
Application of RLS adaptive filtering in signal de-noising
2014-09-07 03:23CHENGXuezhenXUJingdongWEIyingPANGMingxiang
CHENG Xue-zhen, XU Jing-dong, WEI A-ying, PANG Ming-xiang
(College of Information and Electrical Engineering, Shandong University of Science and Technology, Qingdao 266590, China)
The key of adaptive de-noising is an adaptive filter.The performance of many signals and noises are unpredictable or varies with time.An adaptive filter is capable of adjusting filter coefficients by use of related adaptive filtering algorithms so that characteristics of the filter can achieve self-adjustment along with changes of signals and noises; therefore, an optimal effect can be achieved[1,2].The adaptive filter mainly comprises two parts: the structure of the filter and the adaptive algorithm used for adjusting the coefficients of the filter[3].There are a great variety of adaptive algorithms wherein two of them are the classic algorithms: least mean square (LMS) and the recursive least squares (RLS).LMS algorithm is simple in structure, small in amount of calculation and slow in convergence rate[4,5].By con-trast, for RLS algorithm, exponential weighting is adopted in evaluated errors, the convergence is independent of the frequency spectrum characteristics of input signals, and the convergence rate is relatively fast[6-8].Therefore, considering the signal de-noising system in the paper, the adaptive filtering based on RLS algorithm is chosen.
1 Adaptive filtering based on RLS algorithm
The adaptive filter has relatively good filtering performance, in that statistical property estimation of the input and output signals is introduced as the basis and specific algorithms are adopted to automatically adjust the coefficients of the filter.Based on this, an algorithm capable of achieving the optimal filtering characteristics can be realized.Thus the adaptive filter is provided with tracking ability[9].Weighting coefficient of every sample value of the input signal sequenceu(n) is updated and adjusted according to specific algorithms by the adaptive filter.By comparing the output signal sequencey(n) with the anticipated output signal sequenced(n), an error signalξ(n) is obtained.The coefficients of the filter are regulated byξ(n) andu(n) through the adaptive algorithm, and aim of the adjustment is to minimize the error signalξ(n)[10,11].The function block diagram of RLS algorithm is shown in Fig.1.
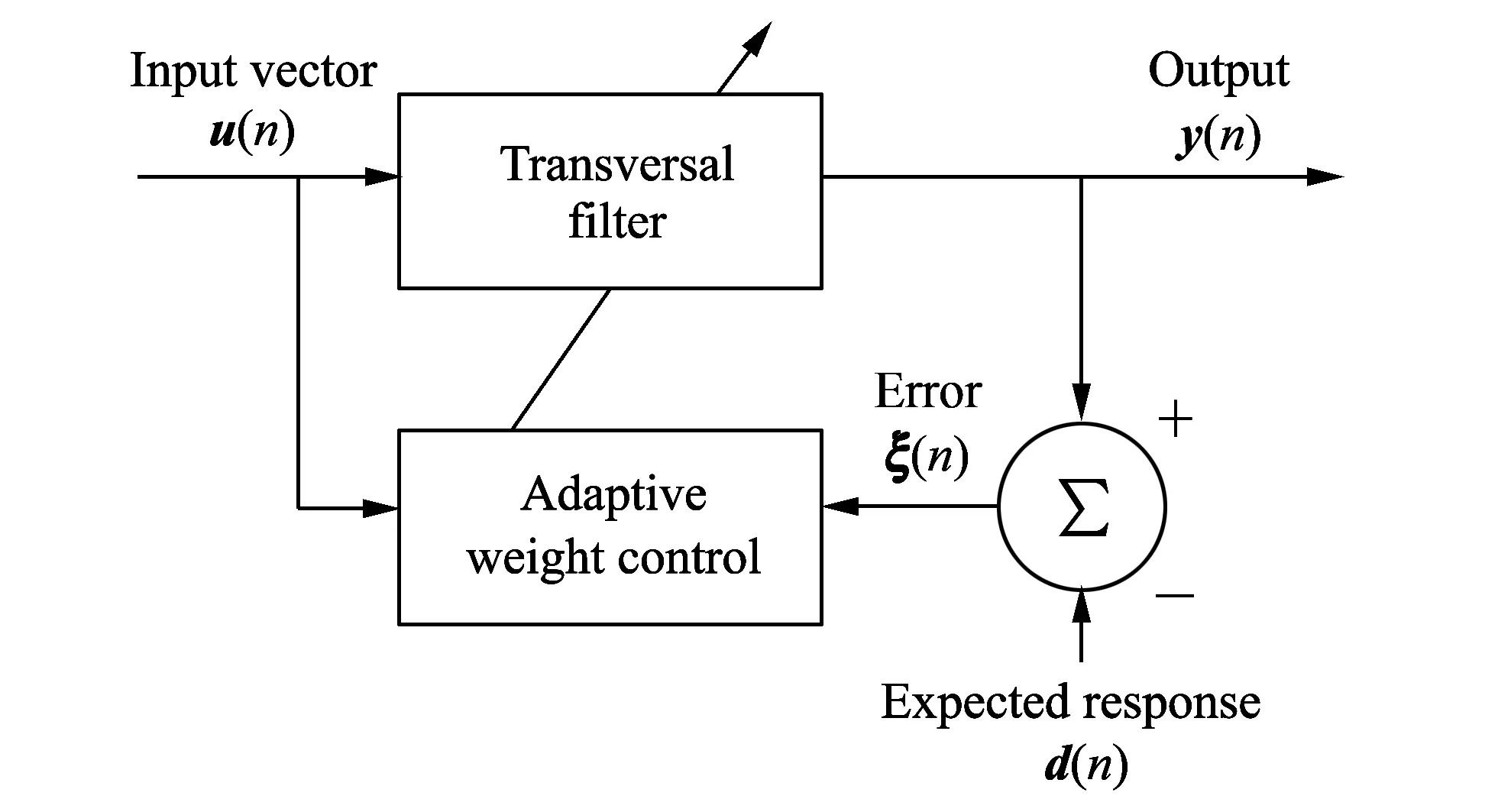
Fig.1 Function block diagram of RLS algorithm
Adaptive filtering based on RLS algorithm is that the least square estimation of filter weight vector withn-1 iterations is given.Then the newest estimation of then-iteration weight vector is calculated according to the obtained data.Square mean minimization norm is adopted in RLS algorithm, so the square sum of errors is minimized[12,13].The signal flow chart of RLS algorithm is shown in Fig.2.
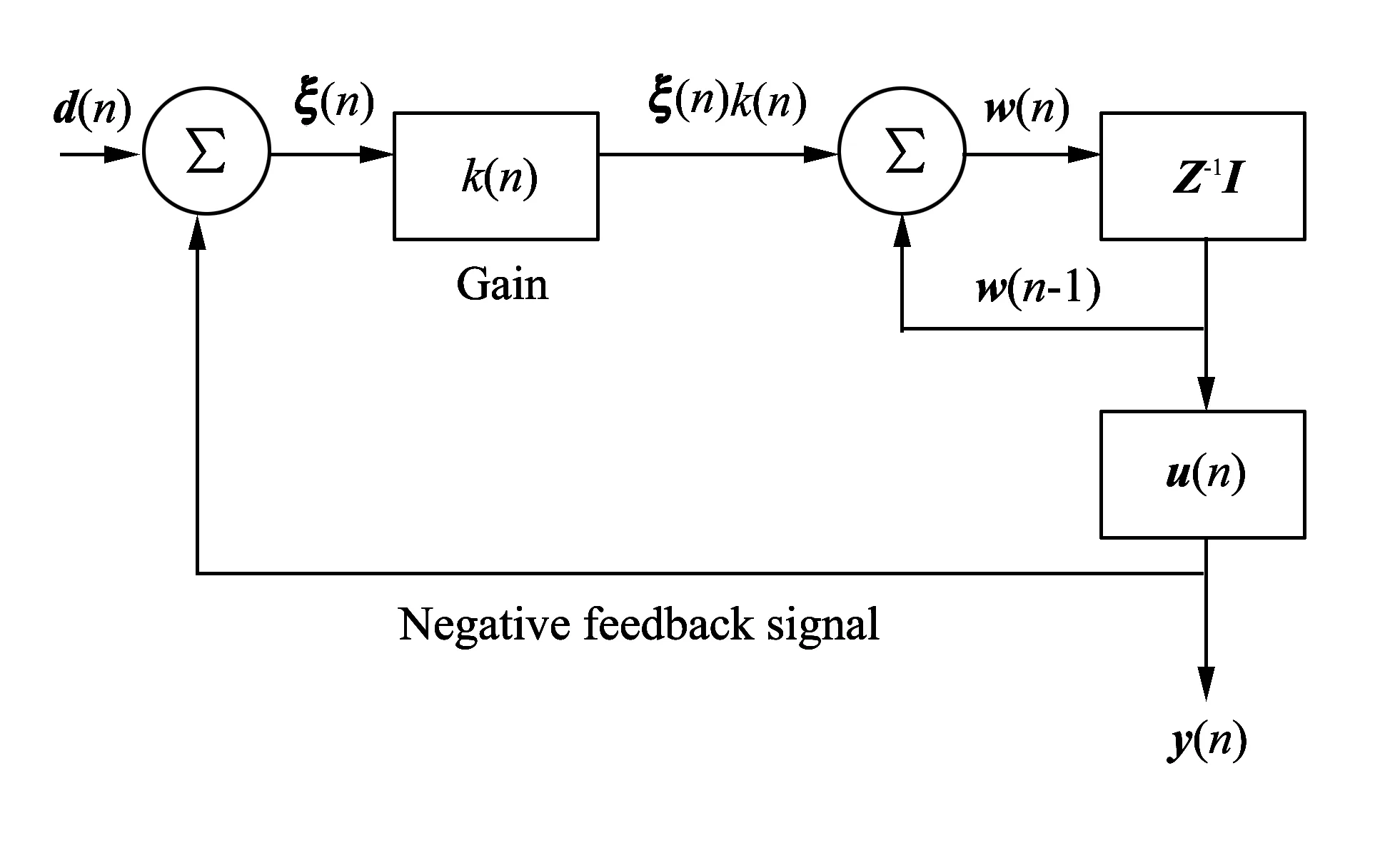
Fig.2 Signal flow chart of RLS algorithm
The design process of RLS algorithm is as follows[14]:
1) Initialization:
w(0)=0,P(0)=δ-1I;
2) Do iterative calculations tontimes (n=1, 2, …)
Filter output:
y(n)=wT(n-1)u(n).
(1)
Error estimation:
ξ(n)=d(n)-y(n).
(2)
Updating the gain:
(3)
Updating weight vector:
w(n)=w(n-1)+k(n)ξ(n).
(4)
Update the inverse matrix:
P(n)=λ-1p(n-1)-λ-1k(n)uT(n)P(n-1),
(5)
whereu(n) is the input vector;ξ(n) is the prior estimated error;k(n) is the gain vector,w(n) is the weight coefficient vector of the adaptive filter at then-th time (n=1,2,…),P(n) is the inverse matrix of the signal correlation matrix, the initial value ofP(n) isP(0)=δ-1I(δis a very little positive number,Iis a unit vector),d(n) is the anticipated output, and 0<λ<1 is the weighting factor.
The gain vector can be updated by Eq.(3) and Eq.(5), and the filtering process of this algorithm is described in Eq.(2) while the prior estimated errorξ(n) can be calculated, and the adaptive process of this algorithm is described in Eq.(4).A vector can be added on the prior basis to carry out recursion of weight vector which is equal to product of the prior estimated errorξ(n) complex conjugate and the variable gain vectork(n).
2 Hardware design
Hardware structure of the system is shown in Fig.3 and mainly consists of two parts: signal collection and digital signal processor (DSP).
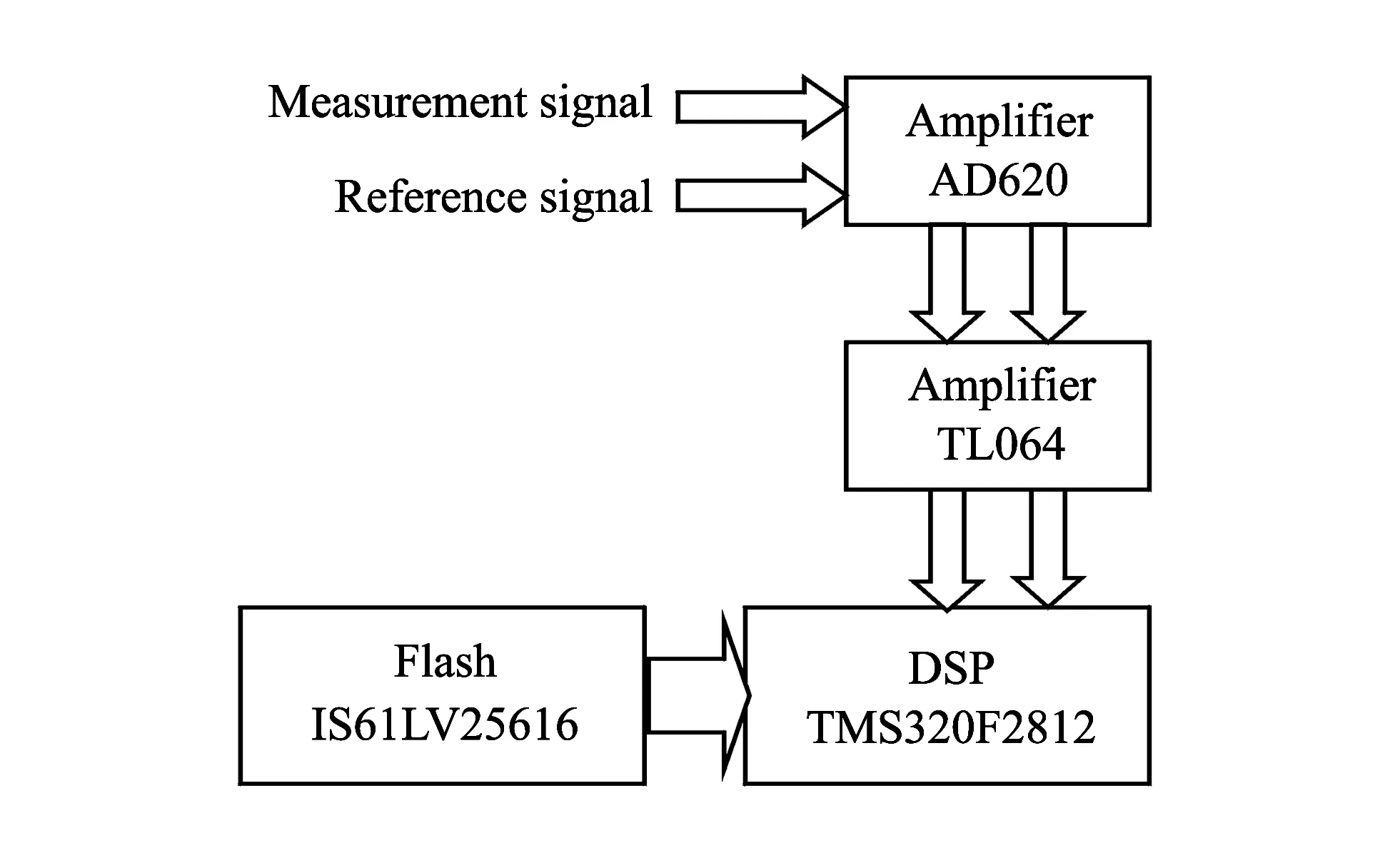
Fig.3 Block diagram of system hardware
With regard to data collection of the signals, amplifier AD620 is adopted in the first level of this system.In order to enhance anti-interference ability in the process of the signal transmission, the mode of two-level amplification is adopted.TL064 chip is used for the second level amplification circuit, thus the signal can be amplifed.
DSP chip is adopted to achieve adaptive filtering.Due to the fact that DSP chip is provided with Harvard architecture, assembly line operation, special hardware multiplying units, short instruction period and the like, DSP chip is suitable for complex digital signal processing algorithms.In this system, TMS320F2812 is adopted as the processor with the highest frequency of 150 MHz and instruction period of 6.67 ns.And 16-channel 12-bit analog-to-digital converter (ADC) is integrated in TMS320F2812, where a two-channel sampling holder is provided and double-channel synchronous sampling can be achieved.The minimized transmission time is 80 ns[15].The processor is connected with the external amplifiers through ADC, while the collected signals are transferred to the digital signals, and the processing of RLS adaptive filtering is carried out.To improve the processing speed of DSP, extended external Flash memory of 256 MB is adopted.
3 Software design
Program flow chart of RLS adaptive filtering system is shown in Fig.4.

Fig.4 Program flow chart
The whole process is mainly divided into four steps:
1) Data collection and generation,d(n) andu(n) are acquired;
2) Initialization of parameters;
3) Adaptive filtering processing;
4) Update of the filter coefficients.
4 Simulation experiment
The voice signal is used as the experimental object to be simulated by Matlab.In order to better verify the filtering performance of RLS adaptive filtering algorithm, the simulation experiments of RLS algorithm and LMS algorithm for the same voice signal are conducted, respectively.In addition, the results of comparison and analysis are presented in the following.
Fig.5 is the original voice signal and Fig.6 is the voice signal mixed with Gaussian white noise.Fig.7 and Fig.8 are the signals drawn by RLS algorithm and LMS algorithm, respectively.
It can be seen from Figs.7 and 8 that the voice signal drawn by RLS algorithm is relatively good in filtering effect and low in distortion rate.By contrast, for the signal drawn by LMS algorithm, the filtering effect is relatively poor and distortion rate is high, because random noise parts are not filtered and relatively large.
Fig.5 Original voice signal
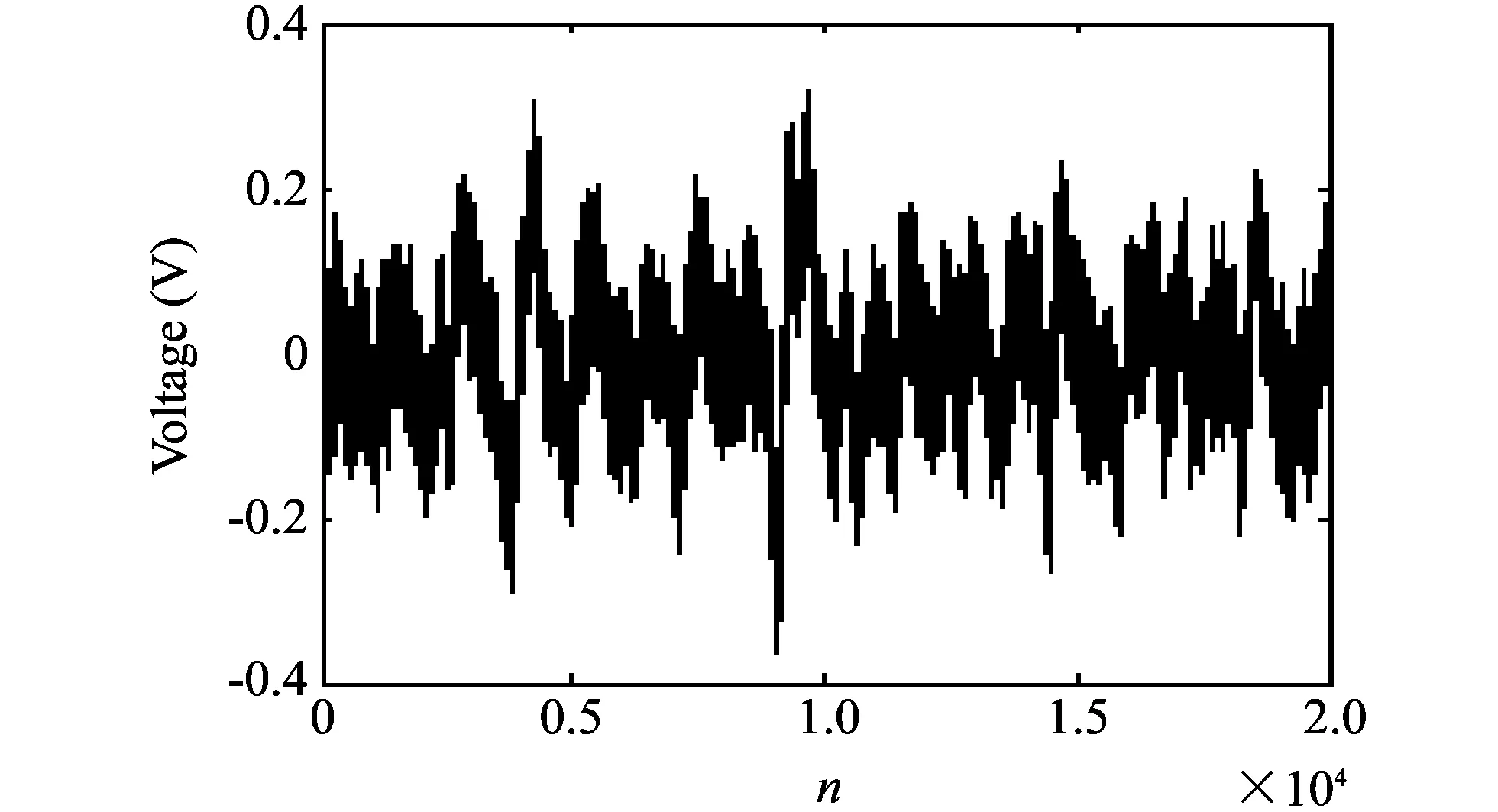
Fig.6 Signal mixed with Gaussian white noise
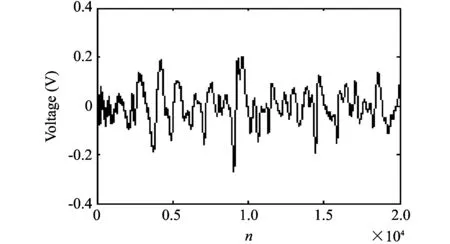
Fig.7 Signal drawn by RLS algorithm
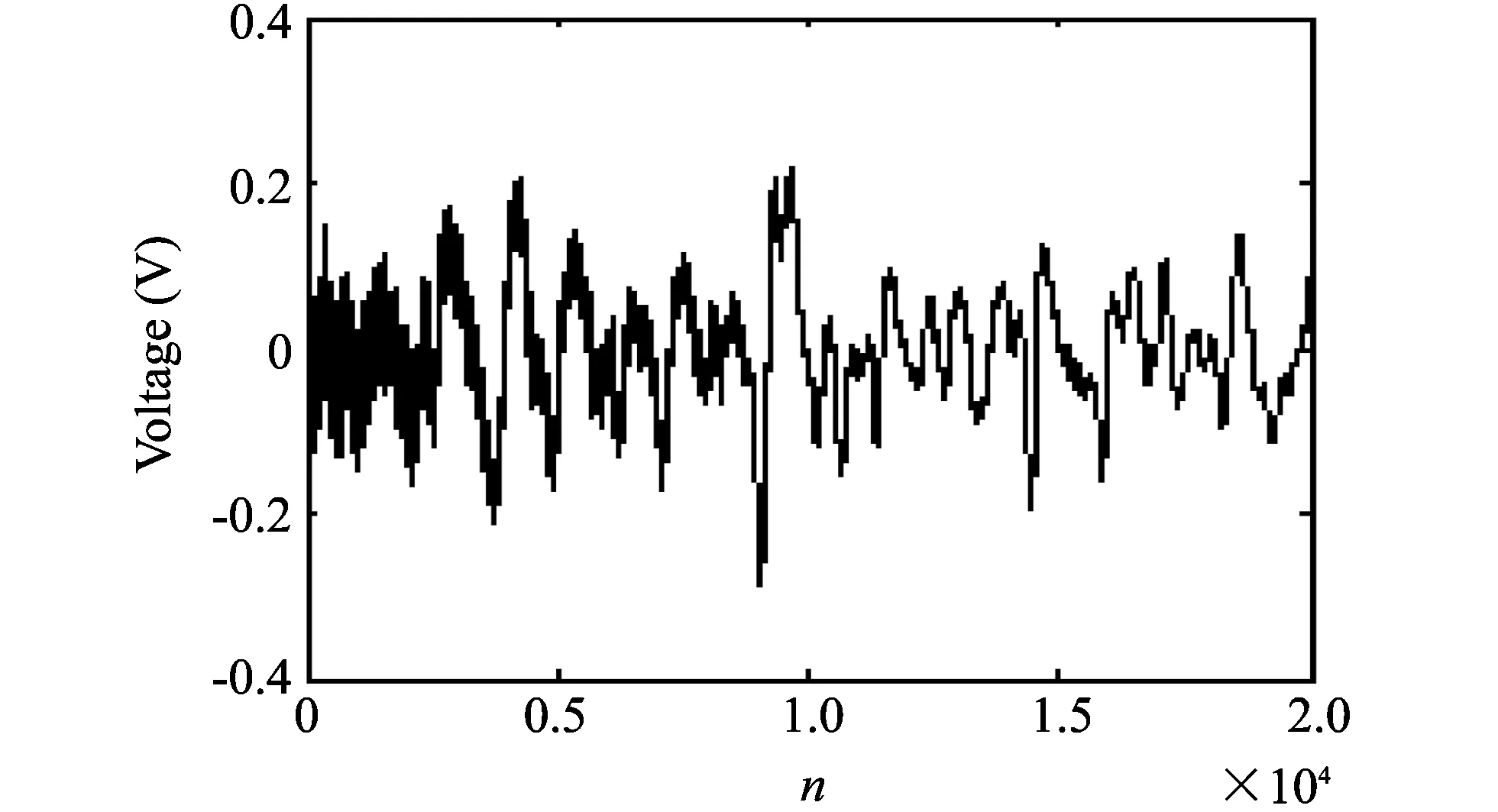
Fig.8 Signal drawn by LMS algorithm
Figs.9 and 10 are error curves of RLS algorithm and RLMS algorithm, respectively.
It can be seen that, for the signal drawn by RLS algorithm, the convergence rate is fast estimated, precision is high and stability is good.By contrast, LMS algorithm is slow in convergence rate, low in estimated precision and poor in stability.Therefore, the adaptive filtering based on RLS algorithm can effectively filter the interference noises and obtain useful signals.
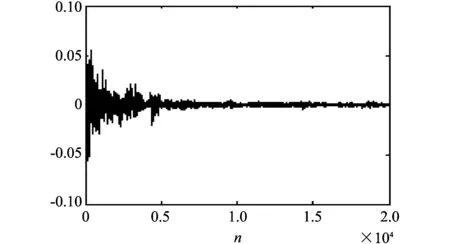
Fig.9 Error curve with RLS algorithm
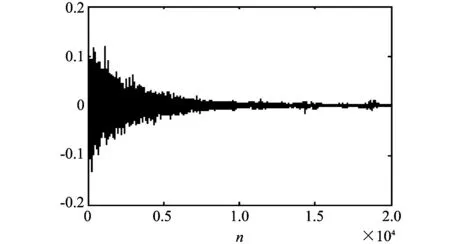
Fig.10 Error curve with LMS algorithm
5 Conclusion
Based on RLS adaptive filtering algorithm, a signal de-noising system is designed, a signal collection and filtering platform is established with DSP as its core and Matlab simulation is also conducted.According to simulation results, it can be seen that the convergence speed of RLS algorithm is faster than that of LMS algorithm.RLS adaptive filtering algorithm can eliminate the noises added on the signals in a relatively good manner and draw the useful signal with low distortion rate.Therefore, the feasibility of RLS algorithm is verified.
[1] REN Xiao-ya, SONG Ai-min.Comparison of adaptive filtering algorithms used in interference cancellation system.Communications Technology, 2007, 40(12): 48.
[2] LIU Shi-jin, ZHAOG Yu-feng, CHEN Wen-lüe, et al.Comparison of adaptive filtering algorithms in noise cancellation application: a simulation study.Journal of System Simulation, 2006, 18(5): 1178-1179.
[3] WANG Lu-bin, ZHAI Jing-chun, XIONG Hua.Adaptive filter algorithm research and Matlab realization.Modern Electronics Technique, 2008, 31(3): 174-175.
[4] Ogunfunmi T, Paul T.Analysis of convergence of a frequency-domain LMS adaptive filter implemented as a multi-stage adaptive filter.Journal of Signal Processing Systems, 2009,56(2/3): 341-350.
[5] SONG Hui, LIU Jia.Research on adaptive speech enhancement algorithm based on differential microqhone array and its implementation with DSP.Acta Automatica Sinica, 2009, 35(9): 1240-1241.
[6] WU Qi-hui, WANG Jin-long, SHEN Liang, et al.Robust RLS algorithm for adaptive arrays.Acta Electronica Sinica, 2002, 30(6): 893-894.
[7] Antunovi M, Cummer S A.Adaptive filter for event-based signal extraction.Automatika: Journal for Control, Measurement, Electronics, Computing and Communications, 2004, 45(3): 130-132.
[8] GAO Li-jun, Parhi K K, MA Jun.Relaxed annihilation-reordering look-ahead QRD-RLS adaptive filters.Journal of VLSI Signal Processing, 2003, 35(2): 119-120.
[9] Lotfizad M, Yazdi H S.Modified clipped LMS algorithm.EURASIP Journal on Advances in Signal Processing, 2005(8): 1229-1230.
[10] SONG Li-ye, WANG Jing-sheng, PENG Ji-sheng.Algorithm research of adaptive filter and DSP simulation realization.Modern Electronic Technique, 2009, 32(5): 112-113.
[11] GAO Ying, XIE Sheng-li.An adaptive filtering algorithm based on recursion of generalized inverse matrix.Acta Electronica Sinica, 2002, 30(7): 1032-1033.
[12] Chang D C, Chiu H C.A stabilized multichannel fast RLS algorithm for adaptive transmultiplexer receivers.Circuits, Systems and Signal Processing, 2009, 28(6): 845-859.
[13] JIANG Xiao-hua, JIN Ji, Emedi A.Adaptive fundamental component detection approach to power harmonic compensation based on the RLS algorithm.Chinese Journal of Scientific Instrument, 2006, 27(1): 1-3.
[14] MIAO Hao, Deuflhard P, SUN Zeng-qi, et al.Model-free uncalibrated visual servoing using recursive least squares.Journal of Computers, 2008, 3(11): 42-43.
[15] XU Pei.Research on a high performance control system based on TMS320F2812.Aeronautical Computing Technique, 2007, 37(5): 86-87.
 Journal of Measurement Science and Instrumentation2014年1期
Journal of Measurement Science and Instrumentation2014年1期
- Journal of Measurement Science and Instrumentation的其它文章
- Error separation in CMM coordinate metrology
- Design and theoretical analysis of test system for propellants’ gas pressure in warhead
- A new probe for atmospheric electric field mill
- Experimental analysis of high temperature capacitance variance of MLCC
- QIM digital watermarking based on LDPC code and message passing under scaling attacks
- Energy-aware cooperative spectrum sensing for underground cognitive sensor networks