
信标欠定时的井下人员定位算法*
2014-09-20 05:54陈丹丹
传感器与微系统 2014年3期
张 瑜, 陈丹丹, 吕 明
(河南师范大学 物理与电子工程学院,河南 新乡 453007)
0 引 言
鉴于煤矿井下空间狭窄, 无线通信质量差的现状,具有自组织、抗毁性强的无线传感器网络和具有低功耗、低成本、抗干扰性能强的Zig Bee技术已成为井下检测和定位的新技术载体[1,2]。但是,由于井下巷道狭小细长,这对于无线定位网络中的信标节点部署非常不利,信标节点(已知位置的参考节点)只能沿巷道呈带状分布,如果信标节点分布很密,就会极大地增加成本,因此,在实际应用中大都会根据信标节点的实际通信半径进行部署。
在井下人员定位中,常用3个及以上信标节点对目标节点(人员携带的未知节点)进行定位[3~5]。然而,煤矿井下的恶劣环境会使无线电波受多径、绕射和障碍物等因素的影响,使得有许多目标节点常常只能够接收到2个信标节点的信号,很难接收到3个及以上信标节点信号(此情况称为信标欠定),这会影响这部分目标节点的定位精度,甚至无法正常定位,因此,需要采用其他方法进行定位。另外,在井下人员跟踪定位的基于测距的和非测距两类方法中[6],TI公司推出的CC2430和带硬件引擎的CC2431使得基于RSSI测距技术的定位方法成为首选。但是,复杂的无线电波传播环境,使得由RSSI测量求得节点间的距离偏离实际情况,因此,也需要对RSSI的测距误差进行修正。
本文针对煤矿井下特殊的线型结构,首先给出了RSSI测距误差的修正方法,然后给出了信标欠定情况下的目标节点定位算法,以期满足绝大多数井下人员的定位需求。
1 基于RSSI测距误差的修正
1.1 无线电传播路径损耗模型
根据最接近实际巷道环境情况的无线信号传播的对数—常数分布模型[7],即
(1)
可以得到目标节点接收到的信标节点的信号强度RSSI为
RSSI=A-10nlgd-Xδ,
(2)
式中PL(d)为经过距离d后的路径损耗,d0为参考距离,PL(d0)为经过距离d0的路径损耗,n为路径损耗指数,Xδ为均值为0、标准差为μ的高斯随机分布,A为距离发射节点1 m处的信号强度,A=Pt-PL(d0),Pt为信标节点的发射功率。
由于Xδ的均值为0,如在信标节点和目标节点间进行多次测量RSSI,然后得到其平均值为
(3)
由式(3)可以得到信标节点和目标节点间的距离为
(4)

1.2 测距误差修正
在巷道中设置信标节点时,最少应使得相邻的3个信标节点间具有通信功能。假设某一相邻3个信标节点分别为Nj,Nj+1,Nj+2,j=1,2,3,…,m-2,m为信标数目,它们之间的真实距离分别为Dj,j+1,Dj+1,j+2,Dj+2,j,信标节点间由RSSI得到的距离分别为dj,j+1,dj+1,j+2,dj+2,j。再假设信标节点Nj+1为目标节点收到RSSI最强的信标节点,这里称为盲节点。为了反映因不同信标节点所处环境引起的盲节点与其他两信标节点间测量距离和实际距离误差的差异,引入比例调整因子α,定义为
(5)
为了对目标节点由RSSI得到的距离量进行修正,再引入目标节点i到信标节点的距离修正因子λi,其公式为
(6)

这样,目标节点到信标节点的修正后距离di为
di=ci+λiδ.
(7)
在实际应用中,通过利用式(4)~式(7)可以得到较精确的目标节点与信标节点间的距离。
2 信标欠定情况下的定位算法
当目标节点可以与3个信标节点通信时,利用修正后的目标节点与信标节点间距离量,通过三边测量法和加权质心方法可以获得目标节点的位置[8~10]。然而,许多情况下存在目标节点只能接收到2个信标信号(接收一个信标信号的情况很少)。在这种信标欠定情况下,常用的三点或多点定位方法无法进行,一般情况下,大都以2个信标节点为圆心,以目标节点与信标节点间距离为半径,形成的2个圆相交的2个交点中心点的位置即为目标节点的位置,这里称为两圆相交法。但是,如果两圆相交的两交点距离较大时,会产生很大的误差,这里给出了采用坐标变换的定位方法。

图1 两坐标系下信标和目标节点的位置
在坐标系x′o′y′中,利用RSSI测量经修正后的目标节点与两信标节点的距离di,j,di,j+1和几何关系,可以建立方程为
(8)
整理式(8)后有
(9)
则
(10)


从图1的几何关系可以看出,将坐标系x′o′y′进行旋转和平移后可以得到全局坐标xoy。旋转角度θ和平移参数Δx,Δy分别为
(11)
根据坐标系的旋转和平移公式可以得到目标节点的全局坐标为
(12)
3 仿真结果与分析
为了检验算法的性能,对本文提出的信标欠定时的定位算法效果进行仿真。首先假设仿真区域内的目标节点能够接收到3个信标节点,然后利用三边测量法进行定位。再假设目标节点只能接收到3个信标的其中2个,用本文提出的定位方法和两圆相交法进行计算,通过比较三者的误差获得本文提出方法的定位效果。
假设在巷道某一个区域为200 m×10 m,仿真区域中信标节点共11个,每隔40 m均匀交叉分布在巷道两侧,未知节点49个随机分布在仿真区域中,每个节点的通信半径均为70 m,仿真结果如图2、图3所示。
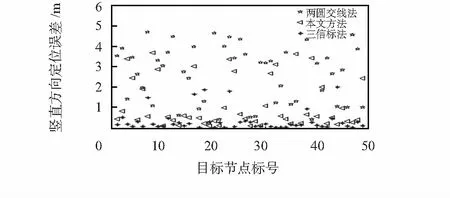
图2 3种方法在水平方向定位误差比较

图3 3种方法在竖直方向定位误差比较
从图2、图3中可以看出:在垂直于巷道的水平方向上,本文的算法与两圆相交法在信标欠定时的最大定位误差分别为1.96,8.11 m;平均定位误差分别为0.33,4.13 m;定位误差在1 m以下的概率分别为89.8 %,20.4 %。在平行于巷道的竖直方向上,本文的算法与两圆相交法在信标欠定时的最大定位误差分别为3.68,4.85 m;平均定位误差分别为1.15,2.65 m;定位误差在1 m以下的概率分别为67.4 %,14.3 %。说明在信标欠定时利用本文的方法可以较大地提高定位精度。
尽管本文方法的定位精度稍小于能够利用3个以上信标时的定位精度(水平方向上最大定位误差和平均定位误差分别为0.14,0.08 m;定位误差在1 m以下的概率为100 %。竖直方向上最大定位误差和平均定位误差分别为2.03,0.36 m;定位误差在1 m以下的概率为89.8 %),但是,在信标欠定时三信标法无能为力,这样,利用本文方法可以对信标欠定情况下的目标节点进行有效定位,并且定位精度也能够满足煤矿井下人员定位的基本要求。。
4 结 论
针对煤矿井下巷道特殊的线型模型,本文提出了信标欠定情况下的井下人员定位方法,仿真结果也证明了该方法具有较好的定位精度。该方法可以对未能收到3个信标节点信息的目标节点进行有效地定位,弥补了现有都是基于三信标及其以上情况下目标节点定位的不足。将本文方法与常用三信标法结合可以对绝大多数井下人员实施定位。该定位算法也可以扩展应用于其它线型无线传感器网络中。
参考文献:
[1] 李 娟,王 珂,李 莉,等.基于锚圆交点加权质心的无线传感器网络定位算法[J].吉林大学学报:工学版,2009,39(6):1649-1653.
[2] 戴国华,易灵芝,王根平.一种新的基于Zig Bee技术定位算法[J].计算机测量与控制,2012,20(4):1105-1107.
[3] 王琰琳,黄友锐,曲立国.改进型质心算法在井下人员定位中的应用[J].煤矿机械,2012,33(8):76-78.
[4] 张兴会,邓志东.基于无线传感器网络的地下矿工定位算法[J].计算机测量与控制,2008,16(12):2003-2005.
[5] 罗炬锋,付耀先,王营冠.基于RSSI测距的WLS定位算法[J].华中科技大学学报:自然科学版,2011,39(11):34-38.
[6] 孙利民,李建中,陈 渝.无线传感器网络[M].北京:清华大学出版社,2005.
[7] 江 冰,吴元忠,谢冬梅.无线传感器网络节点自定位算法的研究[J].传感技术学报,2007,20(6):1381-1386.
[8] 伍春燕.基于Zig Bee技术的井下人员定位算法研究[D].长沙:中南大学,2012.
[9] 花 超,吉小军,蔡 萍,等.基于RSSI差分修正的加权质心定位算法[J].传感器与微系统,2012,31(5):139-144.
[10] 陈维克.基于RSSI的无线传感器网络加权质心定位算法[J].武汉理工大学学报:交通科学与工程版,2006,30(2):265-26.
猜你喜欢
商品与质量(2021年43期)2022-01-18
无线互联科技(2021年4期)2021-04-21
矿产勘查(2020年9期)2020-12-25
建材发展导向(2019年5期)2019-09-09
小猕猴智力画刊(2019年3期)2019-04-19
电子制作(2018年23期)2018-12-26
电子制作(2018年19期)2018-11-14
铁道通信信号(2018年3期)2018-04-19
采矿与岩层控制工程学报(2015年3期)2015-12-16
长春理工大学学报(自然科学版)(2015年4期)2015-12-07
