
混合χ2检测法在组合导航系统故障检测中的应用
2016-12-23 01:45张华强李东兴张国强
中国惯性技术学报 2016年5期
张华强,李东兴,张国强
(山东理工大学 机械工程学院,淄博 255049)
混合χ2检测法在组合导航系统故障检测中的应用
张华强,李东兴,张国强
(山东理工大学 机械工程学院,淄博 255049)
为提高SINS/GPS组合导航系统的可靠性,在分析了残差χ2检测法和双状态χ2检测法的基础上,提出一种混合 χ2检测法。该方法中残差 χ2检验法和双状态 χ2检验法并行工作且共用同一个卡尔曼滤波器,同时残差 χ2检验法的检测结果决定了对双状态 χ2检验法的两个状态递推器的操作:当残差 χ2检验法检测到组合导航系统故障时,则通过控制开关使卡尔曼滤波结果不对两个状态递推器进行状态重置,反之,如果残差χ2检验法检测系统正常,则允许卡尔曼滤波结果对状态递推器进行状态重置,从而有效地解决了残差χ2检验法对软故障不敏感的问题和双状态χ2检验法的两个状态递推器易受污染的问题,组合导航系统故障诊断结果由残差χ2检测法和双状态χ2检测法共同决定。仿真实验分析表明,该方法能够降低虚警率,有效地提高组合导航系统故障诊断的准确性和可靠性。
组合导航系统;混合χ2检验法;状态递推器;故障检测
随着现代电子技术的不断发展,各类工程系统的复杂程度也越来越高,系统的可靠性和安全性受到越来越多的重视,故障检测技术已经成为保障各系统可靠性工作的重要措施[1-2]。捷联惯性导航系统SINS和GPS导航系统构成的组合导航系统在各领域得到了越来越广泛地应用。组合导航系统的故障检测是提高组合导航系统可靠性的重要途径[3-4],其中,常用的故障检测方法包括残差χ2检验法和双状态χ2检验法。
采用残差χ2检验法很难检测组合导航系统的软故障,而对于系统硬故障的检测效果要好得多[5-6]。双状态χ2检验法能够有效地解决状态递推器误差逐渐扩大的问题,但两个状态递推器交替工作的时间间隔的选择非常重要[7]。如果选择得过小,则在系统发生故障时,经过状态递推器两次重置仍可能未被检测出来;如果选择得过大,则由于状态递推器随时间增长会引起方差增大、精确性降低的问题,因而影响到双状态χ2检验的准确性,容易产生虚警[8-9]。
针对残差χ2检验法和双状态χ2检验法各自的优点和存在的缺陷,有必要研究将两者结合起来使用,达到取长补短,提高系统故障检测准确性的目的。本文综合了残差χ2检验法和双状态χ2检验法的优点,提出了一种新的故障检测方法即混合χ2检验法。该方法利用两者相互配合对动态系统进行故障检测,组合导航系统故障诊断结果由残差χ2检测法和双状态χ2检测法共同决定。
1 传统χ2检测法原理及性能分析
1.1 故障系统动态模型的建立
常用带故障系统的离散动态模型如下[10]:

式中:X是系统状态向量;Z是系统量测向量;W是系统噪声向量;V是量测噪声向量;Φ是系统状态转移矩阵;Γ是系统噪声矩阵;H是系统量测矩阵;γ是随机向量,用于表示故障的大小;ρ(k,φ)是如下分段函数:

式中,φ为故障发生时间。
式中,δ(k, j)为克朗尼克δ函数。
1.2 残差χ2检测法
k时刻系统状态的递推值和量测的预测值计算公式分别如下[11]:
式(6)中,γ(k)在卡尔曼滤波器中称为新息(即残差),γ(k)的方差可用下式表示:

定义系统故障检测函数为

设定故障检测的门限值为TD,此时系统故障检测过程可描述为:
1.3 状态χ2检测法
状态χ2检测法的思路是利用两个状态估计之间的差异来进行检测的。是由系统量测值Z(k)经过卡尔曼滤波得到,因此和测量信息有关,会受到系统故障的影响;则是由所谓的状态递推器用先验信息递推计算求得,因此和量测信息无关,不受系统故障的影响。所以,利用之间的差异便可以对系统故障进行有效的检测和隔离。均为高斯随机向量(因为X(0)是高斯随机向量)。估计误差e1(k)和e2(k)的定义如下:
同时定义:

β(k)的方差表示为:

故障检测函数定义为:

故障判断准则为:
1.4 双状态χ2检测法
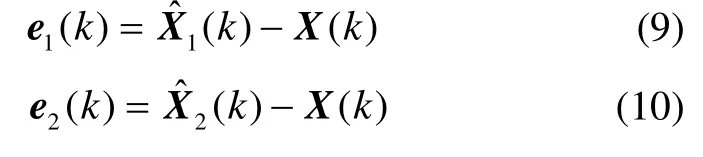
双状态χ2检测法采用两个状态递推器交替地使用卡尔曼滤波器的状态估值和协方差阵重置[9],并交替地用作故障检测参考系统。其原理结构图如图1所示。
图1中,开关K1起重置状态递推器的作用,开关K2用来切换两个状态递推器。K1和K2在不同时间段的操作和实现的功能如表1所示。
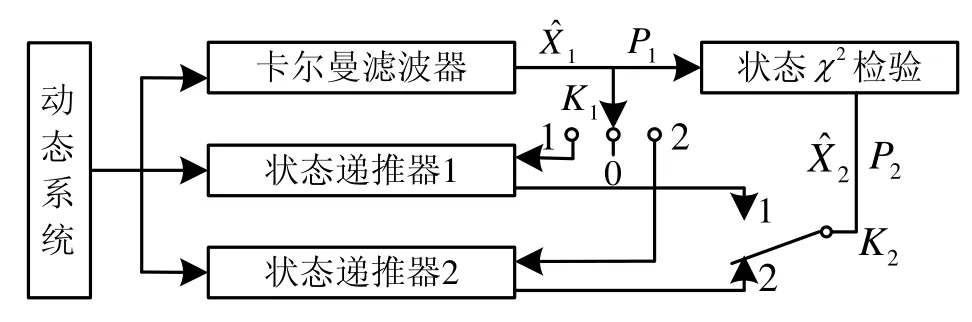
图1 双状态递推器故障检测原理结构图Fig.1 Fault detection structure of dual-state recursive
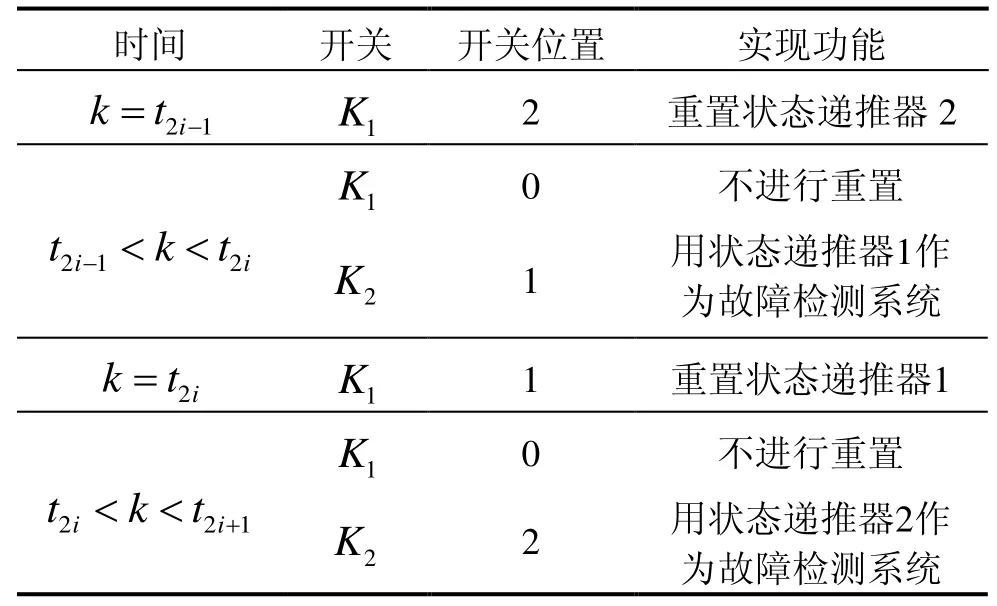
表1 开关K1和K2在不同时间段的操作及功能表Tab.1 Operations of witch K1 and K2 in different time periods
1.5 传统状态χ2检测法性能分析
残差χ2检验法对于硬故障检测效果要比对软故障的检测效果好得多。因为软故障刚开始出现时由于其值很小而不易被检测出来,但是带有故障的输出将会影响到预测值,造成残差γ(k)一直都比较小,因此很难用γ(k)来检测系统的软故障。
状态χ2检测法对软故障的检测更加灵敏。其缺点是,由于在“状态递推器”中没有进行量测更新,所以这些误差将造成状态递推值偏离真实值越来越远,直接降低了系统故障检测的灵敏性。
双状态χ2检测法通过采用两个状态递推器交替使用避免了一个已经受污染的状态递推器作为系统故障检测的参考系统的问题,但两个状态递推器交替工作的时间间隔Δt 的选择尤其重要。如果Δt选择过小,则在系统发生故障时,经过状态递推器两次重置仍可能未被检测出来,因此两个状态递推器都会受到污染;如果Δt 选择过大,则由于状态递推器随时间增长会引起方差增大、精确性降低的问题,容易产生虚警。
2 基于混合χ2检测法的故障检测方法
上面对残差χ2检验法、状态χ2检验法和双状态χ2检验法的故障检测原理及优缺点进行了详细的分析,在此基础上,本文提出了一种新的故障检测方法即混合χ2检验法。该方法综合了残差χ2检验法和双状态χ2检验法的优点,利用两者相互配合对动态系统进行故障检测,弥补了两种方法的不足。
2.1 混合χ2检测法算法流程设计
混合χ2检测方法中用到的残差χ2检验法和双状态χ2检验法共同使用同一个卡尔曼滤波器,同时残差χ2检验法的检测结果决定了对双状态χ2检验法的两个状态递推器的操作:当残差χ2检验法检测到组合导航系统故障时,则通过对控制开关的控制不允许卡尔曼滤波结果对双状态χ2检验法的两个状态递推器进行状态重置;反之,如果通过残差χ2检验法检测组合导航系统正常,则通过对控制开关的控制允许卡尔曼滤波结果对双状态χ2检验法的状态递推器进行状态重置。组合导航系统最终的故障检测结果由残差χ2检测法和双状态χ2检测法的检测结果共同决定。
混合χ2检验法的原理结构图如图2所示。
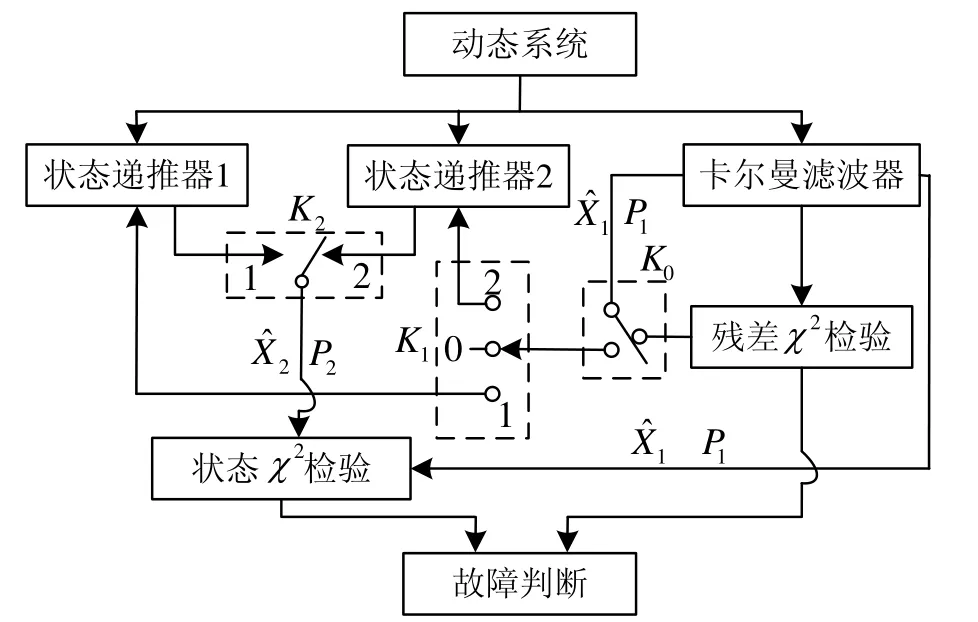
图2 混合χ2检测法原理结构图Fig.2 Principle structure diagram of hybrid χ2 test method
2.2 混合χ2检测法故障诊断准则
由于混合 χ2检验法在卡尔曼滤波器对双状态 χ2检验法状态递推器进行重置前加入了残差χ2检验,避免了系统故障对状态递推器的污染,增强了系统的可靠性。
故障判断准则:
① 残差χ2检验法和双状态χ2检验法检测的结果都为故障,则确定系统为故障;
② 残差χ2检验法和双状态χ2检验法检测的结果都为正常,则确定系统为正常;
③ 残差χ2检验法检测系统正常而双状态χ2检验法检测系统为故障,则确定系统出现了软故障;
④ 残差χ2检验法检测系统故障而双状态χ2检验法检测系统为正常,则需进一步判断,以确定系统出现虚警还是故障。
通过在双状态χ2检验法前加入残差χ2检验法对系统进行检测,降低了双状态χ2检验法对两个状态递推器交替工作的时间间隔Δt 的要求,降低了虚警率,提高了故障检测的准确率。
3 仿真分析
3.1 仿真条件
本文分别对残差χ2检验法、状态χ2检验法、双状态χ2检验法和混合χ2检验法进行仿真试验。假设整个仿真试验中SINS是可靠无误的,GPS在某一时间段内发生故障,其精度出现下降情况,具体仿真条件如表2所示,仿真用到的载体轨迹如图3所示。
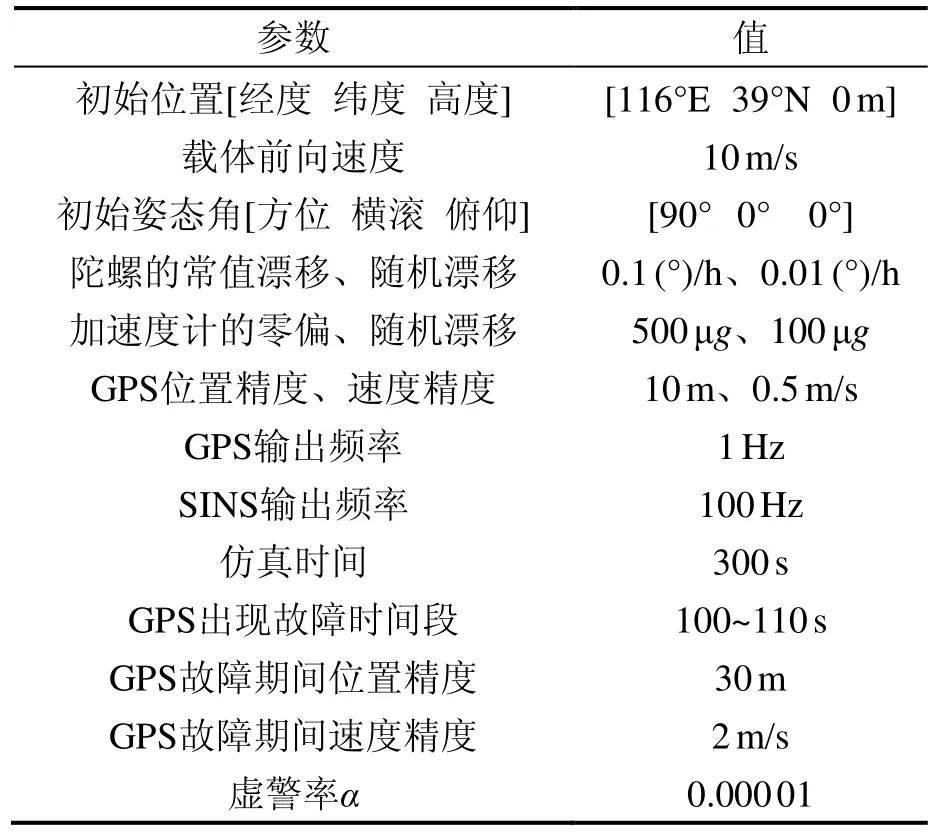
表2 仿真条件设置Tab.2 Setting of simulation condition
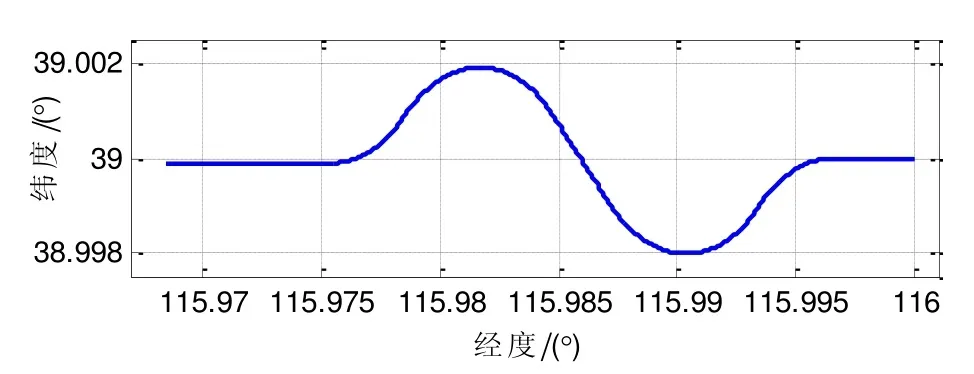
图3 仿真使用轨迹Fig.3 Trajectory used by simulation
3.2 仿真结果及分析
根据表2虚警率α的设置,可通过χ2分布表求得门限值,然后根据残差χ2检验法故障检测函数求解公式(8)可得如图4所示;根据状态χ2检验法故障检测函数求解公式(13)可得图5所示;双状态χ2检验法故障检测函数如图6所示。混合χ2检验法在原理上是根据残差χ2检验法和双状态χ2检验法的故障检测函数进行综合判断处理。
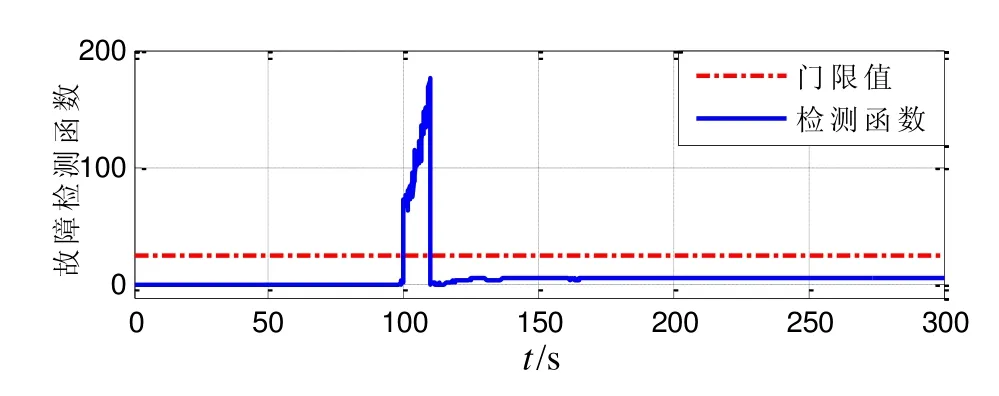
图5 状态χ2检测法故障检测函数及门限值曲线Fig.5 Fault detection function and threshold curve of the state chi-square test method

图6 双状态χ2检测法故障检测函数及门限值曲线Fig.6 Fault detection function and threshold curve of the double state chi-square test method
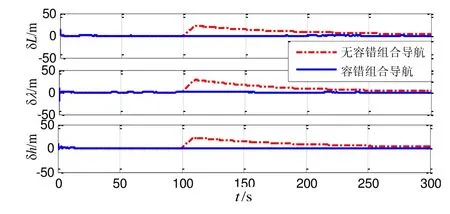
图7 有无容错处理时组合导航位置误差比较Fig.7 Position error of integrated navigation system

图8 有无容错处理时组合导航速度误差比较Fig.8 Speed error of integrated navigation system
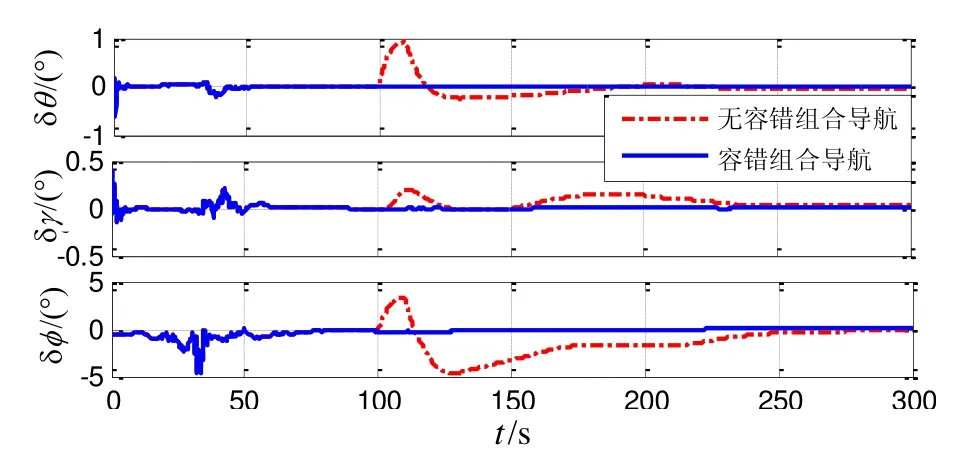
图9 有无容错处理时组合导航姿态误差比较Fig.9 Attitude error of integrated navigation system
从图7~9仿真结果中可看出:在0~100 s时间段内,SINS/GPS组合导航系统正常工作;但在100 s时GPS开始出现故障,在出现故障后,容错组合导航系统对故障传感器即GPS的信息进行了隔离,采用捷联惯导进行单独导航解算。从图7~9中实线可以看出:在GPS出现故障的100~110 s间,导航结果略有下降但不会影响导航系统的正常使用;从110 s后GPS故障消失,系统又恢复正常,因此重新对SINS/GPS进行了组合,迅速对捷联惯导的导航误差进行了修正。但是无容错组合导航系统在 GPS出现故障期间仍对SINS/GPS进行组合,因此在100~110 s期间导致了组合导航结果的严重下降,如图7~9虚线所示,从110 s后GPS故障消失,组合导航估计误差又开始慢慢收敛。
4 结 论
本文在分析了残差χ2检验法、状态χ2检验法和双状态χ2检验工作原理及优缺点的基础上,提出了混合χ2检验法。该方法中残差χ2检验法和双状态χ2检验法并行工作且共用同一个卡尔曼滤波器,同时残差χ2检验法的检测结果决定了对双状态χ2检验法的两个状态递推器的操作:当残差χ2检验法检测到组合导航系统故障时,则通过控制开关使卡尔曼滤波结果不对两个状态递推器进行状态重置;反之,如果残差χ2检验法检测系统正常,则允许卡尔曼滤波结果对状态递推器进行状态重置。因而该方法有效地解决了残差χ2检验法对软故障不敏感的问题和双状态χ2检验法的两个状态递推器易受污染的问题。组合导航系统故障诊断结果由残差χ2检测法和双状态χ2检测法共同决定。通过仿真分析,证明该方法能有效地降低组合导航系统的虚警率,提高组合导航系统故障诊断的准确性和可靠性。
(References):
[1]Zhao Xin, Wang Shi-cheng, Zhang Jin-sheng, et al. Realtime fault detection method based on belief rule base for aircraft navigation system[J]. Chinese Journal of Aeronautics, 2013, 26(3): 717-729.
[2]Antonino-Daviu J A, Pons-Llinares J, Lee Sang Bin.Advanced rotor fault diagnosis for medium-voltage induction motors via continuous transforms[J]. IEEE Transactions on Industry Applications, 2016, 52(5): 4503-4509.
[3]Horváth K, Blesa J, Duviella E. Sensor fault diagnosis of inland navigation system using physical model and pattern recognition approach[C]//IFAC Proceedings. 2014:5309-5314.
[4]王立冬, 车琳, 鲁军, 等. 基于改进型灰色预测模型的SINS/GPS组合导航系统[J]. 中国惯性技术学报, 2015,23(2): 248-252.Wang Li-dong, Che Lin, Lu Jun, et al. SINS/GPS integrated navigation system based on improved grey forecasting model[J]. Journal of Chinese Inertial Technology,2015, 23(2): 248-252.
[5] 程洪炳, 倪世宏, 黄国荣, 等. 残差χ2检验法在联邦滤波中的应用[J]. 自动化仪表, 2012, 33(3): 9-13.Cheng Hong-bing, Ni Shi-hong, Huang Guo-rong, et al.Application of residual error χ2test method in federated filter[J]. Process Automation Instrumentation, 2012, 33(3):9-13.
[6]Feng Yang, Cheng Cheng, Quan Pan. Practical integrated navigation fault detection algorithm based on sequential hypothesis testing[J]. Journal of Systems Engineering and Electronics, 2011, 22(1): 146-149.
[7]Yejun Xu, Lei Chen, Kevin W. Li. A chi-square method for priority derivation in group decision making with incomplete reciprocal preference relations[J]. Information Sciences, 2016, 306: 166-179.
[8]Kakizawa Y. Improved chi-squared tests for a composite hypothesis[J]. Journal of Multivariate Analysis, 2012, 107:141-161.
[9]Gospodinov N, Kan R, Robotti C. Chi-squared tests for evaluation and comparison of asset pricing models[J].Journal of Econometrics, 2013, 173(1): 108-125.
[10]Lei Zhang, Bo Xu. Architecture analysis of the simplified libration point satellite navigation system[J]. Advances in Space Research, 2016, 58(7): 1275-1287.
[11]赵欣, 张金生, 刘志国. 基于自适应滤波辅助残差 χ2法的导航系统故障诊断方法[J]. 解放军理工大学学报(自然科学版), 2012, 13(5): 490-496.Zhao Xin, Zhang Jin-sheng, Liu Zhi-guo. Fault diagnosis method based on residual chi-square assisted by adaptive filter for navigation system[J]. Journal of PLA University of Science and Technology (Natural Science Edition),2012, 13(5): 490-496.
[12]靳星, 宋华, 邱红专, 等. 基于 Fuzzy ARTMAP的GPS/INS组合导航系统故障诊断[J]. 宇航学报, 2011,32(9): 1902-1910.Jin Xing, Song Hua, Qiu Hong-zhuan, et al. Fuzzy ARTMAP based fault diagnosis approach for GPS /INS navigation system[J]. Journal of Astronautics, 2011, 32(9):1902-1910.
Application of hybrid chi-square test method in fault detection of integrated navigation system
ZHANG Hua-qiang, LI Dong-xing, ZHANG Guo-qiang
(School of Mechanical Engineering, Shandong University of Technology, Zibo 255049, China)
In order to improve the reliability of an integrated SINS/GPS navigation system, a hybrid chi-square test method is proposed based on the analysis of the residual chi-square test method and the double-state chi-square test method. In this method, the residual chi-square test method and the double-state chi-square test method work in parallel, and both of them share the same Kalman filter at the same time. The operation of two state propagator in the double-state chi-square test method is determined by the results of the residual chi-square test method: when the fault of the integrated navigation system is detected by the residual chi-square test method, the navigation system will make the Kalman filter’s result not reset the state of the two state propagators by a control switch; on the contrary, if the navigation system is detected well by the residual chi-square test method, the navigation system will allow the Kalman filter’s result to reset the state of the two state propagators by a control switch. This method can effectively solve the problem that the residual chi-square test method is not sensitive to the soft fault and the two state propagators of the doublestate chi-square test method are easily polluted. The fault diagnosis result of the integrated navigation system is determined by both the residual chi-square test method and the double state chi-square test method.Simulation experiment analysis shows that this method can reduce the false alarm rate, and effectively improve the veracity and reliability of the integrated navigation system’s fault diagnosis.
integrated navigation system; hybrid Chi-square test method; state propagator; fault diagnosis
TP183
A
1005-6734(2016)05-0696-06
10.13695/j.cnki.12-1222/o3.2016.05.024
2016-06-23;
2016-09-08
国家自然科学基金(61302162);山东省自然科学基金(ZR2015FL012);山东省高等学校科技计划项目(J14LN76)
张华强(1982—),男,博士,讲师,从事检测与导航技术研究。E-mail: huaqiang.zhang@163.com
猜你喜欢
建材发展导向(2021年19期)2021-12-06
电脑爱好者(2020年11期)2020-07-29
现代农业科技(2019年19期)2019-11-21
电脑爱好者(2019年17期)2019-10-30
快乐作文(5.6年级)(2019年5期)2019-09-10
汽车维修与保养(2019年5期)2019-08-21
统计与决策(2019年7期)2019-05-05
现代法学(2018年1期)2018-02-02
暨南学报(哲学社会科学版)(2016年11期)2016-11-26
哈尔滨理工大学学报(2016年3期)2016-11-05
