基于线控4WS车身稳定控制系统的设计
2014-08-21 02:42:20顾国磊
哈尔滨商业大学学报(自然科学版) 2014年4期
刘 超,何 平,顾国磊,李 莹
(哈尔滨工业大学航天学院控制科学与工程系,哈尔滨150001)
随着现代汽车技术的不断深入发展,我国已经进入汽车高速化、密集化的时代,对汽车的主动安全性能提出了更加高的要求.汽车主动安全性能中最重要的是操纵稳定性,改善汽车的操纵稳定性以提高汽车的安全性能能为目前车辆动力学及控制领域研究的重要方向[1].
在国外,很多著名研究所、高校和大公司多年前就已经开展过很多有关汽车四轮转向的研发.国内的有关汽车主动四轮转向的研究相比较国外而言起步晚,发展缓慢,有待改进,仍滞留在理论研究与探讨阶段,并没有得到广泛的应用[2].
本文基于TMS320F2812设计了4WS车身稳定控制系统,以达到汽车质心侧偏角基本为零的控制目标.线控4WS是以电信号的形式由网络传递给电子控制器与执行机构操纵前、后轮的主动转向控制技术,是一种有效改善车辆操纵稳定性的安全技术[3].该系统利用各传感器采集的数据,如前后轮转角传感器等,在相应的控制算法下,控制电机转动,使汽车转向传动机构按照预定逻辑进行运动,从而实现对转向操纵稳定性的改善.
1 系统的原理及方案设计
线控主动四轮转向系统结构图如图1所示.
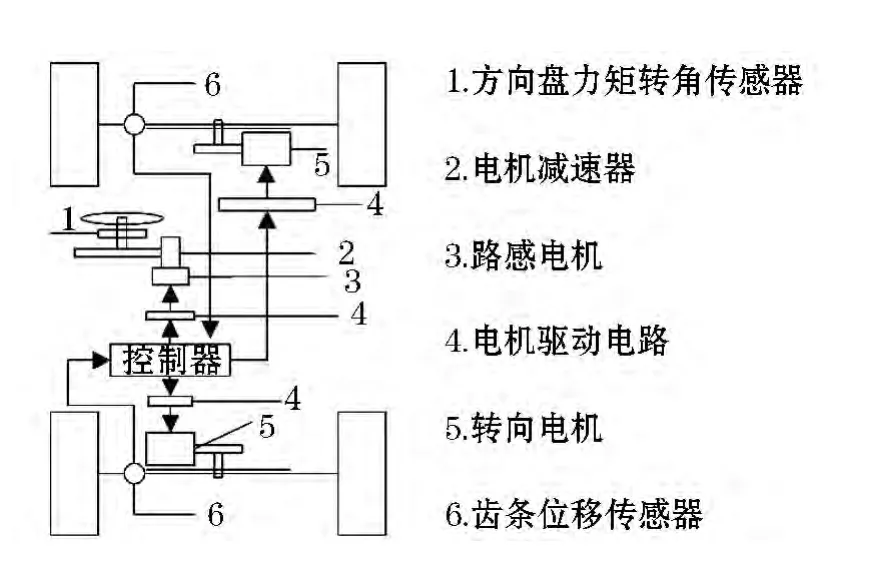
图1 线控主动四轮转向系统结构
从结构形式上看,可将转向系统分为:前馈型四轮转向系统、反馈型后轮主动转向系统和主动四轮转向系统.对于线控转向系统,方向 盘与前后轮没有任何机械连接,通过方向盘转角传感器获取转向指令,以电信号的形式通过CAN总线等总线网络传递给电子控制器,再由控制器结合各传感器反馈的数据,在设定的控制算法的作用下,计算出合适的控制量来驱动电机,以达到保持汽车的质心侧偏角基本为零的目标.汽车的质心侧偏角是指汽车纵向与运动方向,即汽车旋转圆切线之夹角,是衡量汽车操纵稳定性的重要指标[4].
2 总体结构设计
系统主要由操作台、主控系统和机电部分三部分组成.系统的总体结构如图2所示.

图2 车身稳定控制系统的总体结构框图
车身稳定控制系统的操作台,即上位机,是整个系统的监控平台,采用工控机来实现,为测试系统提供友好的人机交互界面,通过设定参数、测量数据和分析数据,得到汽车的质心侧偏角、车速、前后轮转角和角速度等参数.
车身稳定控制系统的主控系统,即下位机,是整个系统的控制核心,根据用户的给定命令值,结合各传感器反馈的数据,按照设定算法,测量车速传感器、前后轮转角角度传感器以及角速度传感器的输出值的变化,并将所得数据发送至操作台,由上位机计算得各参数.
车身稳定控制系统的机电部分,其中包括传感器和电机等,车辆执行机构被固定在测试台上进行各参数的测试,通过系统的主控电路与上位机进行实时通信.
3 系统控制电路的实现
系统的控制电路结构框图如图3所示.
3.1 系统主控制器单元
系统采用TI公司的TMS320F2812作为主控芯片,它具有强大的数字信号处理能力,片内集成了丰富的外设资源,为车身稳定控制系统的参数测量提供了极大的便利.考虑芯片的最小系统配置,该单元主要由以下几个模块组成:电源模块、JTAG模块、时钟模块、复位模块、晶振模块等[5].
3.2 RAM存储器的扩展模块
由于主控芯片内部RAM容量有限,因此本主控系统对F2812进行了RAM存储器的片外扩展.本主控系统采用IS61LV12816作为片外RAM扩展芯片,它是一种高速的静态RAM,有17根地址总线,16根数据总线,其存储空间为128 K×16 bit,由3.3 V电源直接供电,同时兼容TTL与CMOS电平,无时钟或刷新.
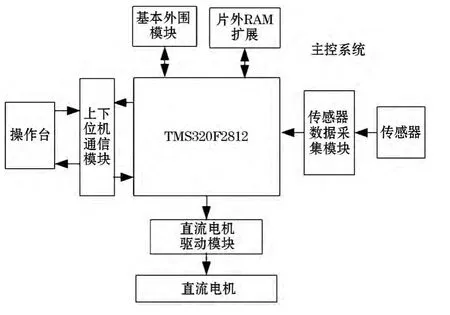
图3 系统的控制电路结构框图
3.3 直流电机驱动模块
为了控制直流电动机按照所设定的命令及相关的逻辑进行运动,车身稳定控制系统的主控系统设计了一直流电机驱动模块,直流电机驱动器选用多功能直流伺服驱动器.
选用TI公司生产的数模转换芯片DAC7731作为本主控系统直流电机驱动模块的转换单元,DAC7731是一个16位数字模拟转换器,能够提供可配置的电压输出范围,转换速率高,功耗低,特别适合于工业控制领域[6].
3.4 传感器数据采集模块
为了采集各传感器的测量值,如角度传感器、车速传感器等,设计了一传感器数据采集模块,采用AD7606作为采集传感器所测的电压值的模数转换芯片,它能将各传感器所测电压量转换为对应数字量,AD7606采用过采样技术,可达到16位精度,提高了模数转换精度,同时,AD7606采用2.5V基准电压源,并含有基准电压缓冲,采样电路的可靠性高.另外,AD7606同时拥有串行接口和并行接口,方便设计者进行电路设计[7].
3.5 通信单元
主控系统的通信单元主要用于控制电路和计算机之间的通信.系统以MAX3232为核心器件设计了RS232通信单元,方便主控系统与操作台进行数据交换.
4 软件算法的实现
系统的控制电路的软件部分运行于TMS320F2812中,软件开发平台为CCS3.3.程序主要以C语言完成[8-9],CCS是德州仪器公司所设计的一款针对DSP和部分ARM的开发软件,本设计使用该编程开发环境下的CCS3.3版本对主控系统的开发.CCS3.3功能十分强大,用户通过CCS3.3能够对各类项目文件进行管理并进行程序编写、在线编译、调试等,其工作流程图如图4所示.
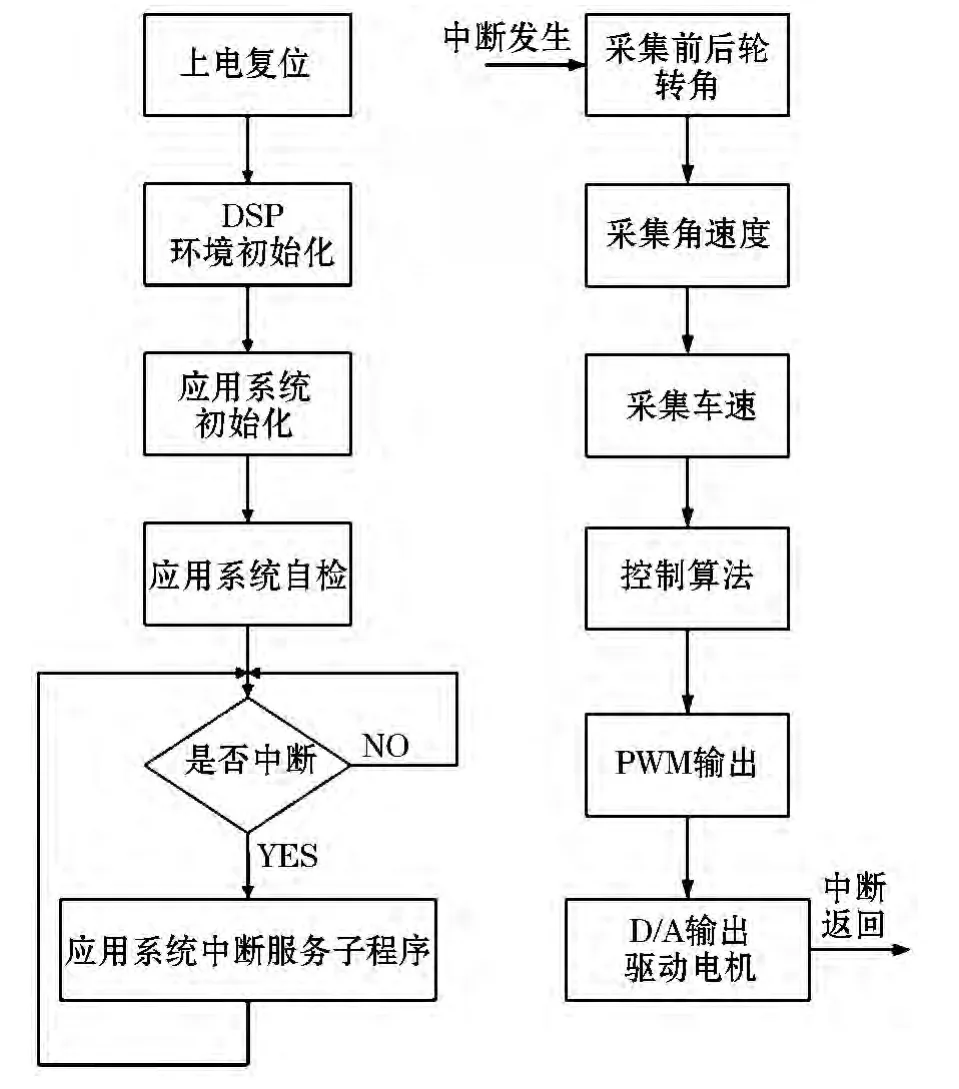
图4 系统软件算法流程图
5 实验结果
车身稳定控制系统通过前馈反馈结合的控制策略实现了质心侧偏角基本为零的控制目标,所得数据经过分析处理,绘制出相应测试结果曲线,如图5所示.

图5 质心侧偏角测试曲线
6 结语
本文设计的线控4WS车身稳定控制系统,运用DSP技术实现了汽车质心侧偏角基本为零的目标.实验结果表明,该系统能够在转向过程快速地做出响应,经济实用,明显提高汽车的机动灵活性,改善了汽车的操纵稳定性,具有很高的实用价值,对于现代汽车技术的研究与发展具有非常重要的意义.
[1]施国标,于蕾艳,林 逸.四轮线控转向横摆角速度反馈控制策略研究[J].系统仿真学报,2008,20(2):506-508.
[2]汪东明.4WS汽车的硬件设计及操纵稳定性控制[D].南京:东南大学,2005:27-37.
[3]常 胜,许洪国,刘宏飞.四轮转向半挂汽车列车行驶稳定性仿真研究[J].计算机仿真,2009,26(11):235-238.
[4]邓 涛,孙冬野,秦大同,等.重型车辆AMT硬件在环仿真试验研究[J].中国机械工程,2010,21(2):245-251.
[5][美]Texas Instruments Incorporated.TMS320C28X 系列 DSP的CPU与外设(上)[M].张卫宁,译.北京:清华大学出版社,2005:12-30.
[6]高建军,冷 岩.传动装置回差的测量与数据处理[J].机电技术,2007(3):38-41.
[7]任明荣.基于FPGA的高精度A/D采样实现[J].科技创新导报,2010(14):49-51.
[8]孙丽明.TMS320F2812原理及其C语言程序开发[M].北京:清华大学出版社,2008:15-19.
[9]王成文,谷吉海,宠 明,等.商用车驾驶室振动测试试验研究[J].哈尔滨商业大学学报:自然科学版,2012,28(5):591-595.
猜你喜欢
无人机(2024年11期)2024-03-01 00:00:00
汽车纵横(2022年10期)2022-10-28 03:16:12
汽车纵横(2022年9期)2022-09-15 05:26:58
民用飞机设计与研究(2020年4期)2021-01-21 09:15:46
新课程·中学(2019年7期)2019-09-17 13:41:15
汽车维护与修理(2019年3期)2019-08-08 02:29:10
汽车维护与修理(2018年5期)2018-09-29 02:41:46
电子制作(2018年9期)2018-08-04 03:31:12
汽车维护与修理(2018年23期)2018-07-03 07:10:10
物理教学探讨(2018年1期)2018-02-13 09:26:52