
大气探测激光雷达望远镜设计方法研究∗
2014-08-02 11:49赵一鸣李菁文李凉海
遥测遥控 2014年2期
刘 波, 赵一鸣, 李菁文, 李凉海, 于 勇
(北京遥测技术研究所 北京 100076)
大气探测激光雷达望远镜设计方法研究∗
刘 波, 赵一鸣, 李菁文, 李凉海, 于 勇
(北京遥测技术研究所 北京 100076)
望远镜是大气探测激光雷达接收系统中的重要组成部分,用于接收激光与大气相互作用后的光回波信号。分析望远镜在大气探测激光雷达系统中的作用,利用几何光学光线追迹方法,详细研究两镜形式望远镜的光学参数计算方法与遮光罩尺寸计算方法。实例计算得到一组口径150mm、视场1mrad、F#=5的Dall-kirkham望远镜,验证了设计方法的正确性,证明方法可有效提高激光雷达光学仿真性能。
大气探测激光雷达; 望远镜光学设计; 遮光罩设计
引言
与定点采集、微波遥感等其他大气探测手段相比,工作在光学波段的激光雷达具有探测范围广、距离分辨率高等优点。短波长和高距离分辨率的结合使激光雷达适合探测气溶胶层与稀薄的云层,精确描绘其内部垂直结构,并直接得到云和气溶胶的光学参数[1]。
望远镜作为大气探测激光雷达接收系统中的重要组成部分,其设计结果与激光雷达系统指标、探测性能紧密相关。在大气探测应用领域,反射式望远镜在材料获取、宽波段消色差方面,比透射式望远镜更具优势[2]。在反射式望远镜中,两镜式与牛顿式相比,其望远镜筒长更短、更易装调,更适合激光雷达系统的集成与生产。因此,本文主要研究两镜式望远镜的设计方法。
1 大气探测激光雷达望远镜相关参数研究
典型的离轴式大气探测激光雷达系统结构如图1所示,主要由激光器、望远镜、光学处理系统、光电探测器、信号处理机等部分组成。激光器发射激光脉冲,望远镜接收激光与大气相互作用后产生的后向散射回波信号,光学处理系统对光束进行分束、滤光等处理,光电探测器将光信号转化为电信号,信号处理机对电信号进行采集与处理,最终将处理结果显示在显示器上。
望远镜会影响大气探测激光雷达的接收性能,利用雷达方程可分析望远镜与激光雷达系统之间的关系。弹性散射激光雷达方程见式(1)。

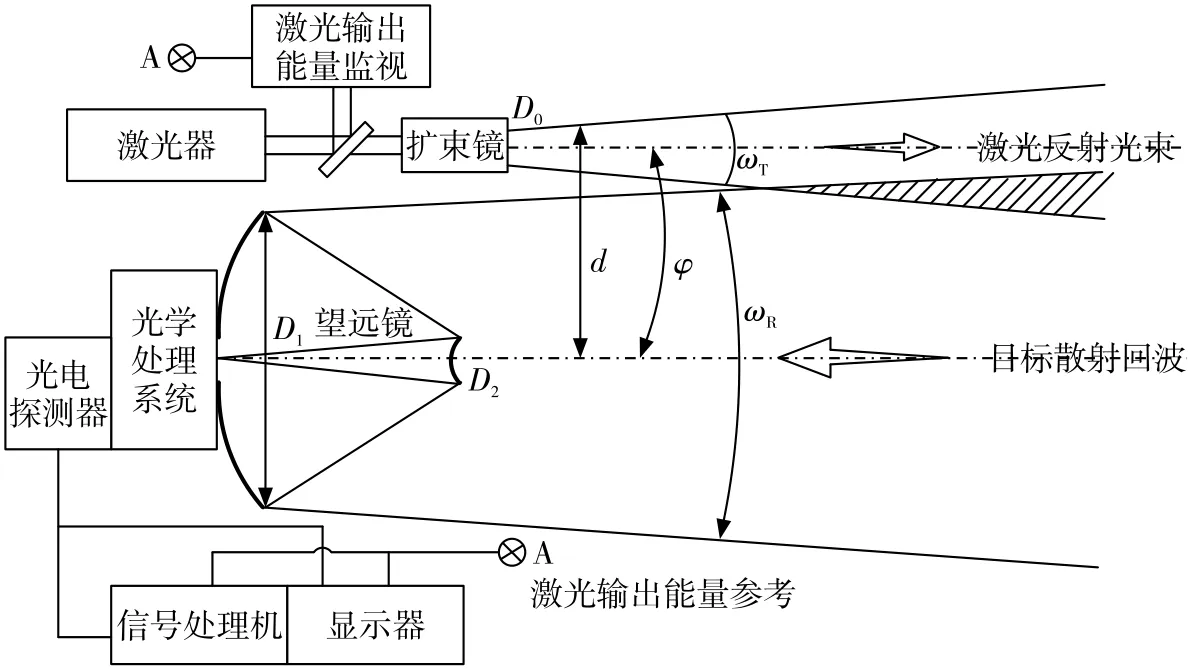
图1 典型离轴式大气探测激光雷达系统结构
式中,PL为激光脉冲的峰值功率;λL为入射激光波长;A0为望远镜接收面积;z为激光雷达探测距离;望远镜接收立体角;ξ(λL)为大气传输系数;ξ(z)为遮蔽系数;c为光速;τL为激光脉冲宽度;β(λL, z)为大气后向散射系数;α(λL,σ)为大气消光系数;σ为激光雷达距离分辨单元。其中,望远镜接收立体遮蔽系数ξ(z)两项与望远镜有关。望远镜接收面积A0影响激光雷达系统的最大作用距离,遮蔽系数ξ(z)影响激光雷达近距离的探测性能,包括探测盲区与OVERLAP距离。ξ(z)的计算公式见式(2)[3]。


A{rT(z),W(z);d(z)}代表距离雷达z处激光光斑与望远镜接收区域的重叠面积,其中d(z)=dzφ,d为激光雷达发射光轴与接收光轴的距离,φ为发射光轴与接收光轴的夹角。
由式(3)可知,增大激光器发散角与发射口径、减小发射光轴与接收光轴间距离以及增大望远镜接收视场与接收口径,可使激光束更早地进入望远镜接收视场(图1中阴影区域),有利于减小激光雷达系统盲区与OVERLAP距离。遮蔽系数ξ(z)的详细计算过程及方法参见文献[3],本文不再赘述。总之,望远镜设计需综合考虑各类设计因素,保证激光雷达整体探测性能最优,即与激光器参数联合论证,综合考虑激光雷达系统信噪比、动态范围、体积与重量、制造成本等因素,而不是盲目地减小望远镜中心遮拦,增大望远镜接收视场与接收口径。一般激光雷达接收望远镜F#(焦距与口径比值)在3~6之间,视场为激光发散角的2~10倍[4]。
2 两镜式望远镜设计方法研究及仿真
2.1 设计要求
大气探测激光雷达总体技术要求如表1所示。

表1 大气探测激光雷达总体技术要求
根据大气探测激光雷达总体技术要求,确定望远镜设计参数,如表2所示。
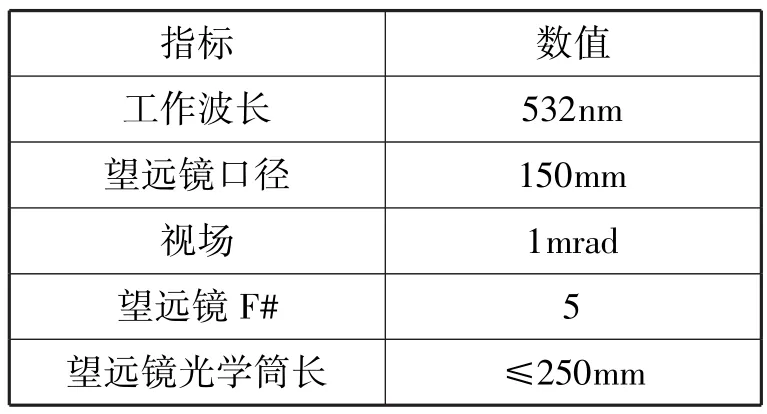
表2 望远镜设计参数
望远镜除表2中指标要求外,还有如下技术要求:①望远镜孔径光阑置于主镜顶点处,视场光阑置于焦面处;②从系统整机考虑,望远镜焦点置于主镜与次镜中间;③设计望远镜遮光罩,抑制背景光噪声,滤除1mrad视场之外的杂散光。
2.2 设计过程
2.2.1 符号定义与参数假设
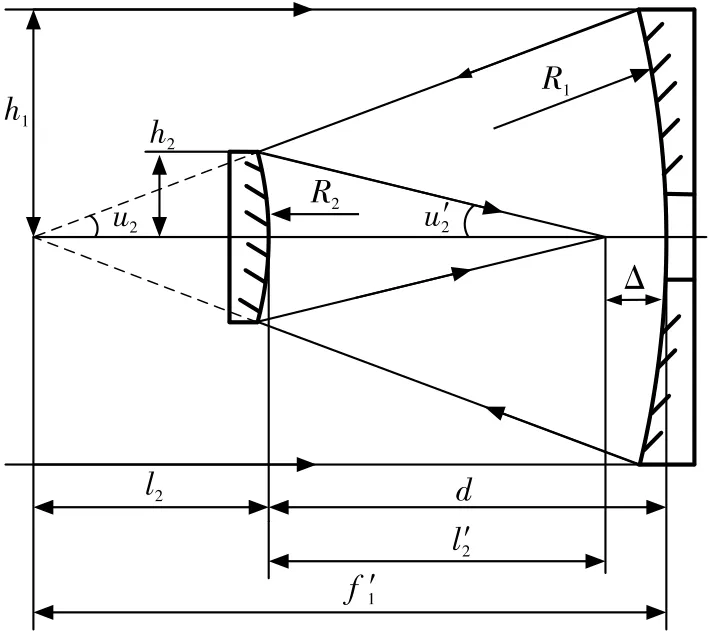
图2 两镜式望远镜符号定义
两镜式望远镜光学系统基本符号定义如图2所示。为方便计算,引入α与β两个假设参数α代表望远镜线性遮挡,它影响望远镜筒长;β代表望远镜次镜放大倍率,主镜焦距乘以β即为系统焦距。
2.2.2 计算公式[5]


其中,f′为系统焦距,k1为主镜非球面系数,k2为次镜非球面系数,其余参数见图2。
2.2.3 望远镜筒长设计
为满足望远镜筒长≤250mm的指标要求,提高大气探测激光雷达设备的工程应用性,对影响望远镜筒长设计的因素进行分析。由式(4)~式(6),可以推导出望远镜筒长的另一种表达形式

望远镜口径D与F#为设计参数,是固定量。由式(11),要缩短望远镜筒长,应减小望远镜主镜同时减小Δ。调研国内光学非球面加工水平,综合考虑加工周期与成本,主镜设计时取=2具有较好的工程可实现性[6]。Δ根据望远镜准直镜焦距确定,在准直镜不伸出主镜的前提下,保证Δ值最小,最终Δ值确定为50mm。
2.2.4 遮光罩设计
遮光罩是大气探测激光雷达望远镜的重要组成部分。大气探测激光雷达接收的回波信号为大气中气溶胶与大气分子的后向散射信号,由于气溶胶与大气分子后向散射系数小,因此望远镜接收的光信号强度弱,再加上白天探测时受太阳杂散光的影响,导致系统探测信噪比降低,最终影响激光雷达远距离探测性能。遮光罩可有效滤除望远镜视场之外的太阳杂散光,提升激光雷达白天的探测性能。
本文利用几何光线追迹的方法进行遮光罩设计,保证望远镜视场之内的光线通过主镜、次镜的反射到达焦面,望远镜视场之外的光线全部被遮光罩遮挡。主、次镜遮光罩几何光线追迹如图3所示。对望远镜引入光线1与光线2两条视场边缘光线,光线1经望远镜入瞳中心边缘J点,被主镜反射至次镜边缘C点,最后到达焦面上边缘G点。光线2由次镜遮光罩边缘B点引入,经过主镜H点反射至次镜,最终入射到焦面。光线1入射角度+0.5mrad,光线2入射角度-0.5mrad。根据B点纵坐标值(由系统中心遮拦m决定)与光线JD,可确定次镜遮光罩顶点位置。根据光线CG与光线HE,可确定主镜遮光罩顶点A点位置。计算时先确定关键点坐标,在文献[7]的基础上,为获得更高的计算准确度,考虑非球面偏离因素,得到式(12)~式(17),求得B点、A点坐标,进而得到主、次镜遮光罩尺寸。

图3 主、次镜遮光罩几何光线追迹
①求解关键点坐标

②求解光线JD方程

③计算Δx1、Δx2

④求取B点坐标

⑤求取光线CG方程

⑥求取光线HE方程

⑦求取点A坐标

2.3 仿真结果
由式(4)~式(10)得到望远镜光学初始参数,如表3所示。

表3 望远镜光学初始参数
根据式(18)[8]计算四类望远镜非球面度,非球面度小的镜片加工成本低。通过计算,最终选取Dallkirkham结构,次镜为球面,主镜非球面度δmax=0.002mm。

利用ZEMAX光学仿真软件对设计结果进行验证。ZEMAX光学仿真软件是美国ZEMAX公司开发的一套综合性的光学设计仿真软件产品,它基于几何光线追迹原理,具有光学系统设计、优化及公差分析等功能。将本文计算得到的Dall-kirkham望远镜光学初始参数输入ZEMAX光学仿真软件中,得到光学结构图、MTF图、点列图如图4所示。调制传递函数MTF>0.6@55lp/mm(利用CCD对望远镜进行装调,CCD像素大小9μm×9μm,截止频率55lp/mm),弥散斑RMS较小,具有较好的像质,证明了光学初始参数计算的准确性。

图4 ZEMAX光学仿真结果
由表2的设计参数,根据式(12)~式(17)可计算出望远镜主镜、次镜遮光罩尺寸。将计算结果与ZEMAX+AUTOCAD软件仿真结果相比较(追迹光线100条),如表4所示,可见,望远镜主、次镜遮光罩计算值与仿真值相符,验证了计算方法的正确性。

表4 望远镜主镜、次镜遮光罩尺寸
3 结束语
本文研究了大气探测激光雷达望远镜的设计方法。首先分析了望远镜与大气探测激光雷达系统的关系;然后利用几何光线追迹法,详细给出了两镜式望远镜光学参数计算方法与遮光罩尺寸计算方法;最后以口径150mm、视场1mrad、焦距750mm的大气探测激光雷达望远镜设计为例,计算得到短筒长、焦点内置的Dall-kirkham望远镜。仿真软件验证结果表明,本文方法计算结果正确,计算过程简单有效,便于工程化应用,对激光雷达的光学系统设计仿真具有一定的实用价值。
[1] Winker D M,Couch R H and McCormicP K.An Overview of LITE:NASA's Lidar In-space Technology Experiment [J].Proc.IEEE,1996,vol.84:164~180.
[2] 潘君骅.光学非球面的设计、加工与检验[M].北京:科学出版社,1994,10~11.
[3] Raymond M.Measures Laser Remote Sensing Fundamentals and Applications[M].Florida:Wiley-Interscience Publication,1984,256~270.
[4] Herbert Walther.Lidar Range-resolved Optical Remote Sensing of the Atmosphere[M].America:Claus Weitkamp,2005,254~255.
[5] Qian Yixian,Fan Changjiang.Optical Design of Cassegrain System with Asperical Surfaces on CCD Airborne Remote Sensing Camera[C].Multimedia Technology(ICMT),Ningbo,2010,1~4.
[6] 李 圣,戴一帆,等.大中型光学非球面镜制造与测量新技术[M].北京:国防工业出版社,2011,9~10.
[7] 高郭鹏.双反射系统的杂散光抑制研究[D].中国科学院西安光学精密机械研究所,2009,35~43.
[8] Hao Peiming,Li Xinglong.Manufacture of Φ600 R-C Optical System[C].2nd International Symposium on Advanced Optical Manufacturing and Testing Technologies:Large Mirrors and Telescopes,Xian,2005,10.1117/12.674046.
刘 波 1986年生,硕士,主要从事激光雷达,红外光学系统研究工作。
赵一鸣 1983年生,博士,主要从事激光雷达遥感、偏振成像的理论及实验研究。
李菁文 1988年生,硕士,主要从事光学系统设计工作。
李凉海 1965年生,研究员,主要研究方向为雷达制导及雷达系统总体设计。
于 勇 1971年生,博士,研究员,主要研究方向为雷达制导及雷达系统设计。
Research on Telescope Design Method of Atmospheric Lidar
Liu Bo, Zhao Yiming, Li Jingwen, Li Lianghai, Yu Yong
The telescope is an important part in the atmospheric lidar,which is mainly used to receive the optical signal scattered by atmosphere.This paper studies the role of telescope in the atmospheric lidar,and detailedly discusses the optical parameter calculation method and baffle design method of two-mirror telescope.Through the methods we have designed a 150mm diameter,1mrad view,F#=5 Dall-kirkham telescope,which verifies the accuracy of the design method.This design method can effectively improve the optical design ability of atmospheric lidar.
Atmospheric lidar; Telescope's optical design; Baffle design
TN249
A
CN11-1780(2014)02-0037-06
北京市科委资助项目(Z121100001412005)
2013-11-05 收修改稿日期:2013-12-10
猜你喜欢
北京测绘(2022年5期)2022-11-22
现代电子技术(2022年18期)2022-09-17
荆楚理工学院学报(2022年2期)2022-09-16
科学技术创新(2021年25期)2021-09-11
汽车观察(2021年8期)2021-09-01
光电工程(2020年9期)2020-09-29
中国交通信息化(2019年1期)2019-03-26
中国医疗设备(2019年1期)2019-01-15
电子制作(2018年16期)2018-09-26
中国光学(2017年4期)2017-08-01
