
攻占GNSS高动态高精度测量制高点的思考
——关于北斗卫星导航信号的一项应用建议
2014-08-02 11:49刘基余
遥测遥控 2014年2期
刘基余
(武汉大学测绘学院 武汉 430079)
Liu Jiyu
攻占GNSS高动态高精度测量制高点的思考
——关于北斗卫星导航信号的一项应用建议
刘基余
(武汉大学测绘学院 武汉 430079)
纵观现行的GNSS系统可知,北斗卫星导航系统,是目前完全运行的唯一的三频导航系统。笔者建议,我们应该抓紧这个难得的历史机遇,尽快将三频北斗导航信号接收机推向卫星导航市场,抢先占据高动态高精度测量的制高点!本文对三频信号做导航定位测量的主要优越性进行了较深入分析,供研讨!
GNSS导航信号; 载波相位测量; 伪距测量; 宽巷波长; 窄巷波长
引言
自2010年以来,GPS/GLONASS系统的新型工作卫星均发送三种导航信号,Galileo和北斗卫星也发送三种导航信号。但是,在这四大系统中,目前真正完全运行的三频导航系统,仅仅是北斗卫星导航系统,因此,笔者认为,我们应该抓紧这个难得的历史机遇,尽快将三频北斗导航信号接收机推向卫星导航市场,抢先占据高动态高精度测量的制高点!本文对用三频导航信号做导航定位测量的主要优越性进行了较深入分析,供研讨!
1 GNSS卫星三种导航信号的近况
GNSS系统,目下主要是GPS、GLONASS、Galileo和北斗等四大系统。它们的导航卫星现已开始发送三种导航信号;此处予以简要论述之。
1.1 GPS卫星的三种导航信号
21世纪初叶开始,GPS卫星全球定位系统的空间部分和地面监控系统,逐步实施现代化。而于2010年8月1日发射了第一颗BlockⅡF卫星(如图1所示),它在BlockⅡA/IIR/ⅡR-M卫星所发送导航信号的基础上增加了一个新的GPS信号——L5,以此形成了用3个GPS信号(L1,L2,L5)同时进行导航定位的新格局。并拟于2015年开始发射GPSⅢ卫星,它们较之BlockⅡF卫星所发导航定位信号而言,在其第一导航定位信号(L1)上增加一个民用测距码——L1-C码,致使民间用户能够用GPSⅢ卫星的3个GPS信号(L1,L2,L5)和4个民用测距码同时进行导航定位测量(如表1所示)。从该表参数可知,L1/L2/L5信号的载波频率分别为1575.42MHz、1227.60MHz和1176.45MHz,值得注意的是,L2-CL码时间周期的相应尺长为450000km,如此之长的“测尺”,能够单值地测定站星距离,从而有利于快速解算出实时在航点位,扩大GPS的应用天地。目前,在31颗GPS工作卫星中,仅仅有4颗BlockⅡF卫星发送三频导航信号,余者仅发送双频导航信号。

图1 2010年8月1日始发的BlockⅡF卫星发送3个GPS信号(L1,L2,L5)形成导航定位新格局

表1 GPS现代化后民用测距码的基本参数
1.2 GLONASS卫星的三种导航信号
2011年2月26日,俄罗斯联邦航天局发射了第1颗GLONASS-K1卫星,它是第三代GLONASS导航卫星,该种卫星的设计工作寿命增至10年。GLONASS-K1卫星是一种基于非加压平台建造的全新小型卫星,较之以前所有的GLONASS卫星更加轻便,仅重935kg,发射成本较低廉。GLONASS-K1在GLONASS-M卫星所发送导航信号的基础上增加了一个新的GLONASS信号——L3,以此形成了用3个GLONASS信号(L1,L2,L3)同时进行导航定位的新格局(如图2所示)。GLONASSK1卫星新增设的第三个导航定位信号(L3),其频分多址(FDMA)信号的载波频率为1201.74MHz~1208.51MHz,此外,它还增设了一个码分多址(CDMA)信号,其载波频率为1202.025 MHz,该CDMA信号简称为L3 OC(O为开放使用信号,C为CDMA)。
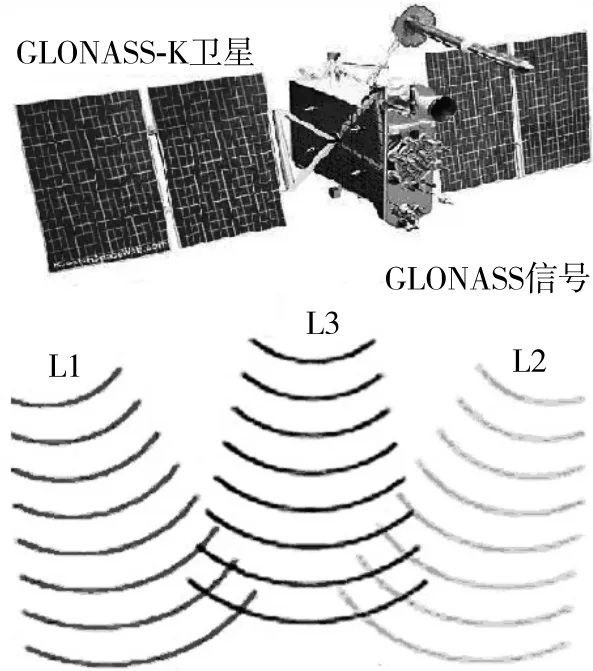
图2 GLONASS-K卫星发送三种导航信号
综观GLONASS L3 OC信号和GPS L5信号的性能可知(见表2所示),两者各有优劣,主要表现为下述几点:①GPS L5信号的自相关特性优于GLONASS L3 OC信号1.6dB;②GLONASS L3 OC信号互相关特性优于GPS L5信号0.5dB~1.5dB;③GLONASS L3 OC信号奇偶相关特性比较平衡,而GPS L5信号的奇偶互相关特性存在较大的差距。由此可见,GLONASS L3 OC信号在导航性能等方面,能够与GNSS卫星导航信号实现较好的兼容与互操作,达到扩大应用之目的。
GLONASS信号的现况与发展见表3所示,L1/L2/L3 CDMA信号的各个分量如图3所示,它们较详细地描述了同一个CDMA信号的I、Q两个支路中各个信号分量的调制方法和使用范围,这便于使用者予以有效接收和恰巧处理。通过导航信号的改进,致使GLONASS卫星的实时导航定位在2017年后能够达到±5m的三维定位测量精度和±6ns的定时测量精度。

表2 GLONASS L3 OC和GPS L5结构参数比较

续表

表3 GLONASS信号的现况与发展

图3 GLONASS L3/L2/L1 CDMA信号的各个分量图示
1.3 北斗卫星的三种导航信号
2012年12月,中国卫星导航系统管理办公室发布了北斗卫星导航系统空间信号接口控制文件(ICD)的公开服务信号B1I(1.0版),我们简称它为ICD B1I文件。该文件仅仅给出了B1I信号及导航电文等内容:B1I信号的标称载波频率为1561.098MHz,B1I信号采用正交相移键控(QPSK)调制,B1I信号为右旋圆极化(RHCP)波。B1I信号是北斗卫星的公开服务信号,它是由I、Q两个支路的“测距码+导航电文”正交调制在载波上构成的。第j颗北斗卫星B1I信号的数学表达式为

式中,上角标j为卫星编号,下角标I为I支路,下角标Q为Q支路,A为信号振幅,C为测距码,D为调制在测距码上的数据码,f0为载波频率,φj为第j颗北斗卫星的载波初相。
在ICD B1I文件中没有发布其它BeiDou信号的相关数据,只能够依据我国学者近年来在境外GNSS学术研讨会上的英文PPT报告而综合成表4所示的BeiDou信号基本参数。在此情况下,北斗系统所提供的导航定位服务内容如表4所示,表5是2013年3月19日在武汉观测到的9颗北斗卫星相关参数,我们测得了7颗北斗卫星的三频导航信号。
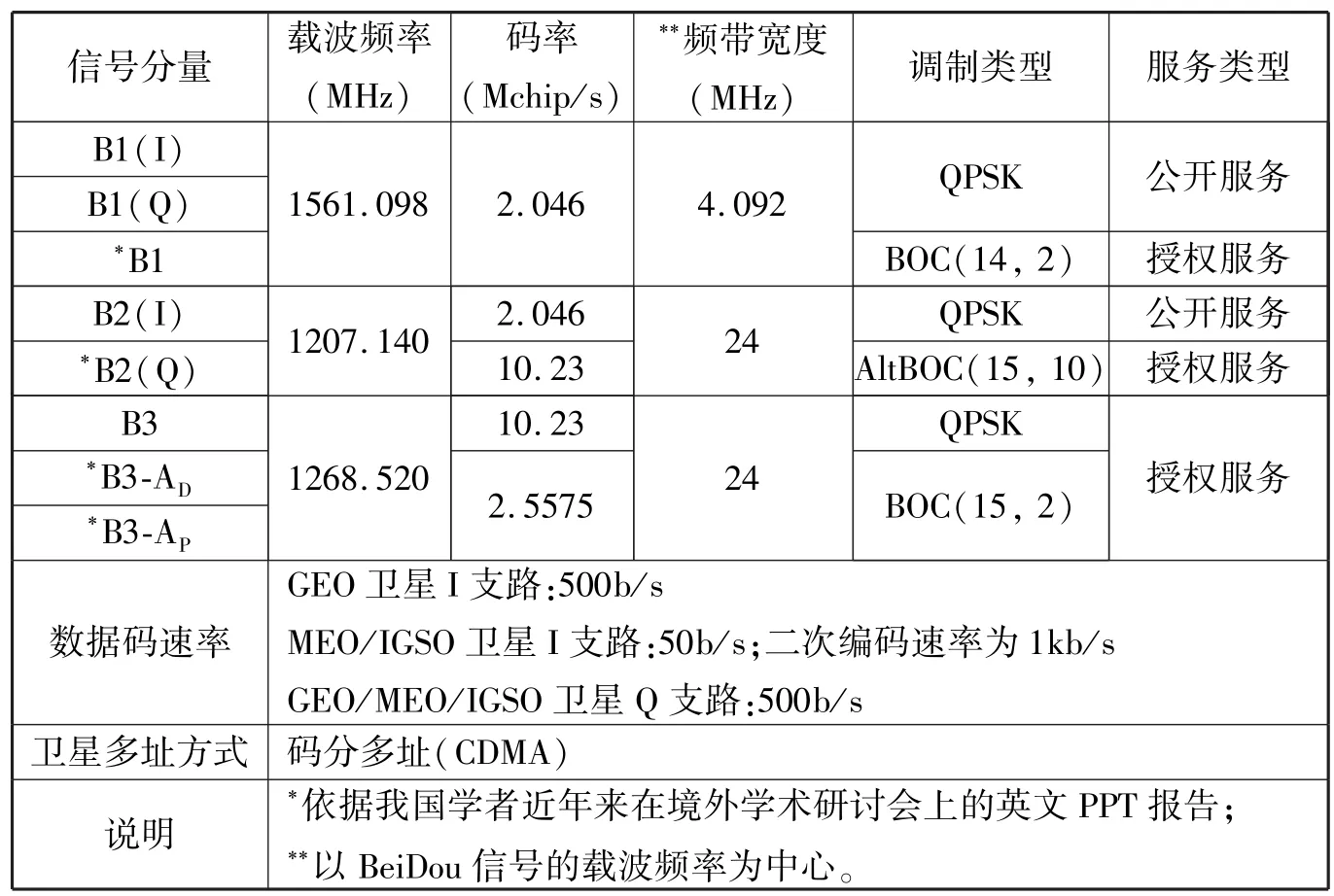
表4 BeiDou信号的基本参数

表5 2013年3月19日在武汉观测到的9颗北斗卫星
1.4 Galileo卫星的多种导航信号
依据“Galileo OS SIS ICD,Issue 1.1,September 201”的公示,Galileo卫星采用下列五个载波频率发送导航信号:1575.420MHz(E1)、1278.750MHz(E6)、1191.795MHz(E5)、1176.450MHz(E5A)、1207.140MHz(E5B)。Galileo公用信号,采用1575.420MHz(E1)、1207.140MHz(E5B)和1278.750MHz (E6)三个载波。E1载波频率与GPS第一导航定位信号的载波频率(fL1)是一致的,采用BOC调制隔离两者的测距码,而互不干扰(如图4所示)。E5A载波和E5B载波调制着Galileo卫星导航电文,后者是分别用伪噪声码CI和伪噪声码CQ进行扩频传送的;两者的数据传输率分别为50sps和500sps。

图4 Galileo CBOC信号和GPS L1-C/A码的有效分离图示
E5A信号和E5B信号,分别设立I分量和Q分量,它们的码率将选为10.230Mchip/s、5.115Mchip/s或2.046Mchip/s,这比GPS信号C/A码的码率1.023Mchip/s要高些。但是,它们的最终选定将取决于民航DME/TACAN和军方JTIDS/MIDS环境。E5B信号的数据传送率亦待选定。E5A信号I分量的伪噪声码采用直接序列,其时间周期为20ms的倍数,以确保导航定位全程解算的单值性。E5B信号I分量的伪噪声码也采用直接序列,该伪噪声码的长度周期为2N×10230码元,N取决于数据率,用以确保单值地全程解算出导航定位值。E5A信号和E5B信号的Q分量上的伪噪声码均为直接序列,码长为10230码元,Q分量上不带数据,而作为导引信号(pilot channel),以此协助恢复数据信号,快速获取Galileo卫星导航电文。E5A信号和E5B信号的I分量和Q分量之间的功率是平衡的。E5A载波频率为1176.450MHz,而E5B载波频率是1207.140MHz。表6列述了Galileo信号各个分量的基本参数及其调制方式。E1信号的频带宽度为24.552MHz,E6信号的频带宽度为40.920MHz,E5信号的频带宽度为51.150MHz,E5A/E5B信号的频带宽度都是20.460MHz。自2002年3月24日欧盟首脑会议批准建设Galileo全球导航卫星系统以来,欧州已经在2005年12月28日和2008年4月27日,分别发射了带激光后向反射镜阵列(又称为激光反射器)的试验卫星GIOVE-A和GIOVE-B,并于2011年10月21日和2012年10月12日分别发射了各两颗Galileo IOV卫星(MEO),其还拟于2019年完成共30颗卫星的发射任务,最终建成Galileo系统。

表6 Galileo信号的基本参数
2 三个导航信号的作用非凡
北斗卫星用1561.098MHz、1207.140MHz和1268.520MHz三个载波频率发送BeiDou信号,当用其测距码做导航定位时,公开服务的精度指标是,三维定位精度为±10m、定时精度为±20ns、测速精度为±0.2m/s。如果采用载波相位测量技术,用户能够获得远高于这个精度指标的导航定位精度。依据美国Trimble公司的CenterPoint RTX全球跟踪网于2013年春天对北斗GEO-3、IGSO-6和MEO-14卫星三频导航信号的测量成果可知,三颗北斗卫星的载波相位观测值均能达到±11mm左右的测量精度,详见图5。这也表明,用北斗导航信号的载波相位观测值能够实现厘米级精度的动态定位测量。

图5 北斗GEO-3、IGSO-6和MEO-14卫星三频导航信号的载波相位测量误差
卫星导航定位误差分为卫星误差、传播误差和接收误差三大类(详见《GPS卫星导航定位原理与方法》一书的§8.2节,刘基余编著,北京科学出版社于2013年1月出版发行)。电离层时延改正误差,是传播误差的主项之一,而且难以模型化;研究表明,电离层时延改正模型误差为±2~100m。因此,在卫星导航定位测量中,必须着力削弱电离层时延改正误差。采用三频北斗导航信号,可以消除电离层效应对航天器定轨测量的精度损失,而获得厘米级精度的高动态测量点位。现予以讨论之。
依据《GPS卫星导航定位原理与方法》中§6.4所论,北斗卫星的第二、三导航信号的载波相位观测值,亦能获得下列宽巷和窄巷观测方程

式中

ρ为以米为单位的站星真实距离;A为电离层效应引起的距离偏差系数;ƒi为第i个载波的频率;C为真空中光速;Φ2、Φ3为以周为单位的第二、三载波(B2、B3)的相位观测值;N2、N3为第二、三载波(B2、B3)的整周模糊度。
依据第二、三载波(B2、B3)的频率值,算得它们的宽巷和窄巷波长分别是

仿效《GPS卫星导航定位原理与方法》中式(6.4.13)和式(6.4.14)的推导方法,我们能够推导出三频宽、窄巷载波相位测量的波数,它们分别是

式中,Pi为B2/B3导航信号的伪距观测值(i=2,3),λi为B2/B3导航信号的载波波长(i=2,3)。
依式(2)有

从式(4)可知:
①用按上述公式算得的宽、窄巷载波相位测量值(Φ′d、Φ′a),以及它们的波长(λ′d、λ′a)和波数(N′d、N′a),可以精确地求得站星距离(ρ);
②由于采用北斗导航信号载波相位/伪距测量值进行组合解算,而消除了电离层效应(I23)的影响;
③用无电离层效应影响的站星距离(ρ)解算的用户位置,不仅精度较高,而且能够确保用户位置的置信度。
综上可知,只要器载北斗导航信号接收机能够同时测得三个导航信号(B1、B2、B3)的伪距和载波相位观测值,对它们进行组合解算,则仅用一台器载北斗导航信号接收机,就能够消除电离层效应的影响,进而用无电离层效应影响的站星距离(ρ)解算出稳定而高精度的航天器在轨三维位置。
此外,因λ′d=4.8876m,而能更准确地求得波数N′d,有益于用OTF解算实时在航点位。OTF算法的首要问题是,求定载波相位测量整周模糊度的初始值。当用调制在上列三个载波上的一个伪噪声码测得三个伪距(PB1、PB2和PB3)时,则可按下列算式求得载波相位测量整周模糊度的初始值

A12=3.97433662,A13=4.88736354,A23=20.17906332
B12=3.84647162,B13=3.69926530,B23=20.15426993
故可按所测得的伪距PB1、PB2、PB3和上列A、B系数算得整周模糊度的初始值。由此种方法求得的整周模糊度初始值,比按现行双频观测值求得的整周模糊度初始值要更接近整周模糊度的正确值,而可缩小整周模糊度的搜索区间;大大加速解算整周模糊度正确值的速度;这可为高动态环境下应用北斗导航信号载波相位测量创造很好的工作基础。
3 结束语
依据本文所推导出的北斗伪距/载波相位测量值线性组合的宽、窄巷波长表达式,并按照GPS和Galileo卫星所发送的三种导航信号的载波频率以及GLONASS卫星的三种CDMA信号的载波频率,可以计算出四大系统的宽巷和窄巷波长,如表7所示。从该表数据可见,四大系统的双频和三频窄巷波长都相差较少,但是,四大系统的双频和三频宽巷波长却相差较大,其值为4m~6.5m。较长的宽巷波长有利于载波相位测量波数的快速求解,开创载波相位测量的高动态应用新局面。
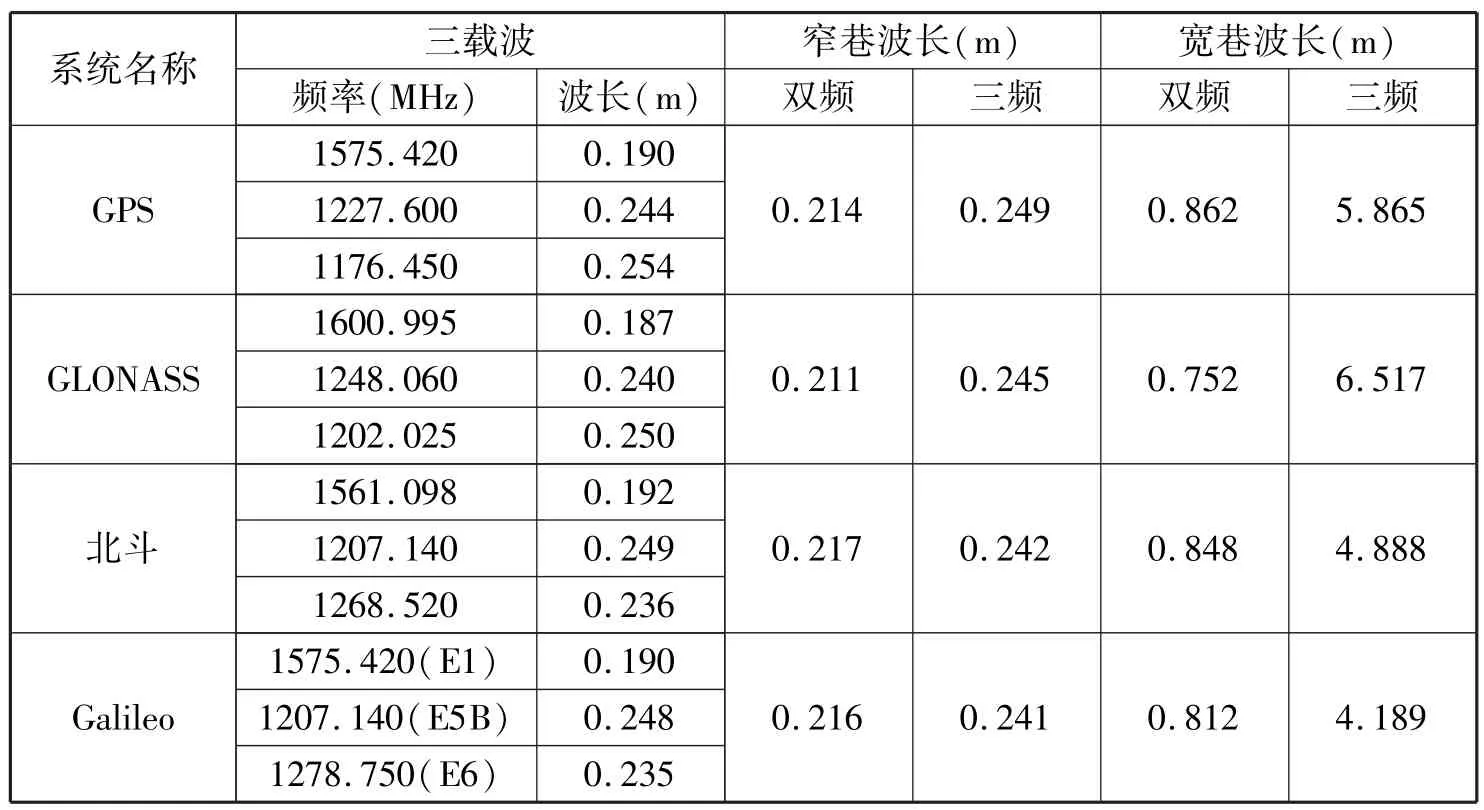
表7 四大系统的宽巷和窄巷波长
从本文对北斗卫星三频导航信号的数学分析及其相关计算可知,用它的三频信号做导航定位测量的主要优越性可概括为下列几点:①能够获得4.888m的宽巷波长,而有利于准确快速地求解出载波相位测量的波数,为高动态环境下应用载波相位测量奠定了优异的技术基础;②能够在仅用一台北斗导航信号接收机的情况下,消除电离层效应的精度损失,获得厘米级精度的高动态测量点位,开创北斗导航信号载波相位测量应用的新局面;③能够利用宽巷/窄巷波长、载波相位观测值及其波数求得精确的站星距离值,高精度地测得用户三维位置和速度。因此,笔者建议,我们应该抓紧北斗系统是目前完全运行的唯一的三频导航系统这个难得的历史机遇,尽快将三频北斗导航信号接收机推向卫星导航市场,抢先占据高动态高精度测量的制高点!
[1] 刘基余.GPS卫星导航定位原理与方法[M](第二版).北京:科学出版社,2013.
[2] 刘基余.GPS现代化及其影响[J].数字通信世界,2011,(8):24~30.
[3] 刘基余.GLONASS全球导航卫星系统及其得失点[J].数字通信世界,2011(专刊):50~55.
[4] 刘基余.Galileo全球导航卫星系统发展述评[J].数字通信世界,2012,(2):66~72.
[5] 刘基余.北斗卫星导航系统的现况与发展[J].遥测遥控,2013,34(3):1~8.
[6] Yuni Urlichich,Valeriy Subbotin,et al.GLONASS Modernization[J].GPS World,November 1,2011.
Thinking for Capturing GNSS Commanding Heights on the High Dynamic and Accurate Measurements
Throughout the current GNSS systems shows that the Beidou navigation satellite system is currently the only fully operational tri-band navigation system.The writer suggests that we should seize this rare historical opportunity,as soon as to make the three-frequency signal receivers get into GNSS satellite navigation market on the high dynamic and accurate measurements.This paper discusses the main advantages using three-frequency signal for navigation and positioning measurement by means of a more indepth analysis.For discussion.
GNSS navigation signals; Carrier phase measurement; Pseudorange measurement; Wide lane; Narrow lane
P228
A
CN11-1780(2014)02-0001-08
Liu Jiyu
刘基余 现任武汉大学测绘学院教授/博士生导师,兼任美国纽约科学院(New York Academy of Sciences)外籍院士、中国电子学会会士。主要研究方向是GNSS卫星导航定位/卫星激光测距技术,已在国内外30余种中英文学术期刊上发表了250余篇相关研究论文,独著了(北京)科学出版社于2013年1月出版发行的《GPS卫星导航定位原理与方法》一书。主要业绩分别载于美国2001年出版发行的《世界名人录》(Who's Who in the World)、美国2005年出版发行的《科技名人录》(Who's Who in Science and Engineering)和2007年中国科学技术协会出版发行的《中国科学技术专家传略》工程技术编(电子信息科学技术卷2)等五十多种国内外辞书上。
2013-11-21 优先数字出版日期:2014-01-21
优先数字出版网址:http://www.cnki.net/kcms/doi/10.13435/j.cnki.ttc.000001.html
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
大地测量与地球动力学(2022年7期)2022-07-06
房地产导刊(2021年12期)2021-12-31
金点子生意(2019年1期)2019-11-21
雷达学报(2018年5期)2018-12-05
中南大学学报(自然科学版)(2016年2期)2017-01-19
中国照明(2016年4期)2016-05-17
现代工业经济和信息化(2016年8期)2016-05-17
西部广播电视(2015年10期)2016-01-18
芳草·文学杂志(2015年3期)2015-05-28
