
通用型变频器电流超调分析与补偿
2014-09-10 08:09汪剑波范夕庆魏梦真张俊丰
综合智慧能源 2014年3期
汪剑波,范夕庆,魏梦真,张俊丰
(1.北京市电力公司通州供电公司,北京 101100; 2.浙江丽水电业局,浙江 丽水 323000;3. 国网吉林省电力有限公司,长春 130000)
0 引言
通用型变频器作为节约能源的关键设备,在发电、煤矿、造纸等领域有着广泛的应用。通用型变频器采用单元串联式多电平结构,具有输入功率因数高、输出谐波低、技术成熟等优点。这种变频器常用的控制策略是移相正弦脉宽调制法(SPWM),算法直观,实现简单。但由于上述算法缺乏对转矩的有效控制,变频系统带载时动态响应速度慢,故变频器运行频率改变时,输出电流会突变,电机也会随之抖动,用在风机类负载上时甚至会对风机叶片造成损坏。
国内大多数厂家的通用型变频器均采用变压变频调速(VVVF)控制方式,系统带载能力差,启动转矩小,启动电流较大,尤其在低速时,定子电阻压降和逆变器互锁效应加剧,并可能产生振荡和不稳定现象。为了提高恒压频比(V/F)控制的稳定性和动态性能,国内学者进行了很多研究[1]。文献[2]根据电机功率平衡的关系,分析了系统稳态运行时不稳定状态下电机定子电流和输出频率之间的动态关系,提出了一种不依赖电机参数的、基于定子电压矢量定向的稳定性控制方法。文献[2-6]提出通过增加定子电阻压降补偿、滑差补偿和死区补偿来改善V/F的控制性能。
鉴于国内厂家高压通用型变频器多使用V/F控制方式,本文将上述补偿策略引入级联SPWM控制,通过现场变频器与分散控制系统(DCS)自动控制的配合实验,验证本方法的可行性和实用性。
1 V/F控制说明
针对异步电机,为了保证电机磁通和出力不变,电机改变频率时,需维持电压和频率的比率近似不变,所以这种方式称为V/F控制。V/F控制方式控制简单、通用性强、经济性好,可用于速度精度要求不十分严格或负载变动较小的场合。从本质上讲,V/F控制实际上控制的是三相交流电的电压和频率,但交流电除了电压和频率之外,还存在相位。V/F控制没有对电压的相位进行控制,这就导致瞬态变化过程中(如突加负载),电机受冲击后转速下降,但电机供电频率也就是同步转速还是保持不变,这样异步电机会产生瞬时失步,从而引起转矩和转速振荡,经过一段时间后在一个更大的转差下保持平衡。这个瞬态过程中没有对相位进行控制,所以恢复过程较慢,而且电机转速会随负载变化,这就是V/F控制精度不高和响应较慢的原因。
所以,采用V/F控制方式的通用型变频器在负载变动时会出现电流超调的现象:增加负载时,电流会正向过冲,然后慢慢恢复至下一个稳定值;而降低负载时,电流会出现反向过冲。当电厂需要投入自动调节来连续调节机组功率时,变频器的输出电流就会出现连续的波动,在极端情况下,很短的时间内可能出现2个幅值相差很大的电流,这对其拖动的电机影响是很大的,会造成电机和风机的快速老化甚至损坏。
而矢量控制的实质是在三相交流电电压和频率控制的基础上加上了相位控制,这个相位在具体操作中体现为1个角度,简单地讲就是电机定子电流相对于转子的位置角。因此,矢量控制和V/F控制最本质的区别就是加入了电压相位控制。从操作层面上看,矢量控制一般把电流分解成转矩电流和励磁电流,转矩电流和励磁电流的比例是由转子位置角度(也就是定子电压相位)决定的。宏观上看,电机稳定运行时矢量控制和V/F控制的电压、电流、频率相差不大,都是三相对称交流,基本上都满足压频比关系,只是在瞬态过程中(如突加、突减负载)矢量控制会随着速度的变化自动调整所加电压、频率的大小和相位,使这个瞬态过程快速恢复平衡。
鉴于这个原因,对变频器进行矢量控制的升级是很有必要的,但是将通用型变频器升级为矢量变频器,需要增加外围的设施和复杂的控制软件,而且成熟矢量控制多基于有速度传感器的方式,但是速度传感器的安装以及相关硬件的增加是许多用户无法接受的。所以,在现有的V/F控制基础上进行优化,提高系统的性能是极为重要的。
2 补偿策略
2.1 死区补偿说明
高压级联变频器的V/F控制不同于低压变频器V/F控制,控制系统需要输出多路PWM脉冲。为了节省资源,需要在所级联的功率单元中实现上下桥臂脉冲的分离,在脉冲分离的同时完成死区补偿的功能。所以在级联变频器的控制系统中,不考虑死区补偿,这样可以节省一定的资源。
2.2 定子电阻电压补偿方法
补偿定子电阻压降是为了保证低频时依然能获得额定磁通和相应的转矩,防止气隙磁链幅值变小,提高电机负载能力并减小稳态误差。感应电动机非对称T形等效电路如图1所示,图中:V1为定子电压;Vm为励磁绕组两端的电压;Rs为定子电阻;Rr为转子电阻;Lm为励磁电抗;L1δ为定子漏抗;i1为电机电流;iT为转矩电流;iM为励磁电流;s为转差率。

图1 感应电机非对称T形等效电路
励磁绕组两端的电压为
Vm=V1-(Rs+jωeL1δ)i1=V1-
(Rs+jωeL1δ)(isd+jisq) ,
(1)

Vm≈V1-(Rs+jωeL1δ)jisq。
(2)
当负载增加时,s增大,isq保持不变,isd增大,式(3)说明了励磁绕组两端电压改变的趋势。
Vm=V1-(Rs+jωeL1δ)(isd+jisq)=V1-
(Rs+jωeL1δ)jisq-(Rs+jωeL1δ)isd。
(3)
由式(2)、式(3)可以分析得出励磁绕组两端电压的变化量,也就是要保持电机磁链恒定应提升的电压量为(Rs+jωeL1δ)isd。
这里剔除空载时可能出现系统不稳定的情况,那么变频器在带载启动过程中,均可以通过有功电流来实时计算出电压提升量,对定子电阻压降进行补偿以使磁链保持恒定,达到系统平稳穿过低速区的目的。
2.3 滑差补偿方法
大功率高压级联变频器在拖动大型电机时,由于V/F控制调速精度以及负载特性和运行工况,变频器输出电流往往会超过额定电流,甚至出现过载或过流的现象。而大型电机要避免这种现象,电机轴必须在启动时产生一定的电磁转矩,保证电机在带载启动时不会发生堵转[7]。这里可以通过滑差补偿来提升电磁转矩。
按图1中的等效电路可以得出滑差频率计算公式为
(4)
式中:RΓ为转子电阻。从图1可以看出:iT主要作用在阻性负载,而iM主要作用在感性负载上,所以实际计算时可以使用isd,isq来代替iT,iM,滑差频率计算公式可以近似为
(5)
定子矢量与d轴之间的夹角为θ,而旋转矢量角可以通过对V/F控制给定的频率进行积分得出,所以电压矢量角可表示为
(6)
式中:f1为定子电压矢量同步旋转频率;Vsd和Vsq分别为定子电压在q轴和d轴上的分量。由于高压变频器的输入、输出电流为必测参量,所以在不升级硬件的情况下,通过算法更改即可计算得出有功电流和无功电流
(7)
式中:iα,iβ为三相电流,经过Clarke变换后得到。
在文献[4]中通过标量补偿定子电压的幅值,可以较好地抑制过补偿,但是在某些极端的条件下,特别是高压大功率变频场合,由于负载的突升突降,依然会出现电流超调现象。
本文通过无功电流比例积分(PI)控制器来计算Vsq,并通过式(8)来计算Vsd。
(8)
式中:Ve和fe分别为电机的额定电压和额定频率。增加补偿功能的V/F控制框图如图2所示,图2中f*为给定频率。
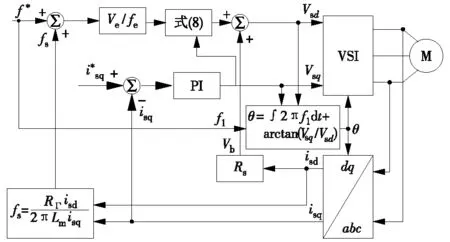
图2 增加补偿功能的V/F控制框图
3 现场运行效果
笔者采取本文设计的V/F控制方法更新了一台风机类负载变频器控制系统。
分别记录了更新前、后变频器的输出电流历史曲线,如图3所示。图3a为控制系统更新前的运行历史趋势,在负载增加过程中,每次调节频率都对应一个大的电流超调波动;图3b为更新后的电流历史曲线,可以看出在负载增加过程中,输出电流平滑上升,没有出现电流超调的现象。对比图3中的电流历史曲线,可以看出补偿V/F控制策略效果明显。
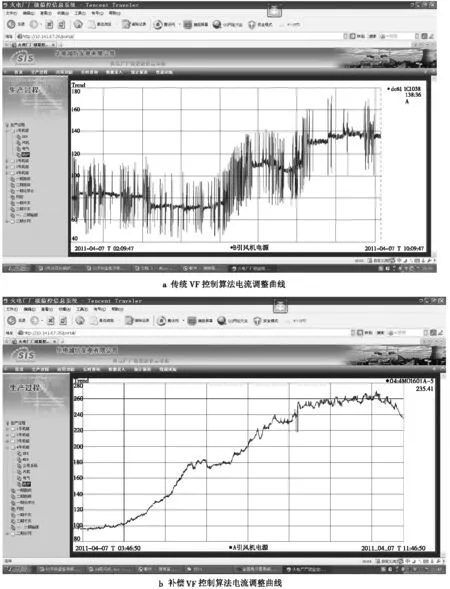
图3 算法更新前、后电流历史曲线
4 结束语
本文将补偿策略引入级联SPWM控制,提高了高压大功率变频器运行的动态性能,有效抑制了负载突变时的电流超调现象。由于该方案中所使用的采样数据在现有的高压大功率变频器主控系统中均能得到,所以算法更新时不需要升级硬件。研究和现场运行效果表明该方法是可行的。
参考文献:
[1]徐殿国.通用变频调速系统若干关键技术综述[J].自动化博览,2008(1):66-70.
[2]王庆义.一种改善VVVF变频调速系统稳定性方法[J]. 电机与控制学报,2007,11(2):138-142.
[3]沈安文.基于补偿策略的通用变频器高性能控制方法研究[J].电气传动,2007,37(1):16-18.
[4]罗慧.基于电流解耦的异步电机V/F控制补偿方法 [J].华中科技大学学报:自然科学版,2007,35(10):60-63.
[5]陈伟.新型感应电机V/F控制系统稳定性方法[J]. 电机与控制学报,2009(s1):11-14.
[6]陈伟. 具有低速高性能的电压定向V/F控制方法[J].电机与控制学报,2010,14(1):7-11.
[7]孟彦京,许德玉,高承雍.转矩补偿和滑差补偿的区别与应用[J].电气传动,2002,32(4):17-19.
猜你喜欢
中国特种设备安全(2022年1期)2022-04-26
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
铁道通信信号(2018年2期)2018-04-18
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
中国交通信息化(2015年7期)2015-06-06
