
基于模型开发方法的电动汽车永磁同步电机矢量控制算法研究与应用*
2014-08-08 03:17:08黄智宇鲜知良李景俊尤云功
电机与控制应用 2014年6期
黄智宇, 鲜知良, 李景俊, 尤云功
(1. 重庆邮电大学 自动化学院,重庆 400065; 2. 重庆高校汽车电子与嵌入式 系统工程研究中心,重庆 400065)
0 引 言
当今世界,环境和能源问题越来越受到国际社会的重视,电动汽车以其清洁、高效和安全成为世界各国的研究热点。电动汽车的主要技术分为: 底盘和车身技术、能源技术以及驱动技术,其中以驱动技术尤为复杂[1]。电动汽车要求驱动电机具有能够频繁起动/停车、加速/减速,过载能力强,调速范围大,既要能运行在恒转矩区,又要能运行在恒功率区。永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)因其具有功率密度高、效率高等一系列优点,多被各整车厂商选作驱动电机[2,3]。
永磁同步电机控制技术主要分为矢量控制(Field Orientation Control, FOC)技术和直接转矩控制(Direct Torque Control, DTC)技术[4-6]。DTC虽然具有瞬态响应良好、受电机参数变化影响小等优点,但其起动和低速性能差,电流和转矩有很大的脉动。FOC具有良好的中、低速性能,虽然其转速及扭矩的瞬态响应较慢,但其目标转速和扭矩的响应时间可以通过算法改进,在文献[7-11]中有详细研究。本文采用FOC作为永磁同步电机的控制算法。
随着汽车电子软件的日益增多,其开发过程也变得更复杂,很难形成统一的开发流程,对驱动电机控制软件的开发亦是如此,这导致电机控制软件的开发周期长、开发效率低。为了提高电机控制软件的开发效率,把对电机软件的开发集中在控制算法上。本文采用基于模型的开发方法[12],结合模型的实时开发环境,实现FOC算法设计、模型搭建、代码生成和硬件调试的快速一体式开发。
1 PMSM数学模型及FOC算法
1.1 PMSM的数学模型
由于PMSM是一个多变量、强耦合的复杂系统,为了更好地分析和简化研究,在讨论PMSM的多变量数学模型时,常作以下假设[13]:
(1) 忽略空间谐波和漏磁通的影响;
(2) 忽略磁路饱和,各绕组的自感和互感都是线性的;
(3) 忽略铁心损耗和饱和,默认永磁材料电导率为零;
(4) 不考虑频率和温度变化对绕组电阻的影响,定子各相绕组参数一致;
(5) 永磁体转子磁链幅值恒定,气隙在空间磁场呈正弦分布。
在dq坐标系下,PMSM的数学模型为[14]
(1)
式中:ud、uq——定子的d、q轴电压;
id、iq——定子的d、q轴电流;
Ld、Lq——d、q轴电感;
Rs——定子电阻;
ω——转子角速度;
ψf——磁链;
np——磁极对数;
TL——负载扭矩;
B——粘滞系数;
J——转动惯量。
永磁同步电机的电磁转矩方程为
Te=3np[Ψfiq+(Ld-Lq)idiq]/2
(2)
本文试验中的电动汽车驱动电机为表面式永磁同步电机,其d轴和q轴电感相等,故得到简化的电磁转矩方程为
Te=3npΨfiq/2
(3)
由式(3)可知,通过控制iq电流即可控制永磁同步电机的电磁转矩,能够实现如同直流电机的控制,具有很好的解耦特性。
1.2 FOC算法
通过坐标变换,FOC算法将PMSM的定子电流分解到转子同步旋转坐标系中,把定子电流分为励磁电流分量id(直轴电流分量)和转矩电流分量iq(交轴电流分量),对两个分量分别加以控制,从而获得很好的解耦特性。PMSM的FOC框图如图1所示。
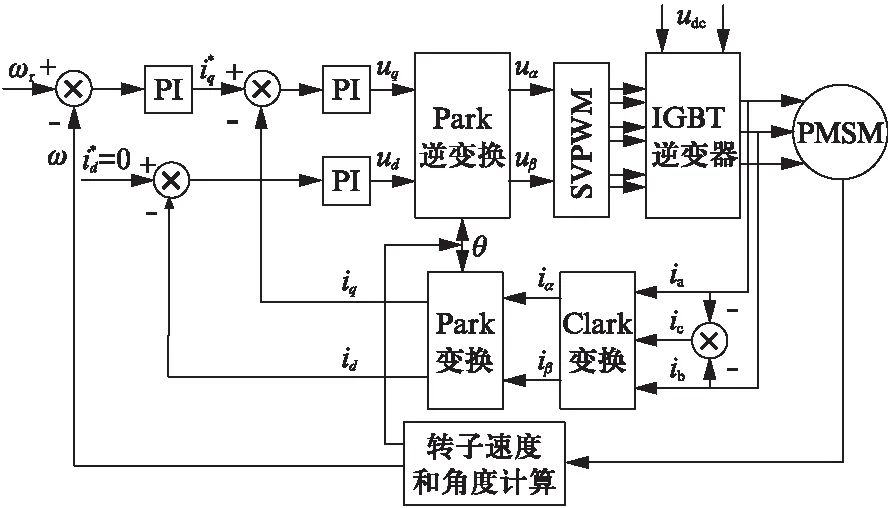
图1 PMSM的FOC框图
2 基于模型的FOC设计
基于模型的设计,是以实时软件为开发平台,实现快速的算法建模、微控制器驱动集成、代码自动生成、软件/处理器/硬件在环测试等[15]。
本文以MATLAB与CCS IDE为软件平台,具体的实现过程分: FOC算法设计、FOC子系统代码生成与测试、集成微控制器及外设驱动、集成任务调度、整个模型自动代码生成与优化。
2.1 FOC算法设计
FOC算法难点是SVPWM模块设计,其以三相对称电动机定子理想磁链圆为参考标准,对三相逆变器不同开关模式作适当的切换,从而形成PWM波形,以所形成的磁链矢量来追踪其准确磁链圆。三相逆变器由三组半桥,6个开关组成。依次定义逆变器的8种工作状态:v0=[000],v1=[001],v2=[010],v3=[011],v4=[100],v5=[101],v6=[110],v7=[111],作为基本电压矢量,把空间均分为6个扇区,来合成空间电压矢量。逆变器开关状态为[001]如图2所示。空间电压矢量分布如图3所示。
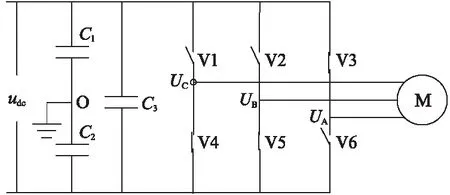
图2 逆变器开关状态为[001]
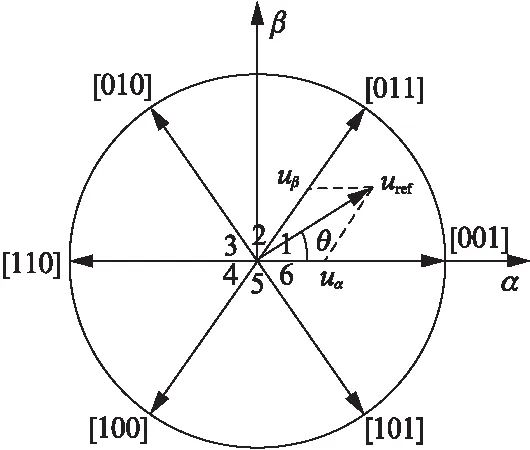
图3 空间电压矢量分布
为了减少逆变器开关切换次数,达到减小开关损耗的目的,本文设计7段式SVPWM,将基本电压矢量作用时间顺序选定为: 在每次开关状态转换时,只改变其中一个逆变桥的开关状态,以 Ⅰ 扇区(0°≤θ≤60°)为例,空间电压矢量uref由基本电压矢量v1,v3合成,设定v1,v3的作用时间分别为T1、T3,零矢量的作用时间分别为T0、T7,PWM周期为Ts。在一个PWM周期内,逆变器的开关切换顺序为: 0-1-3-7-7-3-1-0,基本电压矢量在一个PWM周期内开关切换顺序如图4所示。

图4 Ⅰ扇区一个周期内开关切换顺序
具体的SVPWM实现方式可分为: 确定合成电压矢量uref所处扇区和计算基本电压矢量作用时间。
(1) 确定合成电压矢量uref所处扇区。
由图1可知,uα,uβ作为逆变器的输入,来合成电压矢量uref,假定合成电压矢量uref落在第Ⅰ扇区,由图3可知其等价条件: 0°< arctan(uβ/uα)<60°。同理,可以判断出合成电压矢量uref落在第x扇区的充要条件。空间电压矢量所在扇区判断如表1所示。
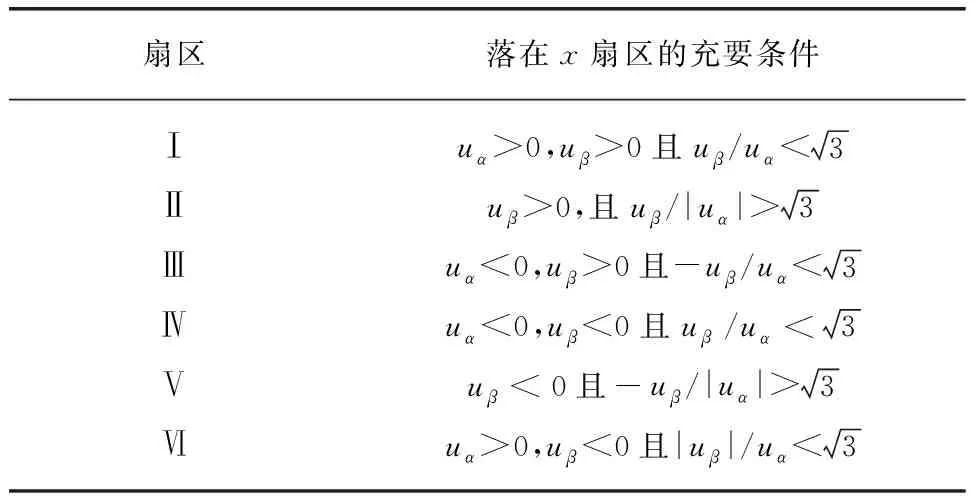
表1 空间电压矢量所在扇区判断
(2) 计算基本电压矢量作用时间。
以第Ⅰ扇区空间电压矢量uref为例,设定其相邻基本电压作用时间分别为T1、T3,零矢量的作用时间分别为T0、T7,PWM周期为Ts,θ为uref与v1之间的夹角,如图3所示。由伏秒平衡法得
(4)
解得
(5)
(6)
(7)
同理,可求得uref在其他扇区中各基本电压矢量的作用时间。应注意在合成某空间电压矢量时,相邻基本电压矢量作用时间的计算,以免发生过调制。相邻基本电压矢量作用时间的计算流程图如图5所示,其中,Tk、Tk+1分别为相邻电压矢量的作用时间,Ts为PWM周期。
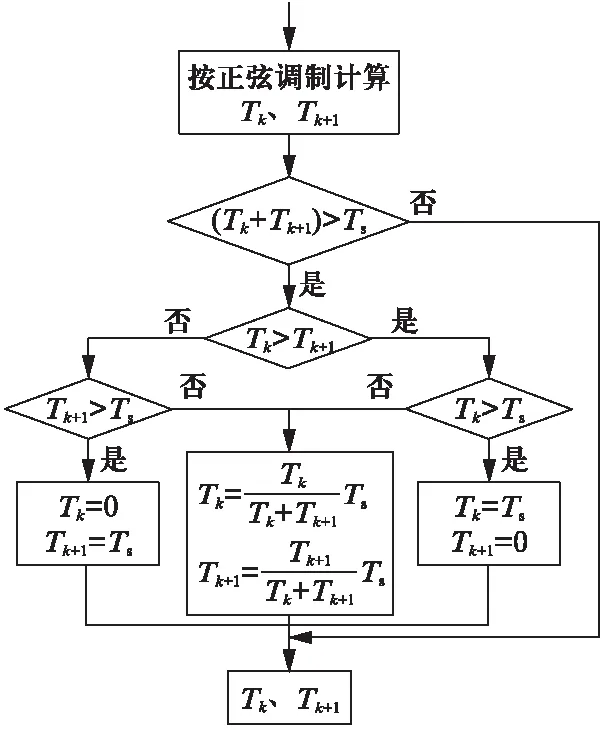
图5 相邻基本电压矢量作用时间的计算流程图
2.2 FOC子系统代码生成与测试
本文选择TI公司的F28335作为电机控制器芯片,CPU频率150MHz,开发环境为CCS IDE,选择运行方式为处理器在环测试(Processor In the Loop, PIL),并对FOC算法子系统进行C代码生成及封装,命名为算法子模块,采用PIL方式对算法子模块进行测试。
2.3 集成微控制器及外设驱动
要实现从仿真模型到C代码生成、对控制器的实时控制,须在仿真模型中集成F28335的微控制器驱动及外设驱动,如ADC驱动、PWM驱动、RESOLVER驱动等。
(1) ADC驱动。本文主要涉及3种模拟量的采集: 通过电流传感器测得的两相定子电流Ia、Ib(第三相电流Ic可以通过Ia+Ib+Ic=0计算得到),及速度请求信号。这3种模拟信号分别接至不同的ADC通道。
(2) PWM驱动。PWM信号用于驱动逆变桥,产生三相正弦电流波形。本文中FOC算法模块的输出数据格式设定为Q17定点型,其数值范围为-1到1,需要使PWM周期、PWM比较值与FOC的输出信号相匹配。其参数设置包括: 周期设置、占空比设置、使能设置、死区时间设置。
(3) RESOLVER驱动。RESOLVER旋转变压器用于对转子角绝对位置检测和转速测量,需要设置好旋变激励信号频率。
2.4 异步调度任务
通过FOC算法设计,在算法模型中集成相应的微控制器驱动及外设驱动之后,需要考虑: (1) 在FOC算法之前起动ADC转换;(2) FOC算法触发与PWM信号保持同步;(3) PWM信号完成后再次起动ADC转换。本文采用任务调度方式,把不同的算法模块放置在不同的任务下,并设置好任务的执行时间。
当完成以上设计后,编译整个模型,进行模型的仿真试验,验证FOC算法;然后完成PMSM控制软件的代码生成与优化,生成可执行文件;最后下载到电机控制器中,即可在电动汽车驱动电机及测功机系统测试平台上进行台架试验。
3 仿真试验及结果分析
在完成FOC模型设计基础之上,通过仿真试验来模拟电动汽车的起动和加速两种行驶工况。仿真试验中,电机模型的主要参数:p=3,Rs=2.875Ω,L=0.835mH,J=0.0008kg·m2,B=0.002,Ψf=0.85Wb。电机在两种工况下的转速及定子三相电流波形如图6所示。
由图6(a)、图6(b)可以看出,在给定转速为3000r/min时,电机在起动过程中存在较小的超调量。经过一定时间的调整后达到给定转速,转速响应平稳,同时电机在起动瞬间,需要一个较大的三相电流,当电机达到给定的目标转速后,三相电流平稳。由图6(c)、图6(d)可以看出,电机在0.02s时开始从1000r/min加速,在较小的时间内达到1500r/min,电机在起动和加速时,都需要一个较大的三相电流。因此,三相电流在加速过程中有较大脉动,电机运行在较高转速时,三相电流频率也相应增大。
由仿真结果可看出,该设计算法能满足永磁同步电机中、低速的调速要求,转速响应快速。
4 台架试验及结果分析
完成上述仿真试验后,在电动汽车驱动电机及测功机系统平台进行台架试验。采用Remy公司的HVH250-090S永磁同步电机来模拟纯电动汽车的驱动电机。电机的主要参数: 额定功率60kW,额定电压320V,额定输出扭矩210N·m,磁极10对。采用RMS公司的PM100电机控制器作为主控制器;直流电压通过整流柜输出。
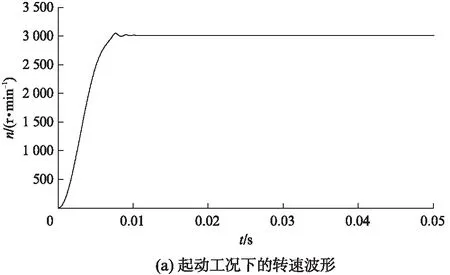
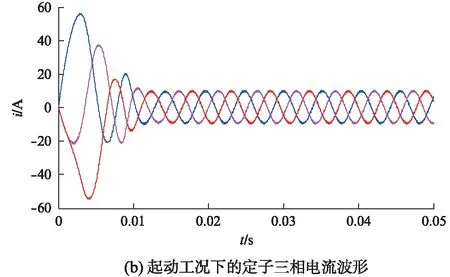
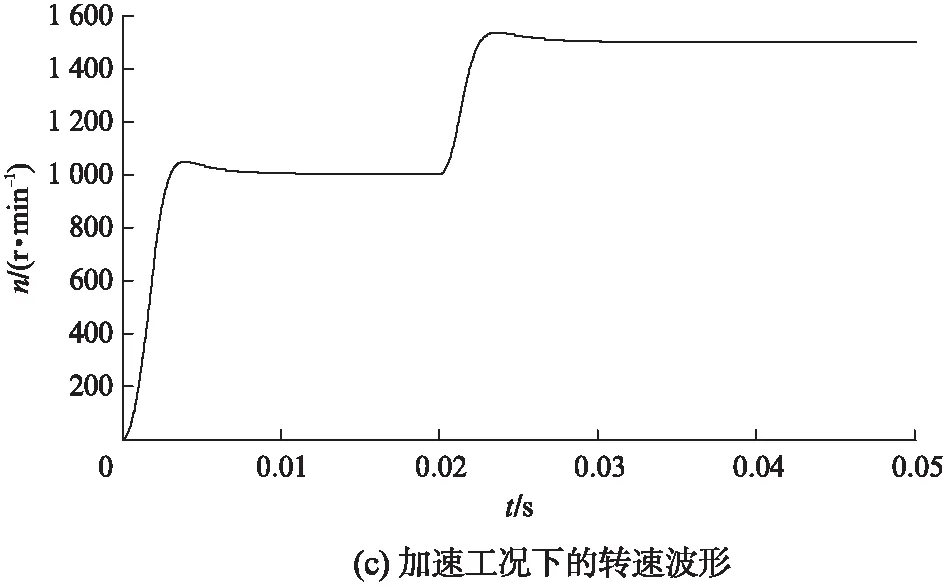
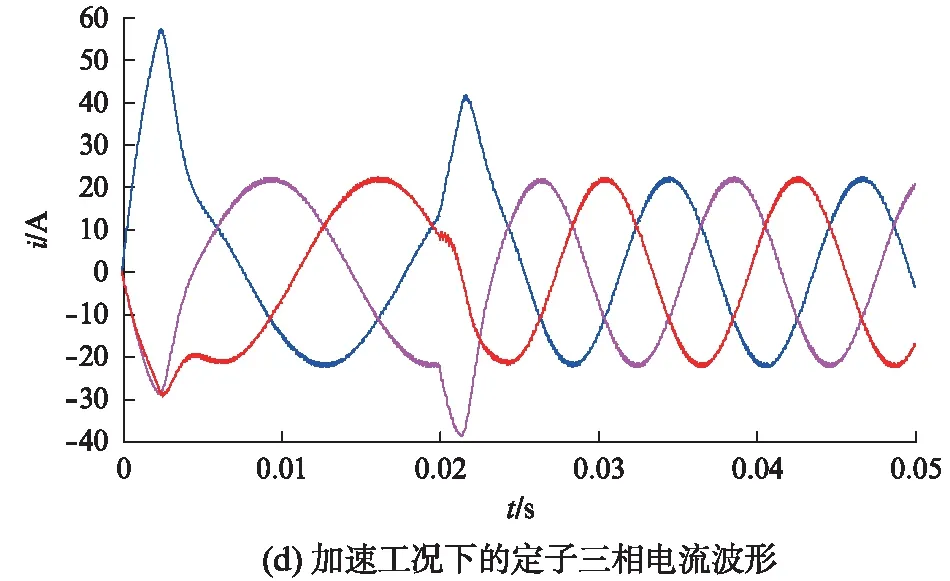
图6 电机在两种工况下的转速及定子三相电流波形
在强电试验之前,需要对电机控制器的PI参数进行设定,使电机输出稳定的转速。其PI参数设置为:① 速度环:Kp=16,Ki=0.0008;② 电流环:Kp=0.01,Ki=0.0004。
基于台架,电机在起动、加速工况下的转速及三相电流波形,如图7所示。
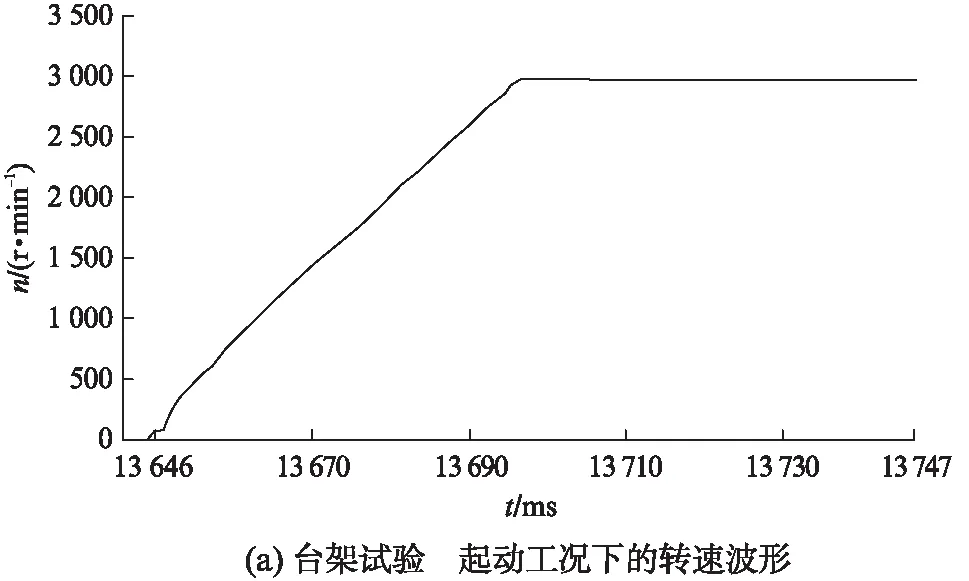
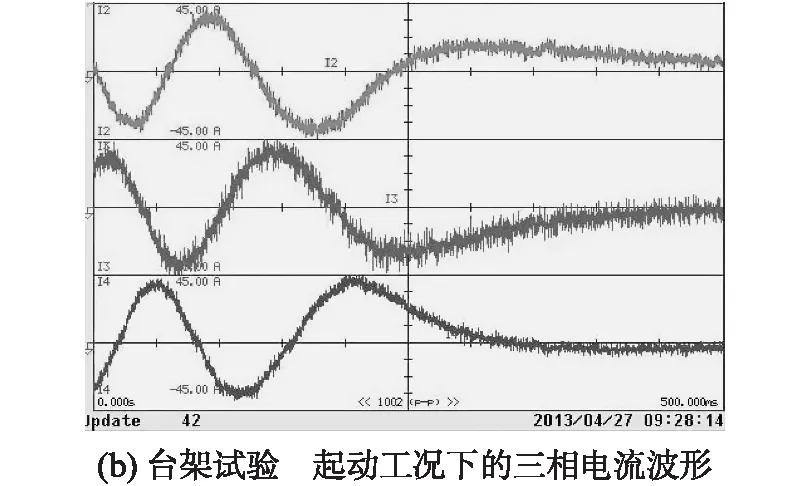
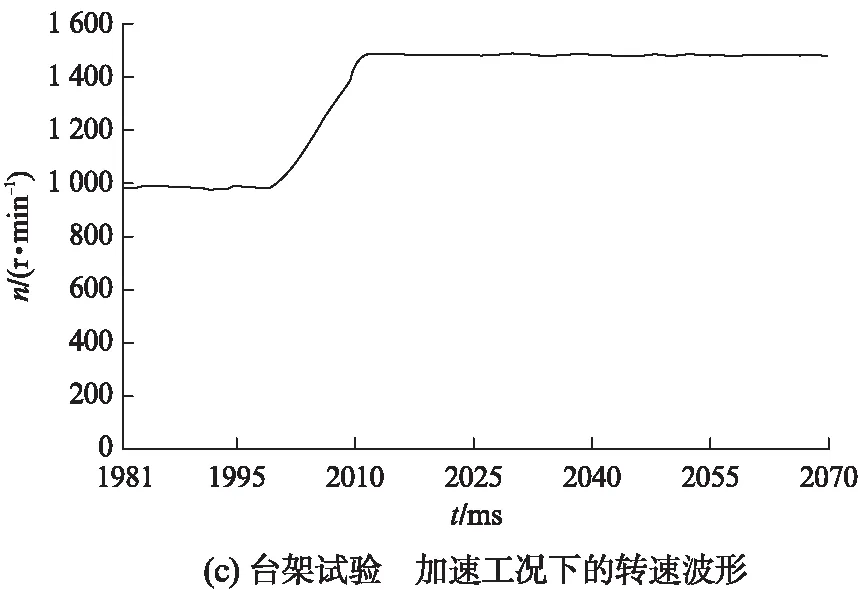
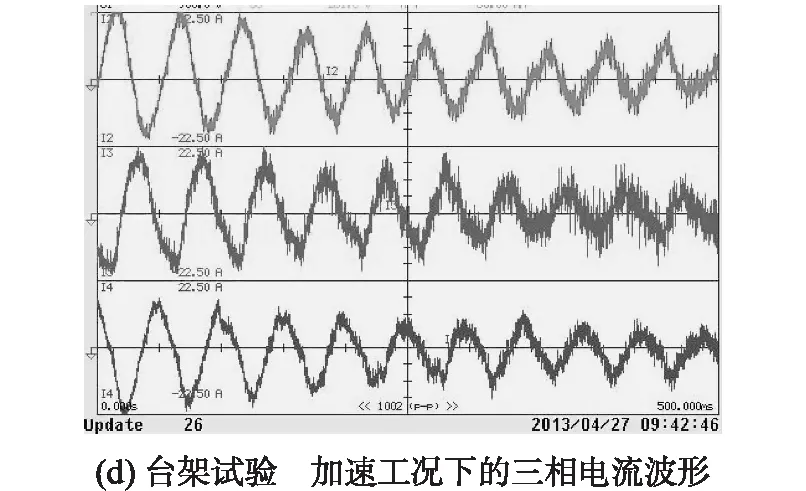
图7 基于台架试验的两种工况下的转速及电流波形
由图7(a)、图7(b)中可以看出,在给定转速为3000r/min时,电机在起动过程中存在较小的超调量,转速响应平稳;在电机起动瞬间,三相电流存在较大的脉动。由图7(c)、图7(d)中可以看出,电机在2s时开始从1000r/min加速,在1s的时间内达到1500r/min,电机达到目标转速后,三相电流频率也相应增大。
台架试验表明,通过起动和加速工况试验来模拟电动汽车行驶工况,电机转速响应快速,满足基本的电机起动、加速要求。
5 结 语
本文从算法设计到实现对电机的控制,开发流程简单,不需要专注于微控制器底层硬件驱动开发,大大缩短电机控制器控制软件的开发周期,将更多的精力用于电机控制算法的设计,提升电机调速性能,并应用于电动汽车的行驶工况中。另外,开发平台建立快速、成本较低,具有很好的实用价值。本文采用基于模型的电机控制算法开发流程,仿真试验验证了FOC算法的可行性,并将优化后的代码应用于对电动汽车驱动电机控制系统中,在电机及测功机系统测试平台上模拟电动汽车两种行驶工况,实现了对电机转速控制的验证试验。试验结果表明,本文所设计的FOC算法具有良好的中、低速性能。
【参考文献】
[1] CHAN C C. The state of the art of electric, hybrid, and fuel cell vehicles [J]. Proceedings of the IEEE, 2007,95(4): 704-718.
[2] PREINDL M, BOLOGNANI S. Model predictive direct speed control with finite control set of PMSM drive systems [J]. 2013,28(2): 1007-1015.
[3] 金宁治,王旭东,李文娟.电动汽车PMSM MTPA控制系统滑模速度控制[J].电机与控制学报,2011,15(8): 52-58.
[4] BLASCHKE F. A new method for the structural decoupling of AC induction machines [C]∥Conf Rec IFAC 1971: 1-15.
[5] SWIERCZYNSKI D, WOJCIK P, KAZMIERK-OWSKI M P, et al. Direct torque controlled PWM inverter fed PMSM drive for public transport [C]∥Advanced Motion Control, 2008 AMC’08 10th IEEE International Workshop on IEEE, 2008: 716-720.
[6] 张华强,王新生,魏鹏飞,等.基于空间矢量调制的直接转矩控制算法研究[J].电机与控制学报,2012,16(6): 13-18.
[7] LAI C K, SHYU K K. A novel motor drive design for incremental motion system via sliding-mode control method [J]. Industrial Electronics, IEEE Transa-ctions on, 2005,52(2): 499-507.
[8] ELBULUK M, LI C. Sliding mode observer for wide-speed sensorless control of PMSM drives [C]∥Industry Applications Conference, 2003 38th IAS Annual Meeting Conference Record of the IEEE, 2003,1: 480- 485.
[9] 宋传玉.永磁同步电机的模糊神经网络控制方法[J].电机与控制应用,2008,35(6): 27-29.
[10] 童克文,张兴,张昱,等.基于新型趋近律的永磁同步电动机滑模变结构控制[J].中国电机工程学报,2008,28(21): 102-106.
[11] 方斯琛,周波,黄佳佳,等.滑模控制永磁同步电动机调速系统[J].电工技术学报,2008,23(8): 29-35.
[12] 刘杰.基于模型的设计及其嵌入式实现[M].北京: 北京航空航天大学出版社,2010.
[13] CAPONIO A, CASCELLA G L, NERI F, et al. A fast adaptive memetic algorithm for online and offline control design of PMSM drives [J]. Systems, Man, and Cybernetics, Part B: Cybernetics, IEEE Transactions on, 2007,37(1): 28- 41.
[14] LI S, ZHOU M, YU X. Design and implementation of terminal sliding mode control method for PMSM speed regulation system [J]. Industrial Informatics, IEEE Transactions on, 2013,9(4): 1879-1891.
[15] 刘杰,周宇博.基于模型的设计——MSP430F28027F28335DSP篇[M].北京: 国防工业出版社,2011.
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
南北桥(2022年2期)2022-05-31 04:28:07
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2020年6期)2020-12-14 07:16:54
电脑知识与技术·经验技巧(2017年9期)2018-02-24 19:55:20
西南交通大学学报(2016年4期)2016-06-15 20:29:36
计算机技术与发展(2016年10期)2016-02-27 00:44:08
电测与仪表(2014年21期)2014-04-04 12:32:08
