
一种改进型陆标定位系统的研制
2014-07-31 20:20张长辉王雪晴
舰船科学技术 2014年7期
张长辉,赵 柯,王雪晴
(镇江船艇学院,江苏 镇江 212003)
一种改进型陆标定位系统的研制
张长辉,赵 柯,王雪晴
(镇江船艇学院,江苏 镇江 212003)
传统的陆标定位,采用人工观测、手工绘算的方式,在纸制海图上标绘船位点。这样定位速度缓慢,精度不高,所得出的船位信息无法自动输入到ARPA雷达等现代导航设备中去进行辅助运算。本文提出将现有的陆标定位进行数字化改造,利用现代传感器与舰载电子海图技术相结合,研制出一种改进型的陆标定位系统,该系统的实现可以有效地解决船艇在复杂电磁环境下的导航定位问题。
复杂电磁环境;导航系统;陆标定位
0 引 言
未来的信息化战争将是“陆、海、空、天、电”五维一体的立体化战场,数量庞大、体制复杂、种类多样、功率大的电子信息装备的大量使用,使得战场空间中的电磁信号非常密集,形成极为复杂的电磁环境[1]。在这样环境下,船艇现有的主要导航定位装备,除了不依赖于电磁波工作的磁罗经和电罗经之外,其他几种主要装备由于受其本身工作原理的限制,均会受到不同程度的影响[2]。而磁罗经和电罗经主要用于陆标定位,它的定位原理是与电磁环境无关的平面几何原理,所以利用传统的陆标定位进行复杂电磁环境下的船艇导航定位,具有先天上的优越性[3]。但是由于以往技术条件上的限制,上述定位手段大都采用人工观测、手工绘算的方式,在纸制海图上标绘船位点,所以定位速度缓慢,精度不高,所得出的船位信息无法自动输入到ARPA雷达等现代导航设备中去进行辅助运算。因此,本文提出将现有的陆标定位进行数字化改造,利用现代传感器与舰载电子海图技术相结合,研制一种改进型的陆标定位系统。
1 系统总体设计
由陆标定位原理可知:陆标定位主要是通过测定2个或3个所观测物标的磁方位、物标之间的夹角以及物标高度等要素,进行简单绘算后确定船位。因此,本系统在设计上由绘算部分与观测部分组成[4]。其中观测部分包括伺服平台、图像传感设备、测角系统等;绘算部分包括数据处理中心以及电子海图上层软件。其整体结构如图1所示。
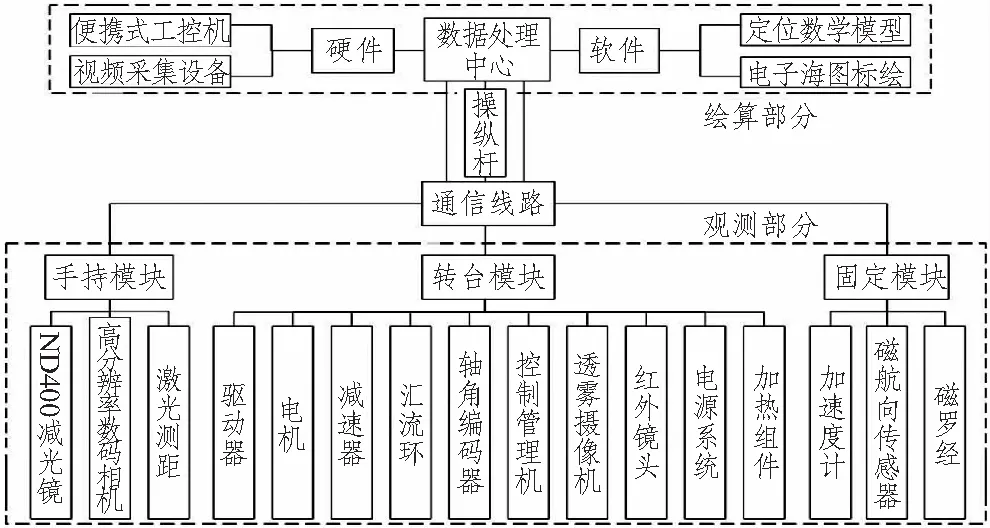
图1 系统组成框图Fig.1 The system composition block diagram
图1中,观测部分主要由手持模块、转台模块和固定模块组成,其中转台模块是设计安装在指挥台上四周空旷的位置,其主要作用是通过船用伺服转台,结合由透雾摄像机和红外镜头组合而成的视频系统,在驾驶室内遥控实现对船艇周围海况N×360°任意方位快速观察的同时,完成当前视野图像的实时传输与采集,并对视野中的任意目标相对船首方向的舷角大小进行自动化高精度测量,为船艇进行快速定位提供关键信息,这次本系统的核心部分。手持模块是根据设备本身对工作环境稳定性的依赖性,相对船载转台完全独立设计的一个部分,可以在指挥台或者驾驶室内由用户手持使用。该部分的主要在用户手持的相对稳定条件下,对5 n mile(约10 km)范围内的陆标进行激光测距。固定模块是相对船艇本身固定而言,该部分主要包括磁航向传感器(配合船载磁罗经使用)和安装在船艇首尾和正横方向上的1组加速度计,分别用来传感船艇罗航向和船艇水平加速度,以供推算船位使用[5]。
绘算部分安装在驾驶室内,主要包括便携式军用工控机、操纵杆、视频采集设备和电子海图等软件系统。该部分的作用是控制伺服转台的运动、获取前端部分各种传感器的回传信息、对所有信息进行综合运算处理、根据数学模型计算出船艇位置并在电子海图上自动标绘。
2 关键部分的技术实现
由系统总体设计可知,本系统中的关键部分是转台模块。
2.1 转台模块的总体设计
转台模块由方位座和俯仰包两部分组成,包括方位轴系、俯仰轴系、驱动器、编码器、轴承、汇流环、限位装置、电子线路以及密封环节等。系统的总体结构如图2所示。
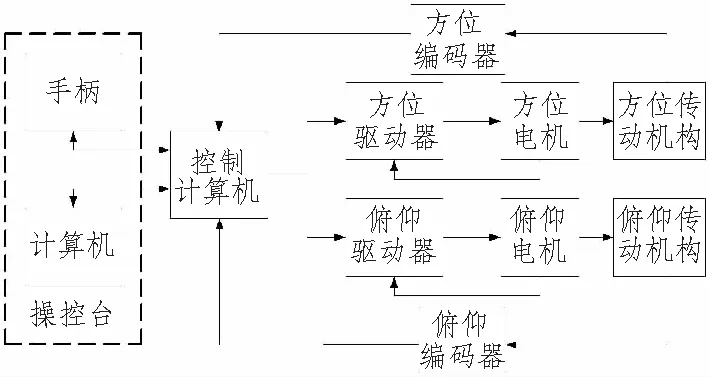
图2 转台模块设计图Fig.2 The design of turntable module
平台的方位和俯仰传动机构由支座,滚珠轴承,空心轴等组成,在其上安装有电机转子和角度测量单元,在俯仰传动轴上固定有支架,用于安装透雾摄像机和红外镜头等组件。通过支架调整装置进行调整以达到传感器光轴与俯仰轴垂直。球型头由方位轴支撑,其俯仰方向的旋转由俯仰伺服传动电机驱动。方位轴中嵌有小型汇流环。汇流环保证经过方位机械传动实现内外部电气(电源、操控、状态、视频)信息的互连。方位、俯仰轴系通过密封环节严密水密,球形本身严格气密,以保证内部各元器件的正常工作。
2.2 转台模块的控制原理
系统接收来自操控台的手柄或计算机的控制指令控制转台运动,采用测速编码器反馈构成速度闭环,接收控制计算机经D/A变换输出的模拟控制电压,进行速度调节,方位编码器和俯仰编码器实时传递方位角度信息和俯仰角度信息给控制计算机,控制计算机通过串口上报转台角度信息给操控台上位机。另外在俯仰的极限位置装有电器止档和机械止档,控制计算机的程序中还设有软件限位功能,伺服转台控制系统原理如图3所示。
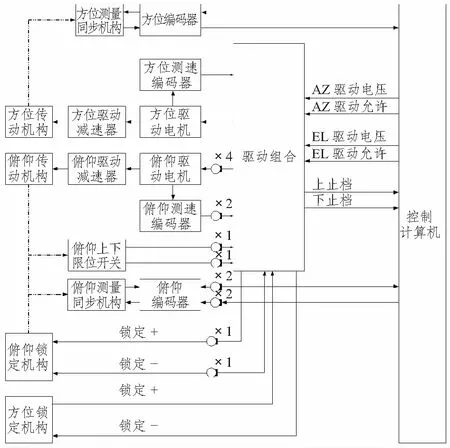
图3 伺服转台控制系统原理Fig.3 The control systems of servo turntable
2.3 控制计算机
控制计算机是转台模块控制的中心,它的功能主要包括2个方面:一是根据不同的指令进行相应的操作控制,它包括开启与闭合系统,调节传感器,控制方位、俯仰旋转等;二是能完成平台内部的数据处理功能,如伺服系统控制、D/A及A/D变换。
伺服转台通过地址逻辑译码电路分别选通,采用FPGA进行逻辑控制与DSP进行总线扩展接口,实现外部的复杂逻辑控制。控制计算机的硬件结构如图4所示。
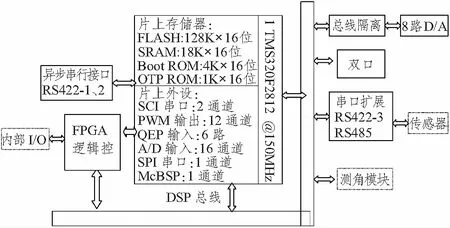
图4 控制计算机的硬件结构图Fig.4 The hardware structure of control computer
2.4 测角单元
测角线路的功能是测量传感器图像所处的舰船坐标系的高度和方位角。为伺服系统提供角位置反馈信息,形成位置闭环。
测角单元包括俯仰测角和方位测角,二路测角原理和组成相同,包括角度传感器(光电-绝对值式轴角编码器),信号激磁电路,粗/精RDC转换电路,粗/精组合纠错电路,时序发生电路,数据输出缓冲电路等组成。其原理如图5所示,旋转变压器正余弦信号,经RDC电路转换成数字量形式,经组合编码后,得出舰船坐标系的高低角和方位角。

图5 测角单元原理框图Fig.5 The principle of angle measurement
2.5 操控单元方案
操控单元由操纵杆、键盘和数据处理电路组成。操纵杆上的压力传感器和电压转换电路,提供驱动稳定平台方位和俯仰运动的电压偏差量信息;通过两路A/D转换器转换为数字量由单片机读入,通过异步串行接口发送给控制管理模块。键盘主要用于控制系统的状态,键盘命令也通过串行接口发送给控制管理模块。当压力传感器左右压动时,电压值通过运算放大器放大后,送给模/数转换器进行模数转换,转换后的数字量经单片机处理,通过RS232或者RS422串行口以规定的报文格式输出。
3 基本原理
本系统中在获取物标之间的水平角时,采用了一次成像法。所谓一次成像法就是针对小于70°的物标夹角,通过一次成像的方式,获取2个物标在同一幅数码照片里所处的位置,通过计算,得到2个物标之间的夹角。这种方法与传统的测角法相比,能够最大程度上消除了分步测量所带来的动态误差,并且只需要2个待测物标同时出现在成像范围之内即可,对瞄准的准确度要求不高,却能保证较好的测量精度。
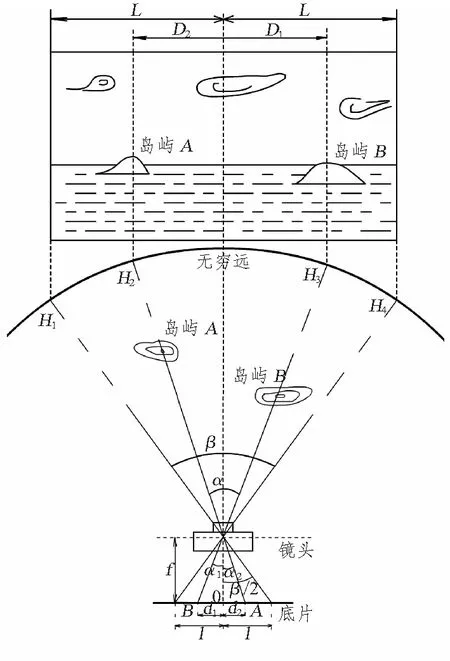
图6 一次成像法角度测量原理图Fig.6 The principle of angle measurement with once imaing
可通过图6说明一次成像法的理论推导。利用相机对物标A、物标B进行一次成像,则图中物标A、物标B在镜头后面底片上的成像点分别为A点和B点,假定这两点与底片中心线之间的横向距离分别为d2和d1,底片中心线到底片横向外沿的距离为l,那么根据图示不难得出:

也即:


式中,L为数码相片横向象素点数量;D1和D2为相片中物标点偏离相片中心线的象素点数量。β角可以预先测量得到。所以,要测量物标A、物标B相对于摄像机镜头的夹角大小,只需要在事先测得β角的前提下,从数码相片上量出物标A、物标B的像偏离相片中心线的象素点值,即可根据上述公式计算出角α。
4 系统误差分析[6]
该系统所采用陆标定位方法主要有两标方位定位、三标方位定位、三标两角定位、两标距离定位等。在以上诸定位方法中,应用到的船位线主要有方位船位线、距离船位线、水平角船位线。
只要知道观测值均方差,根据物标与船位之间的距离或两物标间的距离,即可得到船位线的均方差。

两标方位船位的均方误差圆半径为:

三标两角船位的均方误差圆半径为:
式中:mα为观测水平角均方差,(′);θ为两船位线夹角;DA、DB、DC分别为观测船位到左、中、右标的距离,n mile;DAB和DBC分别为左标与中标、中标与右标之间的距离,n mile。
两标距离船位均方误差圆半径为:
三标定位,由3条船位线确定最概率船位,其均方差为:

式中:Ei,i∈[1,3]为各船位线的均方差;θij,i,j∈[1,3],i≠j。
三标方位定位时,则E1=m1D1,E2=m2D2,E3=m3D3。若m1=m2=m3,三标方位定位的最概率船位的均方差为:

三标距离定位时,最概率船位的均方差为:

式中:mD1,mD2,mD3分别为观测三标距离时的均方差。若mD1=mD2=mD3,则
本系统中所采用的测量仪器有磁罗经(磁航向传感器)、电子六分仪和激光测距仪。其中,本导航系统中激光测距仪的测中范围为5 n mile,测距精度约为1 m;电子六分仪的测角误差为1″,测水平角的误差为3″,磁航向传感器的精度为6分(0°.1),电子海图屏幕像素为60×60/1024=3′。
本系统测方位时考虑到磁航向传感器的精度,均方差约为±0°.5,罗经差的均方差约为±0°.6,在海图上标绘方位线受屏幕像素影响时均方差为±0°.1,上述各项均为相互独立的误差,故其综合的均方差为

测水平角时,考虑测角误差为0′.6,海图上标绘误差为3′.0,六分仪器差约为1′.0,得到水平角船位线的均方差为


4.1 两标方位定位船位均方误差圆半径
选取系统的最大作用距离(5 n mile)处的物标,设测得的两物标的船位线均方差均为0°.79,并设两方位船位线的夹角为选标要求最不利的角度(30°),则该系统两方位定位时的最大船位误差圆半径为
0.195 n mile=360.6 m。
当物标距离愈近,船位线夹角越接近90°,M值越小。
4.2 三标方位定位船位均方误差圆半径
选取系统的最大作用距离(5 n mile)处的物标,设测得的两物标的船位线均方差均为0°.79,经过分析,当两方位线夹角θ12=160°,θ12=30°,θ13=170°,距离D1=D2=D2=5′.0时,三标方位定位船位均方误差圆半径达到最大值,为M=0.2 n mile。
4.3 水平角定位(三标两角定位)船位均方误差
测角均方误差为3′.2。从水平角定位船位均方误差公式分析,引起船位误差最大值为中标距离远,中标与右标、中标与右标距离近,船位线夹角小于30°或大于150°。经分析以中标距离最远5 n mile,中标与右标2 n mile,中标与右标距离近2 n mile,船位距左标(或右标)为5 n mile,与另一标为4 n mile,船位线夹角达最大150°时分析,代入下式,得水平角定位时最大船位误差为0.029 n mile,约为55 m。

4.4 两标距离定位船位均方误差
综上分析,该系统最大误差在陆标定位允许范围之内,能够满足航海的要求。
5 海上试验与结果分析
为检测本系统在海上航行环境下的工作稳定性、定位精度和定位速度。在海上进行了海试,试验海区和计划航线如图7所示。
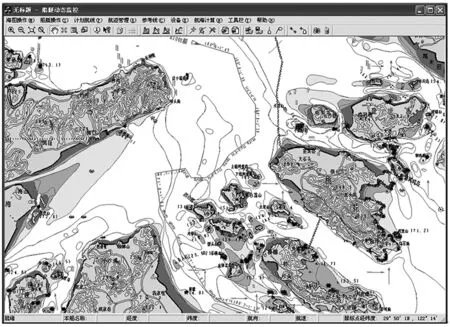
图7 试验航行海区及计划航线Fig.7 The area and planned route of sea trials
通过本系统,分别采用两标方位定位、三标方位定位、三标两角定位、两标距离定位,测得8个船位,同一时刻也用GPS测得船位,用GPS测得船位点和本系统所测得船位点,如表1所示。
表1 GPS所测船位和本系统所测船位比较表
Tab.1 The data of improved terrestrial fixing system and GPS receiver

起始时间/[(°)·(')·(″)]结束时间/[(°)·(')·(″)]实测船位/[(°)·(')·(″)]GPS船位/[(°)·(')·(″)]偏差方向/(°)偏差距离/(nmile)10∶21∶0210∶21∶2729.54.52N122.11.18E29.54.54N122.11.23E65.30.0810∶35∶1510∶35∶4329.53.32N122.11.46E29.53.33N122.11.49E82.60.0510∶45∶1210∶45∶5729.51.26N122.12.22E29.51.26N122.12.24E90.00.0310∶50∶0310∶50∶5129.51.09N122.11.54E29.51.11N122.11.52E318.90.0411∶10∶2011∶10∶5129.49.41N122.09.59E29.49.43N122.09.58E336.70.0311∶13∶5811∶14∶2629.49.41N122.09.16E29.49.41N122.09.15E270.00.0112∶02∶3412∶02∶4029.48.21N122.07.48E29.48.22N122.07.54E77.20.0912∶11∶2312∶11∶4029.47.20N122.08.29E29.47.22N29.47.22N269.70.09
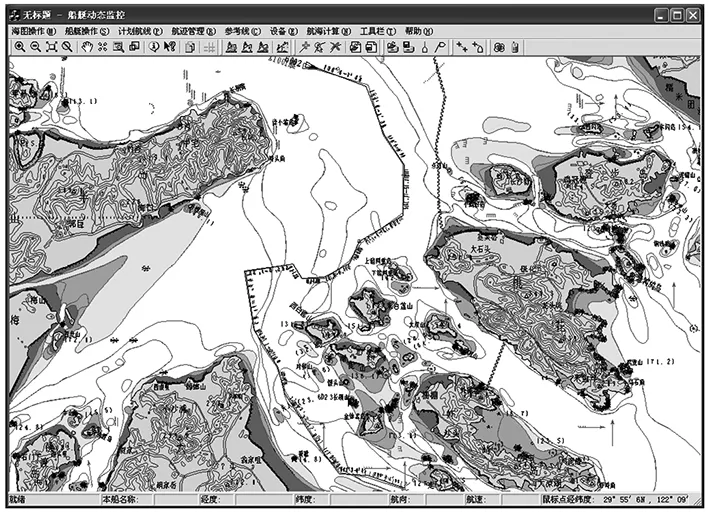
图8 GPS船位和本系统所测船位对比Fig.8 The voyage chart with different navigation methods and GPS receiver
用GPS所测得的航迹与用本系统所测得的航迹叠加如图8所示。通过本次实验可得出以下结论:
1)本系统的硬件设备能够适应船载工作环境,在整个为期一周的实验过程中,没有出现任何故障或异常;
2)本系统能够快速(最快15 s,两标距离定位)、准确(陆标定位误差小于0.1 n mile)地进行航行中的船位测定工作。
6 结 语
针对陆标定位手工操作、定位速度慢等问题,本文提出一种基于现代传感器与舰载电子海图技术的新型导航定位系统的设计方案和技术实现。该系统充分利用了海上各种助航物标先天不易受干扰和破坏的条件,有效地解决复杂电磁环境下船艇的导航定位问题。通过海上实验表明,该系统性能稳定,程序结构设计合理,定位精度满足军事航海上的要求。
[1] 刘军.信息化战场复杂电磁环境对作战的影响[J].西安政治学院学报,2007,4(20):81-83.
LIU Jun.The impact of intricate electromagnetic conditions in informationalized war[J].Journal of Xi′an Politics Institute of PLA,2007,4(20):81-83.
[2] 刘尚合,孙国至.复杂电磁环境内涵及效应分析[J].装备指挥技术学院学报,2008,19(1):1-5.
LIU Shang-he,SUN Guo-zhi.Analysis of the concept and effects of complex electromagnetic environment[J].Journal of the Academy of Equipment Command and Technology,2008,19(1):1-5.
[3] 智利民.航海学[M].北京:解放军出版社,2004.
ZHI Li-min.Navigation[M]. Beijing:PLA Publishing House,2004.
[4] 赵柯.一种船舶定位装置[P].中国专利:ZL 2012 2 0196948.5,2013-01-23.
ZHAO Ke.One ship positioning device[P].Chinese Patent:ZL 2012 2 0196948.5,2013-01-23.
[5] 关政军,陈小凤.磁传感器在航海上的应用[J].大连海事大学学报,2006,32(2):45-48.
GUAN Zheng-jun,CHEN Xiao-feng.Application of magnetic sensor in the field of navigation[J].Journal of Dalian Maritime University,2006,32(2):45-48.
[6] 杭太贵.航行中陆标方位定位精度分析[J].中国水运,2012,12(12):17-18.
HANG Tai-gui.Inaccuracy analysis of terrestrial fixing during voyage[J].China Water Transport.2012,12(12):17-18.
Development of improved terrestrial fixing system
ZHANG Chang-hui,ZHAO Ke,WANG Xue-qing
(Zhenjang Watercraft College,Zhenjang 212003,China)
In traditional terrestrial fixing, people plotted the ship′s position on the paper chart through daily observation and hand painting.This causes the slow positioning speed,the low accuracy and that the ship′s position information cannot be input automatically into the ARPA radar and other modern navigation equipments to fulfill the auxiliary operations.The article suggests that the existing terrestrial fixing system should carry out digital transformation,during which modern sensors and shipboard electronic chart technology can be combined to use.Thus an improved terrestrial fixing system can be developed to effectively solve the watercraft′s navigation and positioning in a complex electromagnetic environment.
complex electromagnetic environment;navigation system;terrestrial fixing
2013-04-01;
2013-05-28
张长辉(1981-),男,硕士,讲师,从事船艇航海技术研究。
U675.79
A
1672-7649(2014)07-0131-06
10.3404/j.issn.1672-7649.2014.07.028
猜你喜欢
无人系统技术(2022年1期)2022-03-24
幼儿园(2021年12期)2021-11-06
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
广东造船(2019年6期)2019-02-12
初中生世界·九年级(2017年10期)2017-11-08
证券市场周刊(2017年3期)2017-04-01
火控雷达技术(2016年2期)2016-02-06
小学生时代·大嘴英语(2015年7期)2015-11-23
