
组合导航联邦滤波故障检测技术研究∗
2014-08-02 11:49班镜超
遥测遥控 2014年2期
赵 琳, 班镜超
(哈尔滨工程大学 哈尔滨 150001)
组合导航联邦滤波故障检测技术研究∗
赵 琳, 班镜超
(哈尔滨工程大学 哈尔滨 150001)
针对组合导航系统联邦滤波的故障检测问题,基于状态χ2检验法和残差χ2检验法,分别对硬故障和软故障进行故障检测仿真研究,并在此基础上提出一种基于Chebyshev大数定律野值处理和Thompson奇异值剔除法的高效χ2故障检测法。仿真结果表明,状态χ2检验法和残差χ2检验法均能够有效地检验出硬故障和软故障,但残差χ2检验法对软故障稍有检测延迟;利用上述高效χ2故障检测法,基于状态χ2检验法硬故障和软故障检测效率分别提高2.39%和2.00%,基于残差χ2检验法硬故障和软故障检测效率分别提高0.82%和1.41%。
组合导航; 联邦滤波; 故障检测;χ2检验法
引言
作为两种主要的导航定位设备,惯性导航系统INS(Inertial Navigation System)和全球定位系统GPS (Global Position System)的组合应用,可以显著提升导航系统性能。目前,组合导航技术已成为导航技术发展的重要方向之一[1]。组合导航系统主要是针对用户对精度以及容错性的需求进行设计的,进而达到实际要求,而联邦滤波[2,3]作为一种有效的组合导航信息融合实现方式已经得到了广泛的应用。
目前,组合导航系统故障检测技术已经成为导航系统容错性能研究的热点之一。文献[4,5]介绍了状态χ2故障检验法和残差χ2故障检验法在组合导航系统中的故障检测问题,文献[6]介绍了故障检测应用和强跟踪联邦滤波算法,文献[7]介绍了基于量测一致性的联邦滤波故障检测方法。本文主要研究基于INS/GPS组合导航系统联邦滤波的状态χ2故障检验法和残差χ2故障检验法,并在此基础上提出一种基于Chebyshev大数定律[8]野值处理和Thompson奇异值剔除法的高效χ2故障检测法。仿真结果表明,文中所述方法可有效地检测系统故障,具有一定的实用性。
1χ2故障检验法[3]
在联邦滤波器中,常采用χ2故障检验法来确定系统量测信息是否有效。χ2故障检验法是一种通过检验已构造的n维高斯分布的随机向量的均值和方差是否与假设值相符,进而判断是否发生故障的统计假设检验法。根据所构造的随机向量的不同,χ2故障检验法常分为状态χ2检验法和残差χ2检验法。
1.1 状态χ2检验法
状态χ2检验法利用两个状态估计的差异对组合导航系统的故障进行检验。设^Xk是由带有量测更新的卡尔曼滤波器得到的状态估计,它与量测值有关,一旦子系统发生故障便会受到影响;^XSk是由初始信息仅根据状态递推得到的状态估计,它与量测信息无关,不会受到故障的影响。利用这两个状态估计的差异便可对故障进行检测。
状态χ2检验法对于软故障和硬故障都有较好的检测效果,但由于计算过程中需要两个状态估计值,导致计算量大大增加,给高效率计算带来一定负担。
1.2 残差χ2检验法
残差χ2检验法利用新息序列作为估计量对系统进行故障检测。残差χ2检验法具有计算量较小的优点。若系统发生软故障,由于时间延迟的特点,利用残差χ2检验法检测故障不是很理想,而且若系统故障对量测量的作用是通过其他量间接作用,则利用残差χ2检验法检测的效果也不是很理想。
2 故障检测中野值与奇异值数据的处理
在组合导航故障检测过程中,有时采集到的INS或GPS数据存在数据跳变或奇异值的情况,若此类数据不能得到很好的处理,则很可能被故障检测单元认作是故障情况而进行处理,这便大大降低了故障检测的效率。对于野值和奇异值情况的处理,本文采用如下方法。
2.1 Chebyshev大数定律野值处理
Chebyshev大数定律:设{Xk}(k=1,2,…)为两两互相独立的随机变量序列,均值E{Xk}存在,方差D{Xk}≤c(k=1,2,…),c为常数,则对于任意正数ε,有

推论:设随机变量序列X1,X2,…相互独立,且E{Xk}=μ及D{Xk}=σ2均存在(k=1,2,…),则对于任意的正数ε,有

假设μ为测量的真值,Xk为第k次量测值,由于量测是重复独立进行的,故可认为{Xk}互相独立。根据上述定律,当量测次数n较大时,n次测量值的算术平均值与真值μ的偏差小于ε的概率十分接近1。因此,对于存在野值的情况,我们可以通过设置时间间隔,在保证每一段时间间隔内数据量较大的前提下,以均值代替INS/GPS数据的野值点,使得χ2检验法具有较高的检测效率。
2.2 Thompson奇异值处理
Thompson奇异值剔除法:设试验中得到的n个数据X1,X2,…,Xn,为检验是否含有奇异值,先按式(3)计算

然后求得统计量

进而得到剔除准则

式中,t(n-2,α)为学生氏t分布分位点,可根据自由度n-2和显著水平α从学生氏t分布查得。利用上述奇异值剔除法,可以对组合导航奇异值数据做准确的处理,为提高故障检测效率奠定了基础。
3 组合导航联邦滤波模型
联邦滤波器采用两级结构的分散化滤波方法,它由若干个子滤波器和一个主滤波器组成;各个子滤波器独立进行时间更新和量测更新;主滤波器中进行时间更新和各个子滤波器结果的融合。融合后的结果可反馈到各个子滤波器,作为下一个处理周期的初值。联邦滤波由于采用了两级结构的分散化滤波形式,其滤波器状态维数低,因此计算量小,而且滤波器容错性能好。
INS/GPS组合导航系统联邦滤波器的结构如图1所示,子滤波器1为速度子滤波器,子滤波器2为位置子滤波器。子滤波器1完成速度量测更新,子滤波器2完成位置量测更新,子滤波器1和2对每步的滤波结果进行故障检测,判断子滤波是否发生故障,继而将无故障的信息传递给主滤波器。在主滤波器中只进行状态更新,无量测更新,最后在主滤波器中完成信息的最优融合。

图1 INS/GPS组合导航系统联邦滤波故障检测结构图
3.1 状态方程
导航坐标系选择为东、北、天坐标系,建立系统的状态方程如下:

式中,X(t)=[φE,φN,φU,δVE,δVN,δVU,δL,δλ,δh,εbx,εby,εbz,εrx,εry,εrz,∇x,∇y,∇z]T为状态向量,其中φE、φN、φU为姿态失准角,δVE、δVN、δVU为三维速度误差,δL、δλ、δh为三维位置误差,εbx、εby、εbz为陀螺常值漂移,εrx、εry、εrz为陀螺一阶马尔可夫漂移,∇x、∇y、∇z为加速度计一阶马尔可夫偏置,F(t)为系统矩阵[3],G(t)为噪声驱动阵,w(t)=[wgx,wgy,wgz,wrx,wry,wrz,wax,way,waz]T为系统噪声。
3.2 量测方程
速度子滤波器量测方程为

式中,Z1(t)为INS和GPS的三维速度之差,有

V1(t)为GPS速度观测噪声。
位置子滤波器量测方程为

式中,Z2(t)为INS和GPS的三维位置之差,有

V2(t)为GPS位置观测噪声。
4 仿真实验
根据上述INS/GPS组合导航模型,结合野值处理和奇异值剔除方法,分别利用状态χ2检验法和残差χ2检验法进行硬故障和软故障检测。
4.1 仿真条件
利用轨迹发生器产生飞行轨迹,在计算机MATLAB平台上进行仿真,此轨迹由匀加速直线运动、匀速直线运动、等高恒半径转弯以及以上飞行状态之间的过度过程组成。其轨迹如图2所示。

图2 飞行轨迹图
初始纬度为45.7732°,经度为126.6805°,子滤波器的更新频率为10Hz,主滤波器的更新频率为1Hz,INS传感器和GPS的相关误差参数设置见表1。

表1 INS和GPS相关误差参数
对GPS经度量测量分别在50s和50s~500s加以500m和1000的硬故障和软故障,利用状态χ2检验法和残差χ2检验法,取α=0.005进行检测。
4.2 仿真结果
根据如上仿真条件,状态χ2检验法的仿真结果如图3所示。

图3 状态χ2检验法仿真结果
根据如上仿真条件,残差χ2检验法的仿真结果如图4所示。
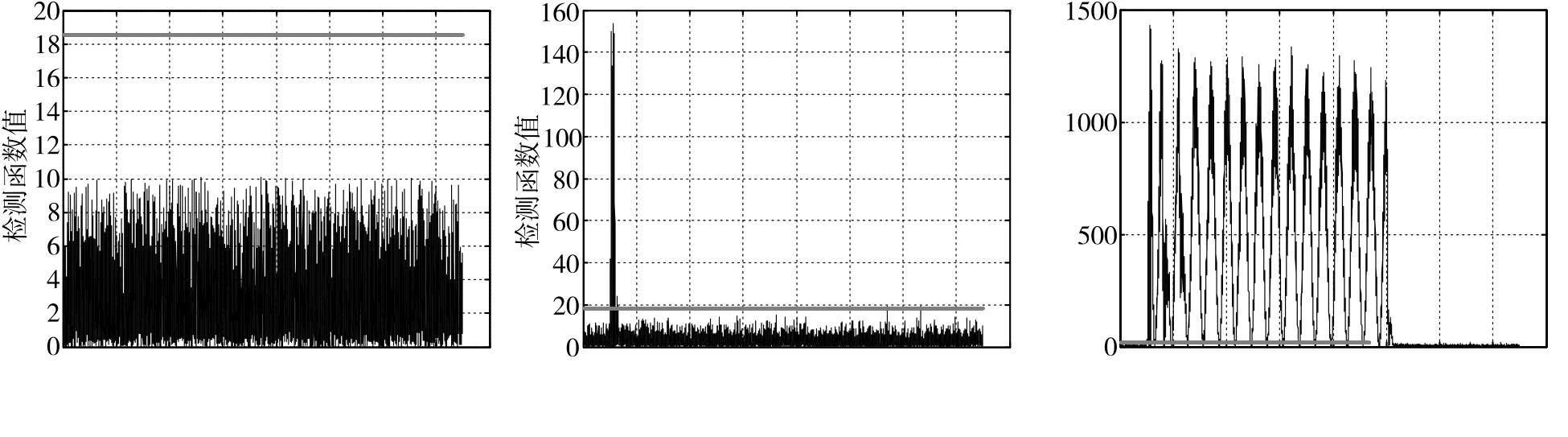
图4 残差χ2检验法仿真结果
两种检测方法的仿真时间如表2所示。

表2 两种检测方法仿真时间
从上述仿真结果可以看出,利用文中所述的状态χ2检验法和残差χ2检验法均能够有效地检测出软、硬故障的发生,而对于软故障,残差χ2检验法稍微有检测延迟,但不明显。另外从表2中可以看出,结合Chebyshev大数定律和Thompson奇异值剔除法对数据进行预处理,可以使利用状态χ2检验法时,硬故障和软故障检测效率分别提高了2.39%和2.00%,利用残差χ2检验法时,硬故障和软故障检测效率分别提高0.82%和1.41%,这种效率的提高,对于工程上数据量较大的系统,其意义更为显著。
5 结束语
本文针对组合导航系统联邦滤波的故障检测问题,分别利用状态χ2检验法和残差χ2检验法对硬故障和软故障进行了故障检测仿真研究,提出一种结合Chebyshev大数定律和Thompson奇异值剔除法对数据进行预处理,以提高检测效率的方法。随着人们对高精度、高可靠性导航定位应用需求的日益增加,多传感器组合导航系统越来越复杂,精确完成故障检测已成为了亟需解决的问题之一,因此,本文所述方法具有一定的研究价值。
[1] Gai E.The Century of Inertial Navigation[J].Aerospace Conference Proceedings,IEEE,2000,11(1):59~60.
[2] Carlon N A.Federated Filter for Fault-tolerant Integrated Navigation Systems[J].Proceeding of IEEE PLANS’88,1988:110~119.
[3] 秦永元,张洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社,2004:191,312~314.
[4] 钱华明.故障诊断与容错技术及其在组合导航系统中的应用研究[D].哈尔滨工程大学,2004:43~49.
[5] 何德军,李东兵,潘鸿飞.χ2检验法在组合导航子系统故障检测中的应用[J].战术导弹技术,2011,6(4):76~80.
[6] Ma Yunfeng.Application of Fault Tolerant and Federated Strong Tracking Kalman Algorithm in Integrated Navigation System[J].Journal of Weifang University,2011:3946~3949.
[7] 荣 军,邱 恺,陈天如,吴训忠.基于量测一致性的联邦滤波故障检测方法研究[J].传感技术学报,2006,4 (19):2557~2558.
[8] 哈尔滨工程大学应用数学系编.概率论与数理统计[M].哈尔滨:哈尔滨工程大学出版社,2006:157~158.
Federated Filter Fault Detection Technology Research for Integrated Navigation
Zhao Lin, Ban Jingchao
Based on the state and residualχ2test methods,the fault detection research is done on the hard and soft fault conditions with respect to the problem of federated filter fault detection for integrated navigation.Then an efficientχ2fault detection method based on the Chebyshev large numbers law and Thompson outlier scalping method is proposed.Simulation result shows that the state and residualχ2test methods are able to effectively test the hard and soft faults,but the residualχ2test method for the soft fault detection has a slight delay.By utilizing the efficient method described above,the efficiency of stateχ2test method increases 2. 39%and 2.00%on the hard and soft fault conditions respectively,and the efficiency of residualχ2test method increases 0.82% and 1.41%on the hard and soft fault conditions respectively.
Integrated navigation; Federated filter; Fault detection;χ2test method
V249.32
A
CN11-1780(2014)02-0009-05
赵 琳 1968年生,工学博士,教授,博士生导师,研究方向为惯性导航技术、卫星导航技术、组合导航技术、信息处理与计算机仿真。
国家自然科学基金项目资助(No.61273081)(No.61304234)
2013-12-03
班镜超 1989年生,硕士研究生,研究方向为组合导航。
猜你喜欢
家庭影院技术(2020年10期)2020-12-14
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
家庭影院技术(2019年7期)2019-08-27
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
中国惯性技术学报(2017年1期)2017-06-09
临床医药文献杂志(电子版)(2017年11期)2017-05-17
中国惯性技术学报(2016年5期)2016-12-23
百科探秘·航空航天(2016年9期)2016-12-01
暨南学报(哲学社会科学版)(2016年11期)2016-11-26
俄罗斯问题研究(2013年1期)2013-03-11
