
电动汽车用异步电机参数辨识及优化
2014-08-08 03:17:08李强
电机与控制应用 2014年6期
李 强
(中国卫星海上测控部,江苏 江阴 214400)
0 引 言
随着汽车工业的发展以及世界各国汽车保有量的持续增加,能源危机和环境污染等问题日益突出。电动汽车在一定程度可以缓解传统燃油汽车带来的危害。电池、电机及电机控制器是电动汽车的三大关键技术[1]。异步电机因其费用低、可靠性高、转矩波动小和噪声小被广泛应用于电动汽车驱动系统[2]。良好的电机驱动控制技术在很大程度上影响着电动汽车的运动性能,常用的异步电机控制方法有V/f控制、转差频率控制、直接转矩控制、空间矢量控制等。空间矢量控制技术通过旋转坐标变换将强耦合的交流电机等效为直流电机,可以获得与直流电机相同的控制特性,因而在电动汽车驱动电机控制技术中获得了广泛应用。空间矢量控制必须依赖电机参数完成磁场定向以及磁链的计算,如果电机参数精确度不高,将会使矢量控制丧失优势,造成系统动态和稳态性下降,甚至产生振荡[3]。因此,如何精确辨识电机参数是实现矢量控制的首要问题。
本文研究了电动汽车用异步电机的矢量控制基本原理,分析了基于转子磁场定向矢量控制系统对电机参数的依赖性及参数对整个控制系统的影响,提出了一种异步电机离线参数辨识改进算法。在文献[5]的基础上对电机参数进行初步辨识,通过给电机注入带有幅值偏量的正弦信号优化电机转子电阻Rr,通过给电机注入阶跃激励信号优化转子时间常数Tr。最后,在7.5kW异步电机上进行了离线参数辨识,验证了本文所提算法。
1 电动汽车用异步电机基本控制原理
基于转子磁场定向的异步电机矢量控制原理如图1所示。通过转子磁场定向可以将定子电流分解为建立转子磁场的纯励磁分量iM和平衡转子电流的纯转矩分量iT,并实现对纯励磁分量iM和纯转矩分量iT的解耦,通过对定子电流两个分量iM、iT的控制实现异步电机的矢量控制。在电动汽车用异步电机矢量控制系统中,通过“油门踏板”控制转矩电流,从而控制电机电磁转矩,进而控制电机的转速,实现电动汽车的加速、减速行驶。
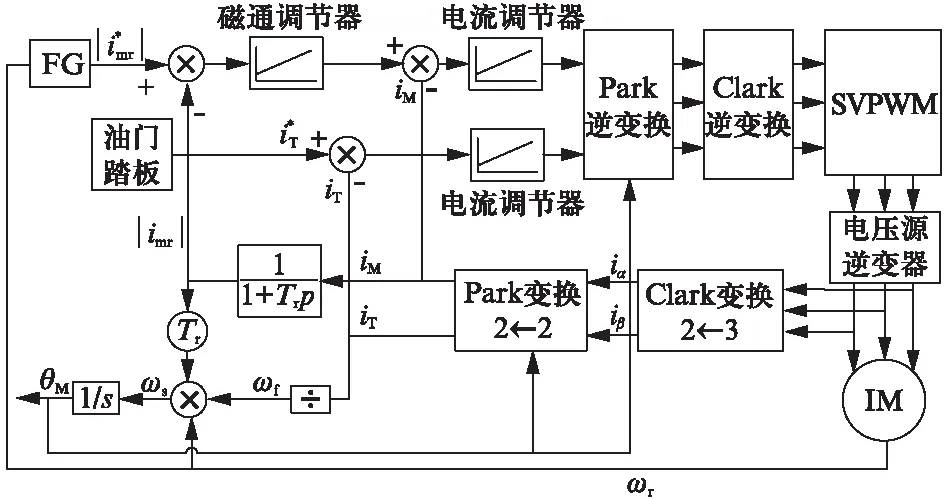
图1 基于转子磁场定向的异步电机矢量控制原理
在转子磁场定向的过程中,必须知道电机的转子电阻Rr、转子时间常数Tr和互感Lm。转子电阻Rr、转子时间常数Tr是对系统影响最大、最关键的参数。如果电机参数与实际值不符,不仅会使矢量控制系统丧失优势,还会对系统的稳态和动态性能产生严重影响,将会使电机过激励,引起磁路饱和、功率因数下降、耗损增大、温升变高,还会使系统产生振荡。电动汽车在正常行驶的过程中,要求其驱动电机变频调速范围宽,因此获得准确的电机参数尤为关键。
2 异步电机参数初步辨识
2.1 异步电机等效电路
根据文献[4],可得异步电机的T型等效电路,如图2(a)所示。可将T型等效电路转换成IΓ型等效电路,如图2(b)所示。

图2 异步电机等效电路
T型等效电路和IΓ型等效电路之间的关系是[4]
(1)
(2)
(3)
式中:Lr=Lm+Lsr。
2.2 转子电阻Rr、互感Lm、转子漏感Lσr辨识
Gastli提出了通过向电机注入单相正弦信号来获得电机参数的方法,并分析了分别在两种不同频率的单相正弦信号激励下,用IΓ型等效电路辨识的电机参数精度比T型等效电路高。基于该研究,本文提出了异步电机转子电阻Rr、互感Lm、转子漏感Lσr辨识的实现方法和步骤。
(4)
(5)
(6)
式中:R2eq=Req-Rs,Rs为定子电阻。根据文献[6]所提算法,通过给电机注入单相直流激励信号辨识定子电阻Rs。
(7)
(8)
(9)
(10)
3 转子电阻Rr及转子时间常数Tr优化
3.1 转子电阻Rr优化
在异步电机矢量控制系统中,将定子三相电流通过坐标变换转换到静止的αβ坐标系中,利用矢量控制系统,向电机α轴通入带有幅值偏量的正弦信号,使电机的α相和β相电流满足式(11)。异步电机α相等效电路,如图3所示。
iαs=I0+Mhsin(ωht)
iβs=0
(11)
式中:I0——额定电流;
Mh——取额定电流的一半。
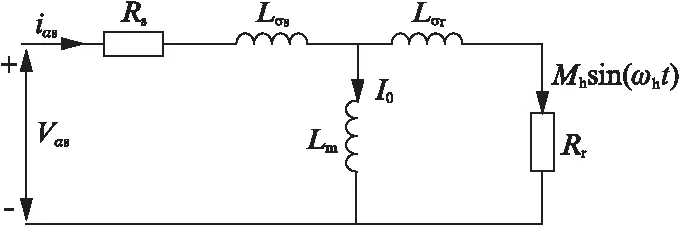
图3 异步电机d相等效电路
当频率ωh足够大时,直流分量I0流过Lm,正弦分量Mhsin(ωht)通过Rr。频率ωh可由式(12)确定。
(12)
则有
(13)
式中,Lm、Lσr、Rr的值可由式(7)~式(9)获得。由图3可知
Rra(Mhsinωht)
(14)
化简式(14),并考虑到Lσs=Lσr,则有
Vαs-Rsiαs=(Rs+Rra)Mhsinωht+
2LσsωhMhcosωht=
AMhsin(ωht+αh)
(15)

由上式可得转子电阻的优化值Rra为
Rra=2Lσsωhcotαh-Rs
(16)
式中,αh为Vαs-Rsiαs和Mhsin(ωht+αh)的相位差,可以通过AD采样和FFT变换获得。
3.2 转子时间常数Tr优化
在两相静止αβ坐标系下,异步电机数学模型为[7]
(17)
在电机控制逆变电路中,给电机定子注入单相阶跃信号,电机处于堵转状态,电机内部不产生旋转磁场,即电机的转速ωr为0,并注意到异步电机内部的转子绕组是短接的,urα和urβ为0,则式(17)可等效为
(18)
考虑到电机的定子电流瞬态过程很短,因此可以忽略与电机定子电流相关的微分项,根据式(18)有
(19)
(20)
由式(19)、式(20)可得
(21)
根据式(21)可得,在αβ坐标系中,定子α相电压usα在单相阶跃信号激励下按指数规律衰减,衰减的时间常数是转子时间常数。式中,Rs、Lm为初步辨识值,usα、isα可通过测量获得,k是与电机有关的常数。因此,根据usα的衰减规律即可确定转子时间常数Tr。
4 试验研究
4.1 转子电阻Rr、互感Lm、转子漏感Lσr初步辨识
为验证本文所提方法的有效性,对7.5kW交流异步电机参数进行辨识。异步电机控制系统框图如图4所示。主控芯片选择TI公司DSPTMS320F-2812,IGBT开关频率为2kHz,死区时间为4.6μs,定子侧直流电压Udc为72V。
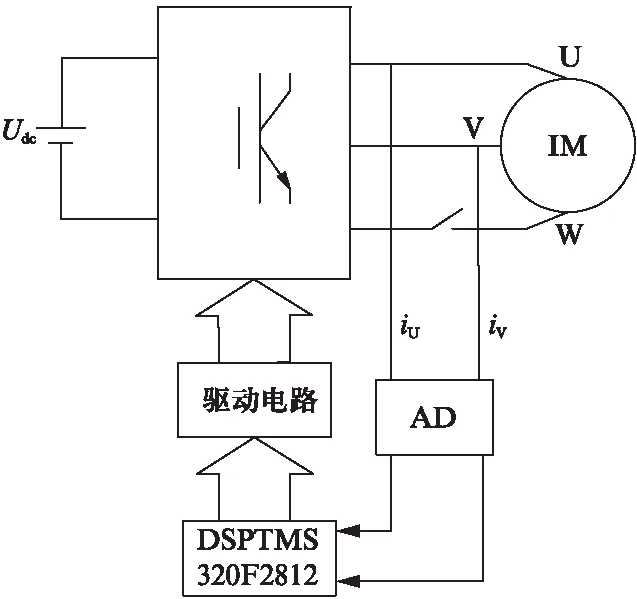
图4 异步电机控制系统框图
图4中,U、V相导通,W相断开,可得到H桥式电机控制原理电路,如图5所示。在H桥式控制原理的基础上,采用SPWM调制方法生成正弦信号。在正弦信号正半周期时,V相保持Sb-始终处于导通状态,对U相进行SPWM调制;在正弦信号的负半周期时,V相则保持Sb+始终处于导通状态,对U相进行SPWM调制。W相一直处于断开状态。这样就等效向电机注入单相正弦激励信号。电流采样方式选择周期中断触发采样,采样周期为167μs。
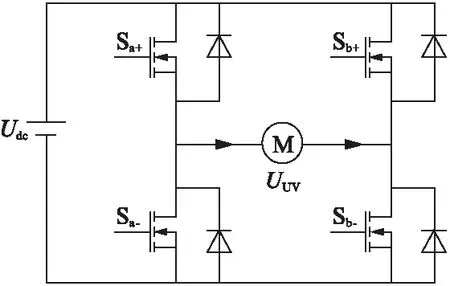
图5 电机H桥式控制原理电路
通过调整载波比可得到不同频率的正弦信号。图5中,通过H桥电路给电机注入频率分别为25Hz和50Hz的正弦电流激励信号,在这两种正弦信号的激励下,通过分析其电压、电流幅值及功率因数,根据式(7)~式(10)可获得电机的基本参数。
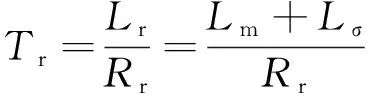
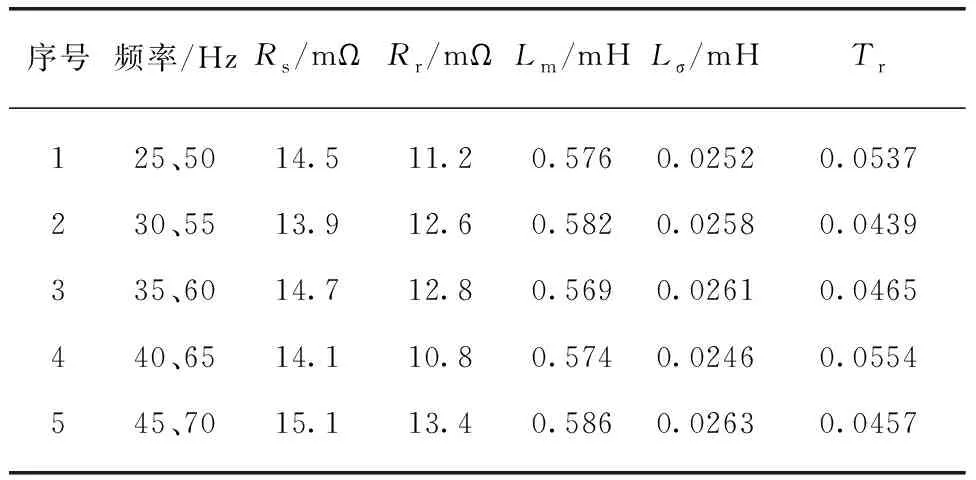
表1 电机参数初步辨识结果
由表1可看出,转子电阻和转子时间常数的误差比较大,分别为12.4%和15.4%。而这两个参数对电机空间矢量控制系统影响最大,因此需要对其进行优化和修正。
4.2 转子电阻Rr修正
本文所选7.5kW异步电机额定电流为 80A。根据式(11),可取I0=80A,Mh=40A。根据式(13)及表1的第一组试验数据计算可得ωh的最小值为61.3Hz,因此取ωh=65Hz。在异步电机矢量控制系统中,控制α相和β相电流满足式(22)。注入电机的正弦激励信号如图6所示。
iαs=80+40sin(50t)
iβs=0
(22)
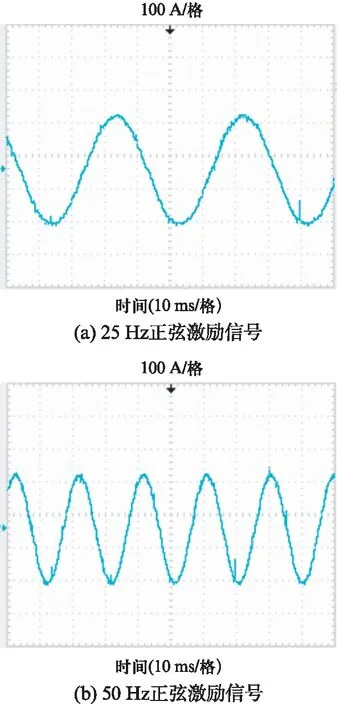
图6 注入电机的正弦激励信号
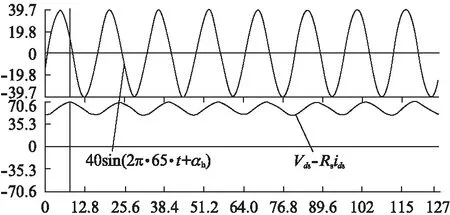
图7 Vds-Rsids和Mhsin(ωht+αh)相位差
通过AD采样和FFT变换可获得两种信号的相位差,如图7所示。根据式(16)即可获得转子电阻修正值为11.3mΩ。当ωh分别取70、75、80、85Hz 时,可以得到多组试验结果,如图8所示。可看出修正后的转子电阻曲线更逼近真值。
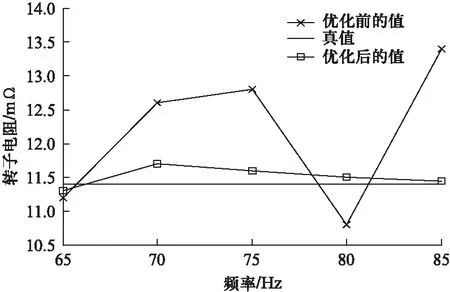
图8 转子电阻优化前后比较
4.3 转子时间常数修正
在两相静止的αβ坐标系中,在t=0.3s时,向电机α相注入幅值为-10A的直流阶跃信号,控制电机迅速进入稳定状态,电机电压呈指数规律衰减,电压衰减的时间常数即为电机转子时间常数。电机定子电压衰减变化曲线如图9所示,电压衰减的指数时间为0.049s,即电机转子时间常数为0.049。
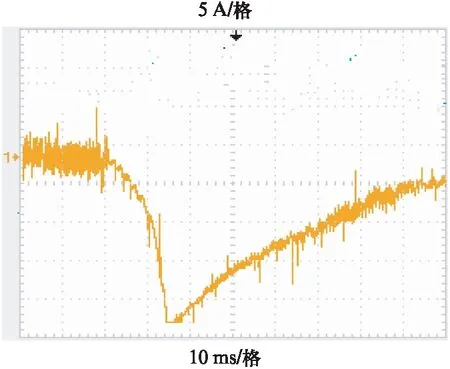
图9 电机定子电压衰减变化曲线
多次试验可以获得多组试验结果。转子时间常数优化前后的比较如图10所示,可以看出修正后的转子时间常数更接近电机的真值。

图10 转子时间常数优化前后的比较
5 结 语
本文对电动汽车用异步电机矢量控制系统进行研究,分析了电机参数对整个控制系统的影响,提出了一种异步电机离线参数初步辨识及优化修正算法。该算法对电机参数进行初步辨识,并在矢量控制系统中通过给电机注入不同的激励信号对电机转子电阻Rr和转子时间常数Tr进行优化修正。最后在7.5kW电机上试验,验证了本文所提算法。参数辨识及优化过程简单易实现、精度高,满足矢量控制的要求,尤其可以满足电机大范围变频调速控制,适用于电动汽车用异步电机参数辨识。
【参考文献】
[1] 崔胜民.现代汽车系统控制技术[M].北京: 北京大学出版社,2008.
[2] ZERAOULIA M, BENBOUZID M E H, DIALLO D. Electric motor drive selection issues for HEV propulsion systems: a comparative study[J]. IEEE Transactions on Vehicular Technology, 2006,55(6): 1756-1764.
[3] 王成元,夏加宽,孙宜标.现代电机控制技术[M].北京: 机械工业出版社,2008.
[4] SLEMON G R . Modeling of induction machines for electric drives[J]. Industry Applications, IEEE Transactions, 1989,25(6): 1126-1131.
[5] GASTLI A. Identification of induction motor equiva-lent circuit parameters using the single-phase test [J]. Energy Conversion, IEEE Transactions, 1999,14(1): 51-56.
[6] 贺艳晖,王跃,王兆安.异步电机参数离线辨识改进算法[J].电工技术学报,2011(6): 77-84.
[7] 阎治安,崔新艺,苏少平.电机学[M].西安: 西安交通大学出版社,2006.
猜你喜欢
电工技术学报(2023年15期)2023-08-10 06:43:38
电气技术(2023年7期)2023-08-08 05:26:36
防爆电机(2020年5期)2020-12-14 07:03:58
防爆电机(2020年4期)2020-12-14 03:11:16
重型机械(2019年3期)2019-08-27 00:58:52
物探化探计算技术(2014年1期)2014-06-27 01:32:50
组合机床与自动化加工技术(2014年10期)2014-03-01 02:22:10
振动、测试与诊断(2014年4期)2014-03-01 01:14:00
电气电子教学学报(2013年1期)2013-07-05 09:41:14
微特电机(2012年12期)2012-11-22 07:51:12
