方向盘转角的大小。实验结果表明所设计的控制器能根据转向过程随时调整车速、方向盘转速等,有效控制自主巡逻车车体转向,使之稳定、精确转过期望的角度。
5 结论
本文将模糊控制理论与PID控制算法相融合,应用到自主巡逻车车体的转向控制中。分析了车体的动力学模型,推导出方向盘转角与行进速度之间关系;融合模糊控制算法以及PID控制算法,设计了自主巡逻车转向控制系统,期望转向角度作为控制系统输入量,在转向控制过程中,对方向盘转角、方向盘转速、车速进行协调控制。最后转向实验结果验证了模糊与PID控制算法能有效实现自主巡逻车的协调转向控制,满足转向过程中稳定性与精确性的要求。
[1]陈斌,魏朗.高速公路意外事件影响下的车辆跟驰模型[J].交通运输工程学报,2006,6(3):103-108.
[2]Cremean L B,Foote T B,Glluala J H.Alice:An Informationrich Autonomous Vehicle for High-speed Desert Navigation[J].Journal of Field Robotics,2006,23(10):777-810.
[3]王荣本,马雷.高速车辆变结构转向控制器切换超平面选取方法[J].机械工程学报,2004,40(10):83-86.
[4]Hang J M,Ren D B.Lateral Control of Vehicle for Lane Keeping in Intelligent Transportation Systems[C]//IEEE International Conference on Intelligent Human-machine Systems and Cybernetics,Hangzhou,China,2009:446-450.
[5]Pogluc,Ozguneru,Redmilka.Auto-mated Lane Change Controller Design[J].IEEE Transactions on Ntelligent Transportation Systems,2003,4(1):13-22.
[6]任殿波,张景明,崔胜明.自动化公路系统车队换道变结构控制[J].哈尔滨工业大学学报,2009,41(11):110-113.
[7]李以农,杨柳,郑玲,等.基于滑模控制的车辆纵转向耦合控制[J].中国机械工程,2007,18(7):866-870.
[8]Rajamani R.Vehicle Dynamics and Control[M].USA:Springer.2006.
[9]盖玉先,郭庆悌,宋健,等.汽车动力学稳定性的研究[J].哈尔滨工业大学学报,2006,38(12):2112-2115.
[10]Rajamani R,Zhu C,Alexander L.Lateral of a Backward Driven Front-steering Vehicle[J].Control Engineering Practice,2003,11(5):531-540.
[11]Enache N M,Mammar S,Netto M.Driver Steering Assistance for Lane-departure Avoidance Based on Hybrid Automata and Compositelyapunov Function[J].IEEE Transactions on Intelligent Transportation Systems,2010,11(1):28-39.
[12]Tanhs,Guldnerj,Chenc.Lane Changing with Look-down Referencesystems on Automated Highways[J].Control Engineering Practice,2000,8(9):1033-1043.
[13]李红志,李亮,杨财,等.车辆转向过程稳定性分析与控制[J].清 华 大 学 学 报 :自 然 科 学 版 ,2010,50(8):1282-1285.
[14]刘照,杨家军,廖道训.车速对汽车转向力矩的影响分析[J].中国机械工程,2005,16(8):748-751.
猜你喜欢
科学技术创新(2021年36期)2022-01-18 02:34:12
今日农业(2020年16期)2020-12-14 15:04:59
知识经济·中国直销(2018年3期)2018-04-12 06:43:36
传媒评论(2017年8期)2017-11-08 01:47:36
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
火控雷达技术(2016年1期)2016-02-06 02:18:01
中国铁道科学(2015年4期)2015-06-21 06:46:06
科学启蒙(2014年10期)2014-11-12 13:59:37
汽车零部件(2014年5期)2014-11-11 12:24:30
空间控制技术与应用(2009年2期)2009-12-20 08:30:14