
分辨率差异较大的遥感图像自动配准算法研究
2014-07-31 23:10郎博刘彦君桂维振蒋雯
影像技术 2014年4期
郎博,刘彦君,桂维振,蒋雯
(北京工业职业技术学院,北京100042)
分辨率差异较大的遥感图像自动配准算法研究
郎博,刘彦君,桂维振,蒋雯
(北京工业职业技术学院,北京100042)
本文在研究了已有配准算法的基础上,针对两个分辨率差异较大的遥感图像,提出了自动配准的改进方法,自动获取基准影像,并对每个波段的图像做直方图均衡化增强,最后,构建影像金字塔,运用SIFT算法提取特征点。
自动配准;图像特征点;SIFT算法
图像配准是遥感图像镶嵌、图像融合的重要步骤之一,配准的精度对后续图像处理产生重要的影响,而当前遥感图像自动配准的主要困难,在于遥感图像特征点提取的自动化程度不高,而且计算速度较慢。本文提出了运用改进的SIFT算法提取特征点,首先自动获取基准影像,其次,对每个波段的图像做直方图均衡化增强,再构建影像金字塔,并逐波段、逐层运用SIFT算法提取特征点,剔除错误的匹配点,用三次多项式实现精确配准。
1 基本原理
1.1 SIFT特征匹配算法
SIFT特征匹配算法包括两个阶段,第一阶段是SIFT特征的生成;第二阶段是SIFT特征向量的匹配,总共包括4步。
①尺度空间极值检测,主要是为了寻找到尺度空间的极值点,首先将图像进行高斯金字塔分解,然后逐层进行差分,得到DOG金字塔,最后在DOG金字塔的基础上检测尺度空间的极值点,如图1所示。

图1 在DOG尺度空间检测极值点
②精确定位特征点和确定主方向,由上一步骤找到的极值点是非常粗略的,需要经过进一步检验提高精度。这里,利用三维二次函数拟合精确确定特征点位置和尺度,删除低对比度的点和边缘点,提高特征点的精度,同时匹配稳定性和抗噪声能力也得到了一定程度的增强。
确定了关键点的位置后,利用特征点邻域像素点的梯度方向分布特性来计算特征点的方向。公式如下:

式中一m(二 x, y三)表示在坐标一(x, 三y)位置上像素梯度的模值,一(二x, y三)则表示其梯度的方向,L为所用的尺度。实际计算中,邻域像素点梯度的模值一m 和方向一用直方图来表示(如图2)。
③SIFT特征向量的生成:通过以上步骤,获得了特征点的位置、所处尺度和方向,由此可以确定一个SIFT特征区域。

图2 由关键点邻域梯度信息生产特征向量
首先,将坐标轴调整至与关键点方向一致,以确保旋转不变性。如图2左图所示,中心红色点为关键点,以其为中心取8×8的窗口,黑色箭头为该像素点的梯度方向(箭头长短表示梯度模值的大小),红色圈代表高斯加权的范围(离红色关键点越近的像素点,其梯度信息的作用越大)。
④SIFT特征点匹配,经过上述三个步骤之后生成了两幅影像的SIFT特征向量,随即须进行相似性程度的判断。本文用特征点的欧氏距离的最近距离和次近距离比作为特征点匹配的判定标准。
1.2 参考影像的自动搜索
一般的遥感影像配准系统是通过人工选择待配准影像的参考影像,这种方法自动化的程度不高,本文系统实现基准影像的自动寻找。首先,建立参考影像的数据库,将已经纠正好的全国环境星数据存储在数据库中,并且建立全国环境星的索引,在索引中包括每景环境星影像的四个角点经纬度坐标和中心点的经纬度坐标,其算法的基本思想是:
①输入待配准影像,计算其中心点坐标,设为一R(二 x, 三y )。
②计算一R( 二x, 三y)到影像的四个角点的距离,分别记为为圆心,以一D为半径做圆。
③遍历数据库中所有参考影像的中心坐标,找到中心点落在②中所述的圆中影像,记为


④计算待配准影像中心点一R( x二, y)三和③中遍历所得参考影像中心点坐标


欧式距离最小的影像就是最佳的基准影像。
2 特征点提取关键技术
在单个波段内,像素间灰度值的差异小,对于特征信息的表达不充分。遥感图像尺寸大,而且存储方式不局限于单字节,同时,如果单纯的切分图像,容易造成图像有效信息的割裂,降低特征信息的表达能力。针对遥感影像以上特点,对于两张独立的遥感图像,特别是两张分辨率差异较大的图像,对本文特征点提取的算法的分析如下。
首先,依据地理坐标信息,搜索出同一个区域,获取两张遥感图像的处理范围。
其次,各个对应波段运用直方图均衡化对图像增强,然后独立的提取同名点,分别用SIFT算法获取各对应波段的同名点对,再合并所有同名点对,本文加载的是影像的RGB以及红外四个波段。
3 图像配准技术流程
本文主要是利用SIFT算法提取特征点,首先输入待配准的影像,通过自动搜索基准影像功能系统自动加载基准影像,然后进行特征点的提取、粗匹配、错误匹配点剔除以及精匹配,最后,将本文算法配准后的结果和Erdas的配准结果做比较分析,如果精度合格,将配准后的结果存储到数据库中,如图3所示。

图3 配准结果流程
4 实验结果及分析


分辨率,所用的无人机遥感影像是该地区的0.1m的海南影像,以geoeye影像为基准影像,无人机影像为待配准影像。分别用本文算法和ERDAS软件进行配准分析。
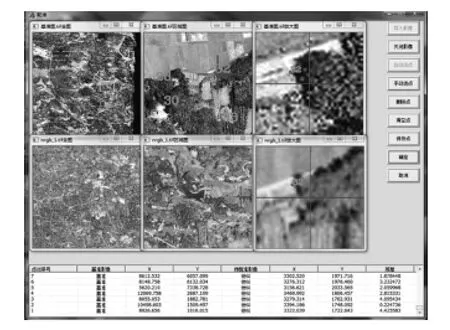
图4 特征点分布

图5 配准后拼接

图6 Erdas提取的特征点分布
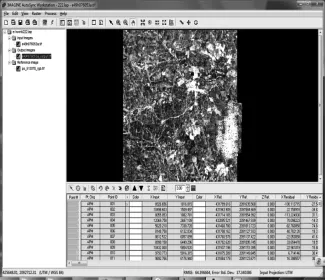
图7 配合后拼接
视觉结果:

图8 本文算法配准结果
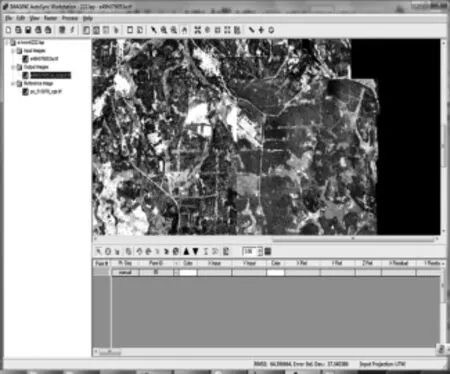
图9 ERDAS软件配准结果
均方差比较:

表1 均方差分析
配准时间分析:
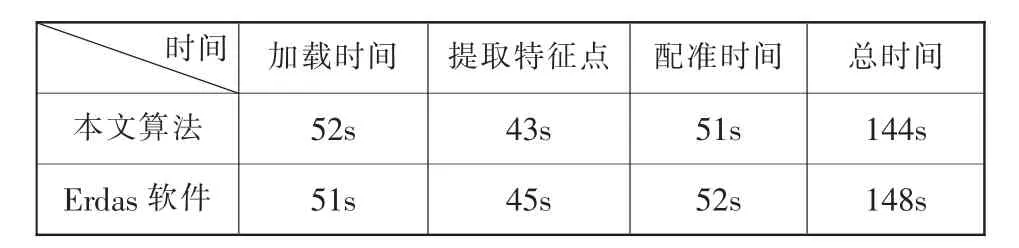
表2 时间分析表
5 总结
通过上述实验分析,本文所用的遥感图像自动配准算法和其他的图像软件相比提高了图像配准的精度,对不同时相、分辨率差异较大的两幅影像实现较好的配准。
[1]张祖勋,张剑清,廖明生.遥感影像的高精度自动配准[J].武汉测绘科技大学学报,1998(4):320-323.
[2]Zhang Jixian,Li Guosheng,Zeng Yu.The Study on Automatic and High-precision Rectification and Registration of Multisource Remote Sensing Imagery[J].Journal of Remote Sensing,2005,9(1):73-77.
[3]Lowe D G.Distinctive Image Features from Scale Invariant Keypoints[J].International Journal of Computer Vision, 2004,60(2):91-110.
[4]张祖勋,张剑清.数字摄影测量学[M].武汉:武汉测绘科技大学出版社,1996:144-174.
[5]Lowe D G.Object recognition from local scale-invariant features[C].In ICCV,1999:1150-1157.
[6]张继贤,李国胜,曾钰.多源遥感影像高精度自动配准的方法研究[J].遥感学报,2005,9(1):73-77.
P237;TP751
A
10.3969/j.issn.1001-0270.2014.04.21
2014-03-03
猜你喜欢
航天返回与遥感(2022年2期)2022-05-12
计算机技术与发展(2020年8期)2020-08-12
电脑报(2020年12期)2020-06-30
化工设计(2020年6期)2020-01-13
电脑报(2019年4期)2019-09-10
劳动保护(2018年8期)2018-09-12
电子制作(2018年2期)2018-04-18
制导与引信(2017年3期)2017-11-02
西藏科技(2015年4期)2015-09-26
大众摄影(2015年9期)2015-09-06
