一种光泵/GPS组合的飞行器背景磁场学习与补偿方法*
2014-09-20 09:27周建军林春生
弹箭与制导学报 2014年1期
周建军,林春生,夏 维
(1海军工程大学兵器工程系,武汉 430033;2海军军事代表室,广东湛江 524000)
0 引言
在航空磁测领域,补偿飞行器的背景磁场是提高测量精度的重要前提[1]。20世纪40年代,Tolles和Lawson建立了飞行器背景磁场模型。由于模型存在较强的复共线性,直接求解模型参数精度不高[2-3]。之后Bicklel又提出了一种小信号求解方法,该方法要求飞行器学习时选择一块磁场均匀的区域在4个航向上进行小角度的机动飞行[4-5]。在获取学习与补偿的测量数据时,现有的方法是利用光泵测量总磁场,利用磁通门获取方向余弦。但是在磁场不均匀的地区(如铁矿区),或飞行器背景磁场过大时(传感器安装在飞行器内部或飞行器做转弯等较大幅度的机动),利用磁通门获取方向余弦会带来较大的误差。文献[6]提出了一种利用光泵与GPS数据进行学习与补偿的方法,并进行了机载试验,但报告中没有给出推导过程。该方法在国内还未见报道。文中研究了利用光泵/磁通门进行模型求解与补偿的原理,并详细推导了利用光泵/GPS进行模型求解与补偿的方法。
1 飞行器背景磁场模型与求解
飞行器背景磁场包括剩余磁场、感应磁场和涡流磁场三部分。以飞行器上光泵为坐标原点,建立图1所示的坐标系,其中,X轴与飞行器纵轴平行,向前为正;Y轴与飞行器横轴平行,向右为正;Z轴与飞行器的垂直轴平行,向下为正。Hd表示飞行器背景磁场矢量,H0为地磁场矢量,Hc为光泵测量的地磁场与飞行器背景磁场的复合场。

图1 飞行器磁场模型坐标系
X0、Y0、Z0为X、Y、Z轴与H0的夹角。设根据Tolles-Lawson模型,飞行器背景磁场可以表示为[3]:

式中:pi、aij和bij分别为剩磁参数、感磁参数和涡磁参数。u'i为方向余弦ui的导数。且aij=aji,a33=0,b33=0。那么总的模型参数一共有16项。由于阶数较高,直接求解式(1),方程存在较强的复共线性,难以精确求解。目前国际上通用的方法是采用Bickel提出的小信号求解方法,该方法要求飞行器沿4个不同航向做小幅度机动来获取学习样本。
当飞行器沿直线做小幅机动飞行时,近似有[4]:

其中:Ui为直航向的方向余弦;vi(t)为方向余弦小量,那么由于机动产生的磁场变化量为:

由式(1)与式(3)可以得到,飞行器机动产生的磁场变化量为:

其中:

式中:si、vi分别为机动产生的背景磁场小量与方向余弦小量;v'i是vi的导数;wi、Ui是与航向有关的参数,wi由式(4)求得,si、vi、vi'、Ui是可测量信号。式(5)包含pi、aij8个未知参数,式(6)包含bij8个未知参数。采集四航向的数据,联立求解式(4)、式(5)与式(6)可求出模型参数。
2 基于光泵/磁通门的模型求解与补偿方法
在获取学习与补偿的测量数据时,目前常用的方法是利用光泵测量总磁场,利用三轴磁通门获取方向余弦。
当飞行器沿直线做小幅度机动时,令Hc(t)为光泵测量磁场,那么:

HL(t)为飞行器沿直航向飞行时的背景磁场,H0(t)为地磁场,s(t)为飞行器机动引起的磁场变化小量。若Hd(t)表示飞行器背景磁场,那么在该航向上:

设计合适的滤波器f可以获取s(t)值:

三轴磁通门主要用于获取飞行器的方向余弦值,当飞行器沿直线做小幅机动时,三轴探头实际输出H(t)可表示成:

式中:h(t)为飞行器机动引起的地磁分量变化,Hb(t)为飞行器在安装点产生的背景磁场矢量,H0(t)为地磁场矢量。设计合适的滤波器g可以获取h(t):

利用磁通门测量值可以计算出飞行器在该航向下的方向余弦Ui与机动引起的方向余弦小量vi(t)。考虑到地磁场远大于飞行器背景磁场,在计算Ui时,常忽略飞行器的背景磁场,采用下式简化计算:
通过式(9)、式(12)和式(13)可以获得小信号模型求解的数据样本,计算出模型参数。
在补偿阶段,当飞行器进入新的航向时,通过同样的方法可以实时获取飞行器在该航向上的方向余弦Ui与方向余弦小量vi(t)。将计算的模型参数pi、aij和bij代入式(4)、式(5)、式(6)可以实时计算出飞行器机动引起的背景磁场变化量s(t)。将Ui与pi、aij和bij代入式(1)可以实时计算出该航向下的背景磁场HL(t)。设补偿之后的光泵测量值为Hcp(t),那么:

3 基于光泵/GPS的模型求解与补偿方法
在地磁场不均匀的地区或者当背景磁场较大时,通过磁通门获取方向余弦会带来较大的误差。利用GPS数据同样可以获取飞行器的方向余弦,且GPS测量时不受飞行器背景磁场与环境磁场的影响。下面介绍利用GPS获取方向余弦的方法并给出具体的推导过程。学习与补偿时,仍然利用光泵测量总磁场。
当飞行器沿直航向飞行时,设磁航向角为θ,飞行区域的磁纬度角为φ,地磁场为H0,以光泵为原点,建立图1所示的坐标系。由几何关系可知在直航向条件下有:

(H0x,H0y,H0z)表示直航向下的 H0在 X、Y、Z 轴上的投影。
当飞行器做机动时,方向余弦发生变化。下面分别推导飞行器做横滚、俯仰和摇摆机动时,方向余弦与机动角度的关系。
当飞行器在直航向下做横滚机动时,设横滚角为αR,飞行器向右侧下摆时αR为正,那么:

式中 (Hx,Hy,Hz)TR表示飞行器做横滚时 H0在 X、Y、Z轴上的投影。
飞行器在直航向做俯仰机动时,设横滚角为αP,飞行器上仰时αP为正,那么:
式中 (Hx,Hy,Hz)TP表示飞行器做俯仰时 H0在 X、Y、Z轴上的投影。
飞行器在直航向做偏航机动时,设偏航角为αH,飞行器右偏时αH为正,那么:

式中 (Hx,Hy,Hz)TH表示飞行器做偏航时 H0在X、Y、Z轴上的投影。
由式(16)~式(18)可知,当飞行器做机动时,H0在 X、Y、Z 轴上的投影 (Hx,Hy,Hz)TRPH满足下式:

由式(15)与式(19)可知,飞行器在直航向做机动的方向余弦满足:
式中:θ与φ是可以直接获取的已知量,由式(20)可知,只要实时测量出机动角就可以实时获取飞行时的方向余弦。
下面介绍利用GPS数据获取飞行器机动角的方法。飞行器示意图如图2所示。
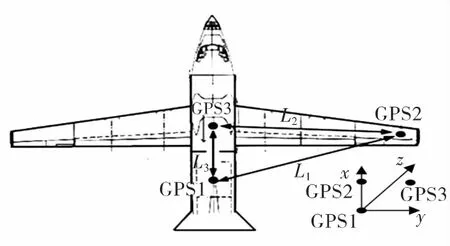
图2 飞行器与GPS天线安装示意图
为了实时获取机动时的角度信息,在飞行器翼尖、机身中部以及机身尾部分别安装3套GPS系统,GPS天线的安装位置如图2所示,其中GPS1与GPS2的天线连线与飞行器运动方向相同,L1、L2、L3分别为GPS天线之间的相互距离。以GPS1的位置为坐标原点建立载体坐标系,X轴指向飞行器的运动方向,向前为正,Y轴指向飞行器的横轴方向,向右为正,Z轴垂直于飞行器平面,向下为正。在计算姿态时,将GPS1的定位结果作为当地水平坐标系下的原点,将GPS2与GPS3的定位结果转换为当地水平坐标系下的坐标。设3套GPS系统转换后的坐标输出值分别为
那么可以得到飞行器机动角度满足如下关系[7]:
求得航向角与俯仰角后可由下式计算出横滚角:

式中:

将式(21)、式(22)代入式(20),即可实时求得方向余弦,完成背景磁场的建模与补偿。另外,由于飞行器是刚性连接,利用2套GPS就可实现飞行器姿态角的测量[8]。
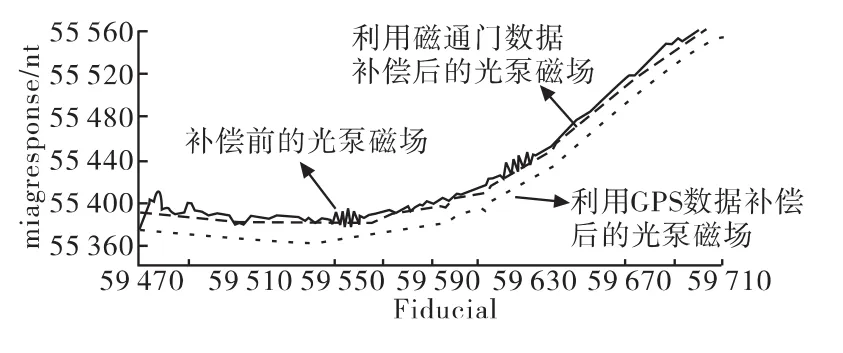
图3 利用磁通门或GPS数据的补偿结果
图3给出了在实际试验中利用光泵/磁通门数据与光泵/GPS数据补偿同一架飞行器背景磁场后的光泵数据曲线[6]。图中磁通门与 GPS采样率均为10 Hz。从结果可知利用GPS数据可以有效补偿背景磁场。
4 结语
在地磁场不均匀区域或当背景磁场过大时,利用磁通门获取方向余弦会带来较大的误差。文中在分析飞行器背景磁场模型与求解的基础上,研究了利用光泵/磁通门进行模型求解与补偿的原理,推导了机动角度与方向余弦之间的关系,并详细推导了利用光泵/GPS进行模型求解与补偿的方法,从实际补偿效果看,该方法能够有效补偿飞行器的背景磁场。从而为复杂磁环境以及大机动条件下的背景磁场补偿提供技术参考。
[1]张昌达.航空磁力梯度张量测量—航空磁测技术的最新进展[J].工程地球物理学报,2006,3(5):354-361.
[2]Leach BW.Aeromagnetic compensation as a linear regression problem[M].Information Linkage Between Applied Mathematics and Industry,1980:139-161.
[3]庞学亮,林春生,张宁.飞机磁场模型系数的截断奇异值分解法估计[J].探测与控制学报,2009,31(5):48-51.
[4]Bickel S H.Small signal compensation of magnetic fields resulting from aircraft maneuvers[J].IEEE Trans.On AES,1979,15(4):515-525.
[5]何敬礼.飞机磁场的自动补偿方法[J].物探与化探,1985,9(6):464 -469.
[6]John J,Bob L,Ross G.Final report on improved aeromagnetic compensation for OMET program[R].2004.
[7]陈杨,唐艳,周伟,等.三天线GPS姿态解算误差分析[J].全球定位系统,2012,37(3):16 -18.
[8]韦庆洲,罗兆文,朱昱,等.基于GPS的飞机姿态实时测量实现及误差分析[J].测绘科学,2010,35(4):20 -22.
猜你喜欢
大电机技术(2022年5期)2022-11-17
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
微特电机(2022年1期)2022-02-11
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
弹箭与制导学报(2018年1期)2018-11-13
中学数学杂志(高中版)(2016年6期)2017-03-01
福建中学数学(2016年7期)2016-12-03
北京航空航天大学学报(2016年9期)2016-11-16