
水性阻尼材料在潜标湍流仪中减振效果研究
2014-09-19 05:31王书新宋大雷王永芳苏兆龙闫启志
振动与冲击 2014年20期
王书新,栾 新,宋大雷,王永芳,苏兆龙,闫启志
(1.中国海洋大学 信息科学与工程学院,山东 青岛 266003;2.中国海洋大学 工程学院,山东 青岛 266003)
海水剪切流速数据为研究海洋湍流混合过程及计算湍动能耗散率重要原始数据资料[1]。海洋湍流观测平台由水平拖曳式[2]发展到垂直剖面式[3],由短期观测扩展至长期定点观测。潜标湍流仪为长期测量、观测深海湍流的有效平台,对海洋科学研究具有重要意义。Osborn[4]研制出第一台携带剪切型探头的垂直剖面仪,Lueck等[5]研发出可长期自动测量深海湍流数据能力的TAMI(Tethered Autonomous Microstructure Instrument)。柴宝连等[6-7]研制出海洋微结构湍流剖面仪样机,Song等[8]研发出可同时用于水平、垂直两种测量平台的湍流观测仪。
无论垂直或水平观测平台,湍流仪在工作过程中产生的振动均会严重影响测量数据的准确度。分析振动源对湍流仪优化设计、提高测量精度、减少噪声污染非常必要。为此,本文针对中国海洋大学研发的湍流观测仪,介绍测量原理,分析工作过程中噪声来源;综合已有减振方法,对用低温域水性阻尼材料喷涂在湍流仪电子舱体上的减振效果进行数据分析。
1 湍流测量原理-剪切探头工作原理
剪切型探头作为观测湍流的有效传感器,决定湍流观测仪的测量原理。剪切探头基本结构见图1,其中压电陶瓷为探头核心部分可将受力信号转化为电荷信号。压电陶瓷具有响应快、能量密度高等特点,橡皮头受力通过悬臂梁传递。压电陶瓷受力时产生的电荷通过导线传出。探头外部的钛外壳、聚四氟乙烯主要起保护作用,防止探头触伤、潮湿。后半部分为连接探头与实验仪器内部导线,由环氧树脂填塞物与不锈钢保护套组成。
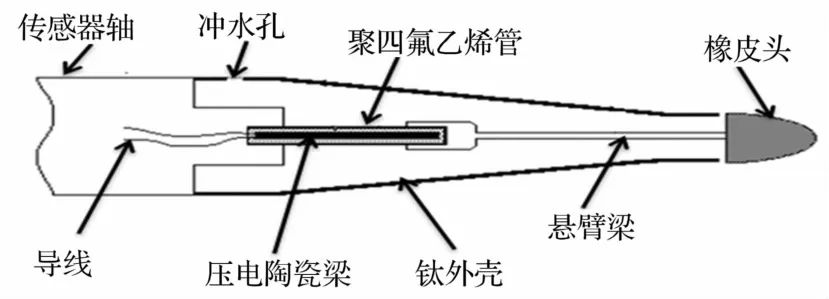
图1 剪切流探头结构Fig.1 Structure of shear sensor
Osborn等对探头的受力过程详细描述,即单位长度受力可表示为

式中:ρ为液体密度;A为受力面积;x为由探头顶点至受力点距离;ν为流速;α为探头受力方向与中心轴线夹角(实际测量中需保证小于10°)。
由探头顶部至探头根部(距离L)受力积分即为整个探头受力,表示为

探头内部压电陶瓷在灵敏轴上受力最易弯曲,产生的电荷通过导线传出,由剪切探头输出的电荷信号可表示为

式中:U为流速;W为沿探头轴线流速;u为垂直于探头轴线流速;S为探头灵敏度,S的典型值为(0.05~0.10)×10-9C/m2s2,温度变化对 S有轻微影响;2为实验室修订值。
剪切探头测量海水剪切力信号转换示意图见图2。

图2 信号转换过程示意图Fig.2 Signal conversion process
由剪切探头工作原理知,影响其测量精度因素有海水密度ρ、剪切流传感器灵敏度 S及输出电压信号Qp。其中密度ρ的波动主要由海水盐度、温度等引起,为不可控因素;传感器灵敏度 S由传感器自身特性决定;电荷信号Qp直接受仪器振动影响。为提高湍流仪测量精度及有效识别测量信号中污染噪声,据海试结果,分析总结湍流仪各种振动噪声来源及降低对测量精度影响方法。
2 潜标湍流仪振动源分析
海试在青岛胶州湾(120°06′~120°21′E,36°00′~36°12′N)进行,仪器放置深度 60~80 m,流速 0.30 m/s,水温2.7℃。试验平台搭建及分布结构见图3。主要分五部分,即浮球、CTD、湍流观测仪、海流计、声学释放器及重力锚块。
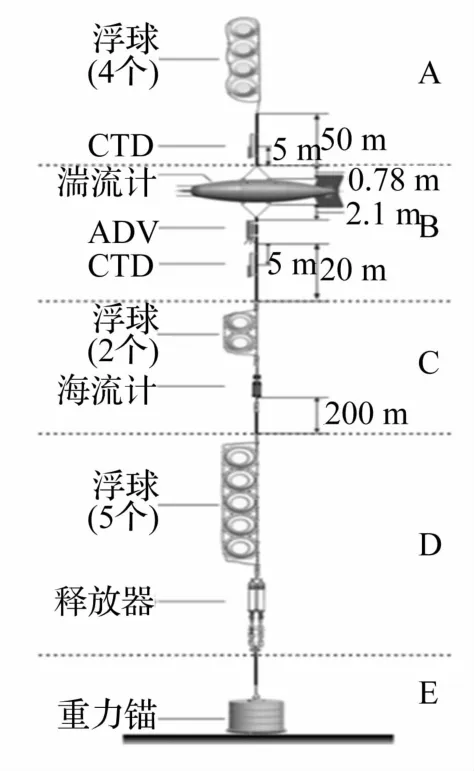
图3 基于锚系潜标系统的FMSOUCFig.3 FMSOUC based on mooring system
分析海试结果知,影响测量精度振动元有三种:
(1)系缆传递给湍流仪的振动。整个潜标系统在海平面以下,当湍流仪上层海水受风力影响推动浮球运动时,通过浮球与湍流仪间连接系缆将运动产生的振动传递给湍流仪。对此,可增加湍流仪惯性减少振动,亦可采取在壳体与电子仪器舱连接间增加阻尼或隔离元件。Lueck等在TAMI中用复合泡沫塑料减少振动。本文用低温域水性阻尼材料增加阻尼。
(2)涡致振动[9]。海水流过湍流仪时其流动方向垂直于湍流仪轴向(称翼展方向)会发生圆柱绕流现象。圆柱绕流及伴随其产生脱涡现象受雷诺系数影响,随雷诺数增大,会在湍流仪表面形成Karman涡街,并湍流仪两侧交替发生脱涡过程,使湍流仪四周应力产生周期性波动,致湍流仪承受周期性作用力,导致湍流仪产生涡致振动。对此可增大湍流仪壳体直径,改变壳体尾翼设计。
(3)剪切传感器自身振动。该震动分两种,即电子舱体传递的振动及受流体运动影响产生的涡致振动。为此,可将探头设计成流线型结构,安装时缩短悬臂长度[10],以增加固有频率。
3 水性阻尼材料减振方案设计
为减小系缆传递振动对湍流信号测量结果影响,在系缆与电子仪器间连接处增加阻尼材料。为测试材料减振效果,进行减振效果试验。所用低温域水性阻尼材料主要化学成分为丙烯酸IPN乳液、阻尼颜填料、助剂[11]等。该水性阻尼材料常用于铁路机车、轮船、风机等减振降噪,在低温下(-40℃~50℃)具有优良的阻尼及消音效果,且其物理特性如耐盐腐蚀性、耐低温性、耐深海压力性均符合潜标湍流仪海洋测量的应用环境。主要指标见表1。
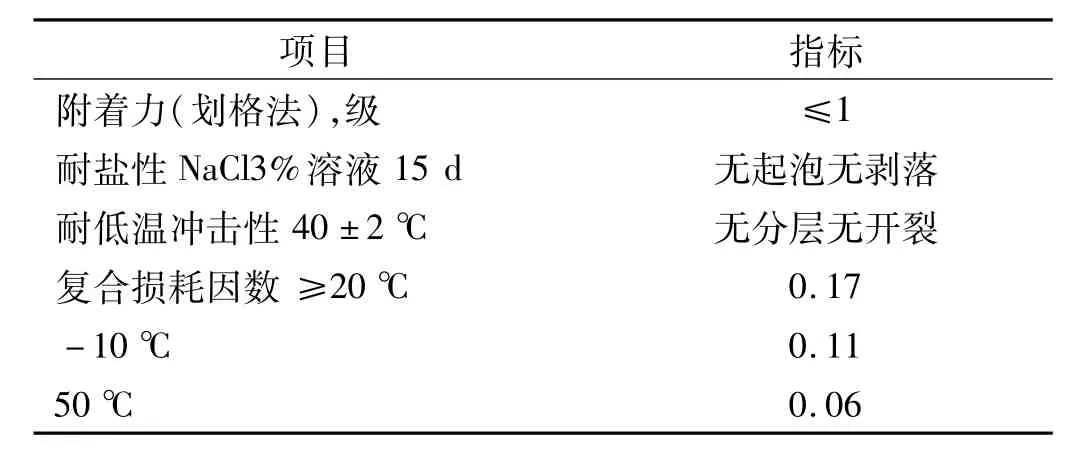
表1 阻尼材料项目指标Tab.1 Index of damping material
阻尼材料达到较好减振效果须满足两条件:① 阻尼材料厚度须为底材厚度的1.5~2倍,而湍流仪电子舱体壁厚6 mm,阻尼材料厚度应10 mm;② 阻尼材料须喷涂于湍流仪电子舱体与测量平台(潜标浮体)连接位置,宽度须大于连接固定的抱箍宽度,即轴向尺寸100 mm,距电子舱体两顶端50 mm。喷涂后电子舱体实物见图4。
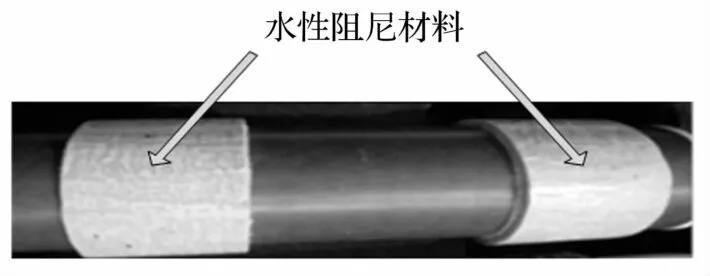
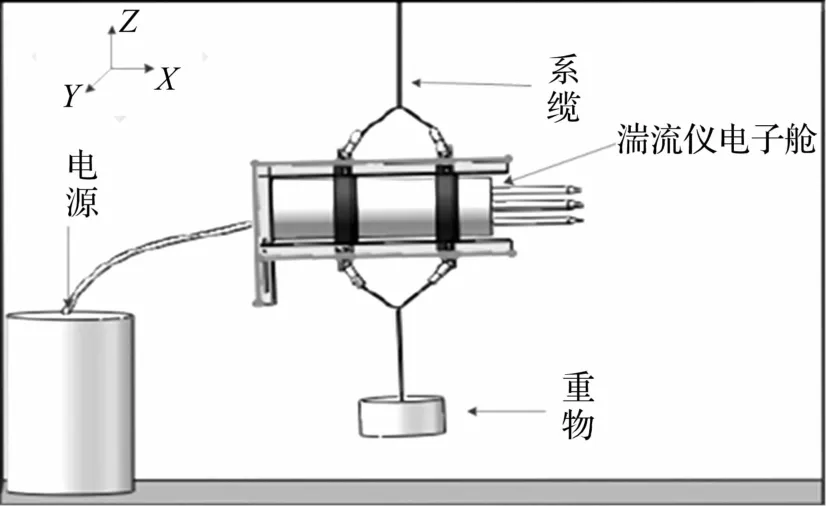
图5 减振试验原理图Fig.5 Test of damping vibration
对比试验分两组进行,一组为无阻尼材料的电子舱体振动试验,一组为涂阻尼材料的电子舱体振动试验。试验中给系缆一定激力,仪器中姿态传感器记录电子舱体三轴加速度信号,用于评价减振效果。减振试验原理见图5。其中深黑色表示系缆结构与电子舱体连接位置,为系缆将振动传递给电子舱体的主要区域。
4 减振试验数据分析
对两组试验所得三轴加速度信号进行数值分析。由于湍流剪切信号为低频信号,姿态传感器主要测量亦为低频信号。为研究振动噪声对湍流测量精度影响,分析时仅考虑低频。两组试验三轴加速度在1 min内的时域信号见图6,其中浅色为无阻尼材料(组1)的加速度信号,深色为涂阻尼材料(组2)的加速度信号。可以看出,深色曲线信号波动范围明显小于浅色曲线。
加速度标准差代表信号的聚散程度。由表2看出,组2标准差远小于组1,说明组2加速度信号聚合程度高,波动范围小,阻尼材料减振效果明显。
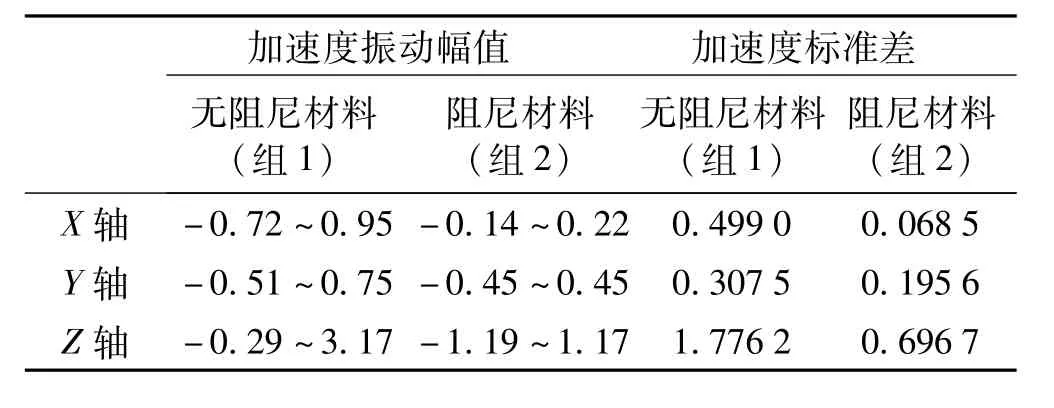
表2 加速度幅值及标准差Tab.2 Amplitude and the standard deviation of acceleration
三轴加速度信号经傅里叶变换所得见图7。由图7看出,在1~20 Hz内,有阻尼材料信号(深色线)振动幅值较无阻尼材料(浅色线)信号降低明显,X、Z轴信号变化尤其明显,说明阻尼材料在该频率段内减震效果显著。三轴加速度功率谱信号见图8。由图8看出,在1~60 Hz内,有阻尼材料信号(深色线)能量较无阻尼材料信号(浅色线)能量小,表示涂阻尼材料的电子舱体振动能量小。

图7 加速度傅里叶变换Fig.7 Fourier transform of triaxial acceleration signal
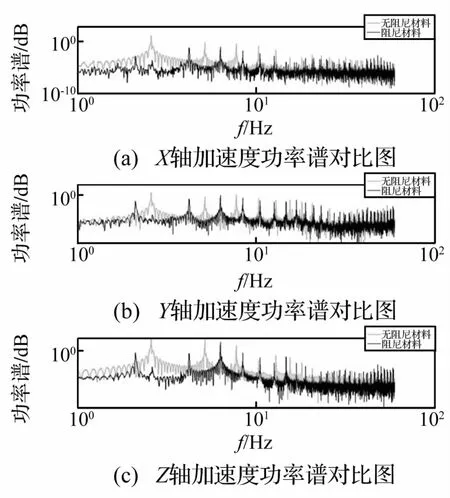
图8 加速度功率谱Fig.8 PSD of triaxial acceleration signal
对三轴加速度功率谱在1~60 Hz频率内积分见表3。由表3看出,有阻尼材料信号(深色线)能量显著减少,阻尼材料减振效果明显。三轴方向阻尼材料减振效果不同:X轴>Z轴>Y轴,与施加的振源激力方向相关。激力分解在三轴方向的振动能量不一致可能导致阻尼材料减振效果有强、弱。振动源激力方向与三轴减振幅度间关系需进一步试验验证及分析。
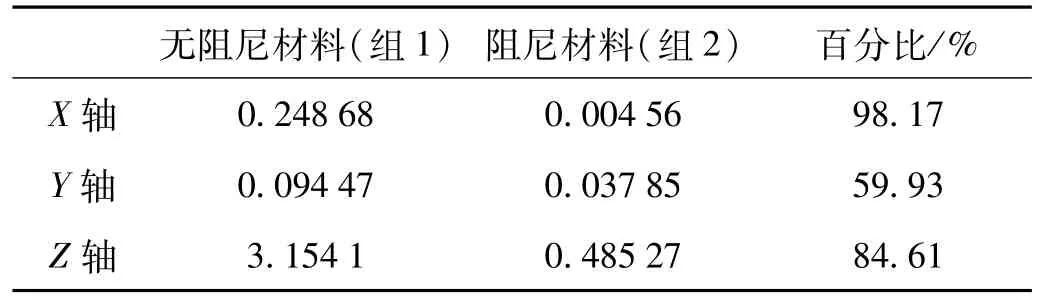
表3 三轴加速度功率谱积分Tab.3 Integral of triaxial acceleration power spectrum
5 结 论
(1)导致潜标湍流仪观测环境不稳定因素较多,如系缆传递的波浪振动、海流引起的涡致振动、剪切探头自身振动等,本文据不同振动源提出不同减振策略。
(2)对系缆传递的振动,可在壳体与电子仪器舱连接之间喷涂低温域水性阻尼材料,降低振动。
(3)减振原理试验及数据分析结果表明,本文采用阻尼材料减振方案可有效减少振动大小及能量,为提高湍流测量精度行之有效方法。
[1]康建军,邬海强,杨庆轩,等.海洋湍流观测技术[J].海洋技术,2007,26(3):19-23.KANG Jianjun,WU Haiqiang,YANG Qingxuan.Ocean turbulence measurement technology[J].Ocean Technology,2007,26(3):19-23.
[2]Grant H L,Stewart R W,Moilliet A.Turbulence spectra from a tidal channel[J].J.Fluid Mech.,1962,12(2):241-268.
[3]Osborn T R.Estimates of the local rate of vertical diffusion from dissipation measurements[J].Journal of Physical Oceanography,1980,10(1):83-89.
[4]Osborn T R.Vertical profiling of velocity microstructure[J].J.Phys.Oceanogr,1974,4(1):109-115.
[5]Lueck R G,Huang D,Newman D,et al.Turbulence measurement with a moored instrument[J].Journal of Atmospheric and Oceanic Technology,1997,14(1):143-161.
[6]柴宝连,张大涛,王延辉,等.湍流剖面仪控制系统硬件设计与实现[J].电子器件,2006,29(1):138-141.CHAI Baolian,ZHANG Datao,WANG Yanhui,et al.Hardware of the control system for shear profiler[J].Chinese Journal of Electron Devices,2006,29(1):138-141.
[7]张大涛,王延辉,王树新.湍流剖面仪系统动力学分析与实验研究[J].海洋技术,2006,25(1):38-42.ZHANG Datao,WANG Yanhui,WANG Shuxin,et al.Dynamics analysis and experiment research for shear profiler[J].Ocean Technology,2006,25(1):38-42.
[8]Song Dalei,Sun Jingjing,Xue Bing,et al.The fixedpoint ocean turbulence observation on submerged buoy[C].Intelligent Control, Automatic Detection and HighEnd Equipment(ICADE),2012:72-77.
[9]李保庆.圆柱涡致振动控制的实验研究[D].合肥:中国科学技术大学,2008.
[10]兰世泉,刘玉红,王延辉,等.垂直微结构湍流剖面仪振动源及减振方法分析[J].振动与冲击,2012,31(18):5-9.LAN Shiquan,LIU Yuhong,WANG Yanhui,et al.Vibratian source analysis and vibration reduction for a vertical microstructure turbulence profiler[J].Journal of Vibration and Shock,2012,31(18):5-9.
[11]张忠明,刘宏昭,王锦程,等.材料阻尼及阻尼材料的研究进展[J].功能材料,2001,32(3):227-230.ZHANG Zhongming,LIU Hongzhao,WANG Jincheng,et al.Damping of materials and progress in the damping materials[J].Journal of Functional Materials, 2001,32(3):227-230.
猜你喜欢
水道港口(2022年1期)2022-05-18
航天制造技术(2021年5期)2021-11-06
空气动力学学报(2020年1期)2020-11-29
上海航天(2020年3期)2020-07-01
装备制造技术(2020年12期)2020-05-22
宇航总体技术(2019年4期)2019-08-06
中国特种设备安全(2018年10期)2018-12-18
船海工程(2018年1期)2018-03-01
国外科技新书评介(2014年5期)2014-12-17
船舶(2014年2期)2014-01-04
