基于扭矩传感器的汽车驱动轮最佳滑转率测定
2014-07-24 05:51:58李志远侯顺艳李贺
河北大学学报(自然科学版) 2014年5期
李志远,侯顺艳,李贺
(1.河北大学 质量技术监督学院,河北 保定 071002;2.河北大学 电子信息工程学院,河北 保定 071002)
驱动轮最佳滑转率是指驱动轮与地面之间的附着系数和滑转率关系曲线上附着系数处于峰值处对应的滑转率.汽车加速时,若驱动轮滑转率处于最佳滑转率附近,地面能够给汽车提供最大的纵向力和较大的侧向力,使汽车具有较好的纵向加速性能和侧向稳定行驶能力[1].汽车驱动防滑控制系统就是以汽车驱动轮最佳滑转率为控制目标,通过调节发动机输出功率和给驱动轮施加制动等方式控制汽车在起步和加速时驱动轮过度滑转的主动安全控制系统.因不同路面条件对应不同的最佳滑转率,因此辨识路面特性,确定驱动轮在低附着路面的最佳滑转率对于汽车驱动防滑控制非常重要.
目前,路面识别的方法主要有3种:1)通过仪器直接对路面附着系数进行测量.该方法效果较好,但该方法是基于汽车制动工况,测试过程复杂,不能反映驱动的动态特性[2].2)通过对采集的路面数字图像信号进行分析得到路面特征[3].这种方法虽能够获得较好的判别效果,但需要很多附加设备,系统结构复杂,成本高.3)采用车辆动力学参数对路面状况进行预测[4-6].该方法不需要增加额外传感器,理论上可行,但在实际控制过程中受车辆参数影响较大,实际实施具有一定的难度.本文基于车轮扭矩传感器和汽车动力学原理,采用一次紧急加速法,进行了轮胎路面附着系数与滑转率关系曲线的快速道路实验测试.该方法较以往拖车法简便,且能真实反映汽车驱动过程的动态特性.
1 驱动轮最佳滑转率测试原理
1.1 驱动轮最佳滑转率测试系统
基于实验样车(以捷达GTX 轿车为例)设计了实验测试系统,如图1所示.汽车加速时的4个轮速信号、节气门开度信号和传动轴传给驱动轮的驱动力矩通过数据采集系统采集并通过串行通讯方式送至上位机,记录实验结果.
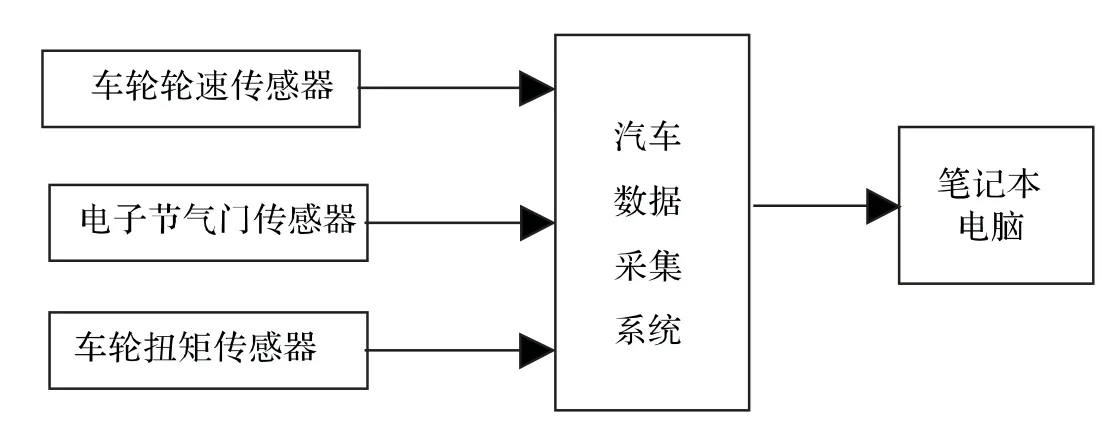
图1 测试系统Fig.1 Configuration of the measuring system
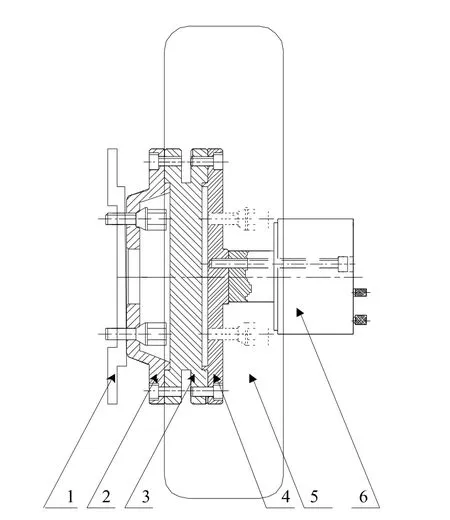
图2 扭矩传感器组成装配结构Fig.2 Assembling diagram of wheel torque sensor
实验中采用了SDI96360型车轮扭矩传感器[7],它用来测试汽车驱动时传动轴传给驱动轮的驱动力矩,主要包括扭矩传感器盘、轮辋连接盘和数字式FM 遥测装置3个部分,扭矩传感器总成实车连接如图2所示.该扭矩传感器采用了应力应变式测量法和非接触式遥感技术,可以测量构件的静态和动态应变,测量精度高,额定测量范围为±3 390Nm,最大转速为1 200r/min,满足轻型车路面纵向力的测试要求.扭矩传感器的FM 遥测装置由位于车轮处的发射器和位于驾驶室内的接收器组成,通过无线传输方式发送和接收采集到的传感器信号.扭矩传感器的测量力矩值T 与其输出电压的对应关系如式(1)所示.

式中,T 为扭矩传感器的测量力矩;K1和K2为传感器标定系数;U 为传感器输出模拟信号电压.
1.2 低附着路面上车轮路面附着系数和滑转率关系(μ-S)测试原理
汽车加速过程中驱动轮的受力如图3所示,忽略滚动阻力和差速器的内摩擦力矩,驱动轮的动力学方程为

式中,T 为驱动轮所受的驱动力矩;Fx为驱动轮受到的地面切向力;r为车轮滚动半径;I0为扭矩传感器中间盘至车轮的整体转动惯量;ω·为扭矩传感器中间盘至车轮的角加速度.
其中路面附着系数与路面给驱动轮的切向力关系为

式中,Fz为被测驱动轮受到的法向载荷;μ 为路面附着系数.联立(2)式和(3)式,得

由于实验中不能直接测量车轮垂直载荷,且实验汽车在直线加速行驶时车身加速度会导致前后车轮的垂直载荷发生变化,所以通过汽车动力学方程来确定车轮上的法向载荷FZ.汽车加速受力如图4所示.图中m 为汽车质量;G 为整车质量;Fxf为前轮所受切向力;Fxr为后轮所受切向力;a,b分别为前轴和后轴到车辆质心的距离;L 为轴距;hg为质心高度;u 为车辆纵向运动速度;Fzf,Fzr分别为单个前轮和后轮的地面支反力;Fw为空气阻力.
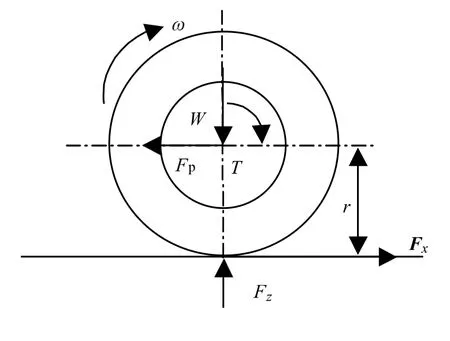
图3 驱动轮受力示意Fig.3 Force diagram of driving wheel
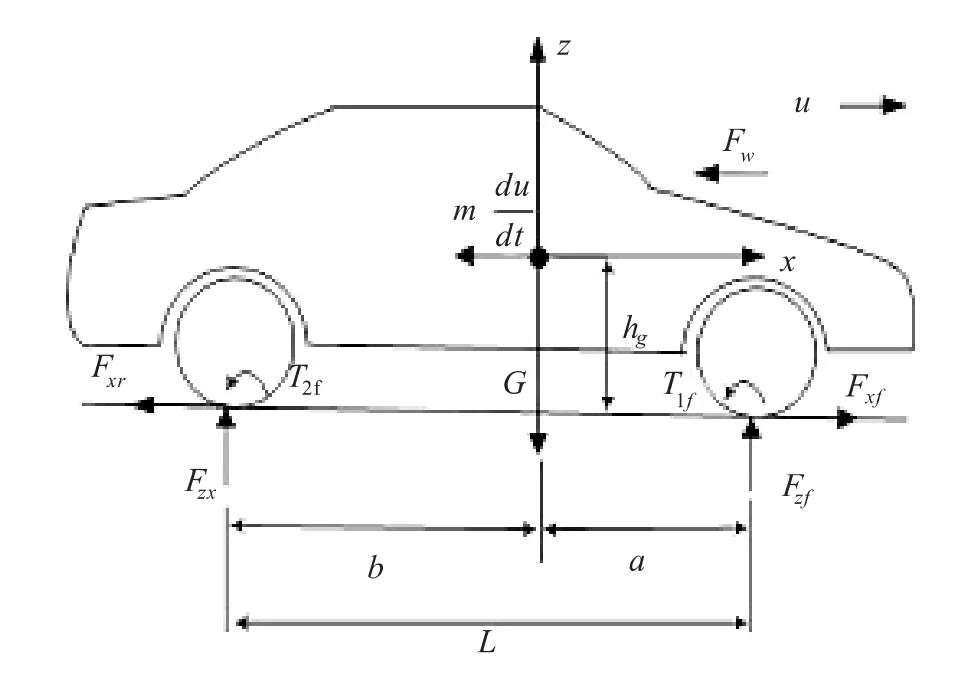
图4 整车驱动受力示意Fig.4 Force diagram of accelerating vehicle
计算时假设整车质心高度不变,且左右两侧车轮的载荷相等,忽略空气阻力和滚动阻力,则汽车前轮的法向载荷可由公式(5)计算得到

综合(4)式和(5)式可得到汽车加速行驶工况路面提供的附着系数

驱动轮的滑转率计算采用(7)式

式中,S 为驱动轮滑转率;v为车速;ωd为驱动轮角速度.
汽车加速实验时,可以利用轮速传感器采集驱动轮轮速(可计算驱动轮的角加速度)和从动轮轮速(可作为车速,并且经过差分可得车身加速度,然后通过分析驱动工况整车受力并考虑汽车加速时的轴荷转移来计算测试驱动轮的垂直载荷),利用扭矩传感器采集驱动轴传给驱动轮的力矩.将测试数据分别代入路面附着系数公式(6)和驱动轮滑转率公式(7),将路面附着系数和滑转率的对应数据作成曲线后即可得到相应的路面附着系数和滑转率的关系μ-S 曲线,并可确定驱动轮最佳滑转率.
2 实车实验及数据结果分析
2.1 实验过程
采用捷达GTX 轿车作为实验样车,将扭矩传感器安装在样车右前驱动轮的制动盘与轮辋之间,连接好数据采集系统.然后驾驶员将实验车辆挂一挡,松开油门踏板,让汽车在发动机怠速条件下缓慢行驶.待汽车右驱动轮缓慢行驶到相应的测试路面上,迅速踩下油门踏板,节气门增至较大开度,使处于低附着路面的右前驱动轮迅速滑转.采集系统记录加速实验过程中轮速、节气门开度和扭矩传感器等输出信号.为了研究低附着路面的μ-S 曲线的分布规律,在相同测试条件下进行不同载荷和不同节气门开度工况下的多次重复实验.其中,不同载荷采取在汽车内乘坐不同数目的乘员方法实现,不同节气门开度采用在加速踏板下面垫不同厚度的木板实现.经测试,由于在雨路面上实验车辆一挡快速加速时驱动轮不滑转,因此本文只进行冰、雪路面的实验研究.
2.2 实验数据结果处理及分析
根据本文1.2节提供的方法,将采集的数据分别代入公式(6)和(7),求得加速过程中相应路面的路面附着系数和驱动轮滑转率,并作出路面附着系数与驱动轮滑转率的关系曲线,如图5和图6所示.图5为驱动轮在冰路面上滑转时的μ-S 曲线,其中图a,b,c,d分别表示加速踏板踩到底且分别乘坐1,2,3和4人的μ-S 曲线;e图表示节气门开度迅速增至40°,乘坐2人的μ-S曲线;f图表示节气门开度迅速增至20°,乘坐2人的μ-S 曲线.图6为驱动轮在压实雪路面上滑转时的路面附着系数与驱动轮滑转率的关系曲线,其中图a,b,c,d分别表示加速踏板踩到底且分别乘坐1,2,3和4人的μ-S 曲线;图e表示节气门开度迅速增至40°,乘坐2人的μ-S 曲线;图f表示节气门开度迅速增至20°,乘坐2人的μ-S 曲线.将图5和图6的曲线中的峰值附着系数、最佳滑转率等相关数据进行对比,列于表1中.
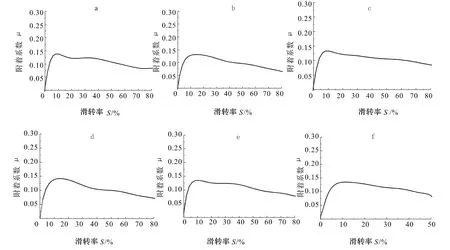
图5 驱动轮在冰路面上滑转时的μ-S 曲线Fig.5 μ-S curves of ice road
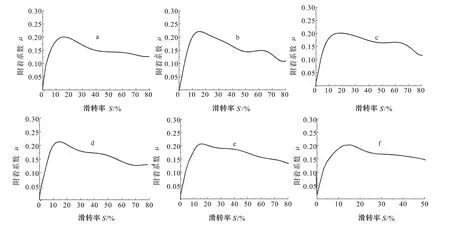
图6 驱动轮在雪路面上滑转时的μ-S 曲线Fig.6 μ-S curves of snow road
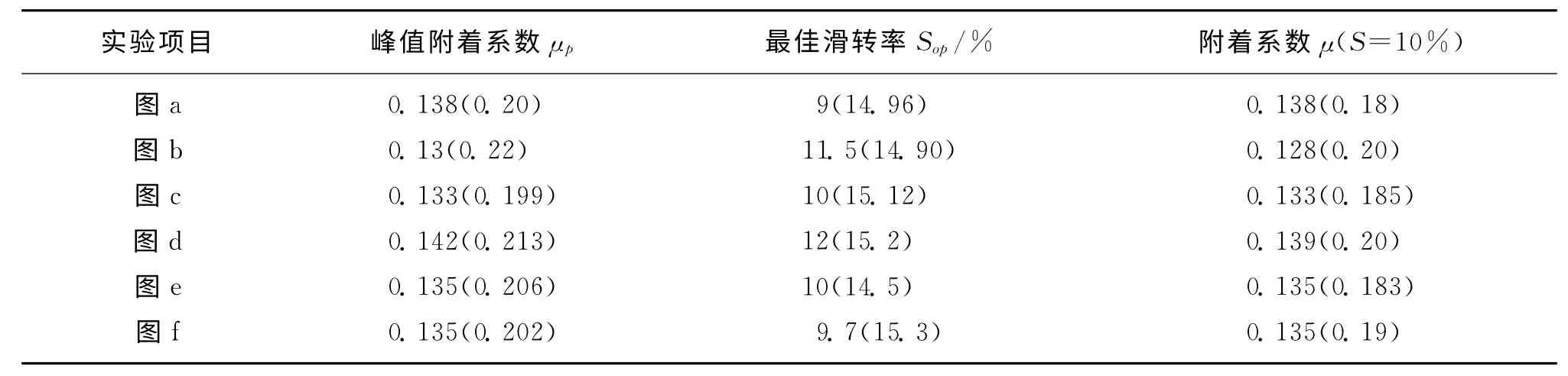
表1 低附着路面μ-S 曲线相关数据对比结果Tab.1 Contrast results ofμ-S curves on lowμroads
分析实验结果,可以得出:
1)冰路面的峰值附着系数在0.135左右,纵向最佳滑转率在10%左右.当驱动轮滑转率小于10%时,路面附着系数随滑转率增大而迅速增大;当驱动轮滑转率大于10%时,路面附着系数随滑转率增大而减小,当滑转率很大时,冰路面的附着系数保持在0.1左右.
2)雪路面的峰值附着系数在0.2左右,纵向最佳滑转率在15%左右.当驱动轮滑转率小于15%时,路面附着系数随滑转率增大而迅速增大;当驱动轮滑转率大于15%时,路面附着系数随滑转率增大而减小,当驱动轮滑转率很大时,雪路面的附着系数保持在0.15左右.
3)不同载荷和不同节气门开度工况对路面附着系数与驱动轮滑转率的关系基本没有影响.
4)冰、雪2种路面的理想滑转率范围存在一定的重合度.当选定10%为驱动轮最佳滑转率时,雪路面的附着系数占峰值附着系数的89%以上,冰路面的附着系数等于峰值附着系数,根据纵向附着系数和侧向附着系数的关系,此时的侧向附着系数也较大,因此以此滑转率为控制目标的汽车驱动防滑系统在纵向和侧向均能达到较好的效果.
图中相同路面曲线存在一些差异,是由路面不均匀引起的.另外,由于节气门开度很大时,发动机输出功率很大,驱动轮滑转严重,冰、雪路面提供的附着力很小,造成车速很低,计算得到的驱动轮滑转率大;节气门开度较小时,发动机输出功率较小,驱动轮滑转程度减小,冰、雪路面提供的附着力较大,车速相对高一些,因此根据滑转率计算公式可得,在图5和图6的曲线中节气门很大开度的驱动轮滑转率(横坐标)达到80%,而节气门较小开度的驱动轮滑转率(横坐标)最大达到50%.
3 结论
提出了基于车轮扭矩传感器和汽车动力学原理测试汽车加速工况下驱动轮附着系数和滑转率关系的实验方法.通过实车实验,测定了汽车不同载荷和不同节气门开度下的驱动轮在冰、雪路面上的附着系数和滑转率关系,得到了冰、雪路面上附着系数随驱动轮滑转率的变化规律以及驱动轮最佳滑转率的控制范围,为研究汽车驱动防滑控制系统确定了最佳滑转率控制目标.
[1] AUSTIN L,MORREY D.Recent advances in antilock braking systems and traction control systems[J].Proc Instn Mech Engrs D,2000,214:625-638.
[2] 吴诰珪.附着系数—滑移率曲线的测定[J].华南理工大学学报:自然科学版,2001,29(9):20-22.WU Gaogui.Measuring relationship between adhesion coefficient and slip rate[J].Journal of South China University of Technology,2001,29(9):20-22.
[3] 李虹.基于机器视觉路面状态识别关键技术研究[D].长春:吉林大学,2009.LI Hong.Research of road surface condition recognition key techniques based on machine vision[D].Changchun:Jilin University,2009.
[4] 张明星,宋健,赵六奇.汽车驱动防滑控制系统车轮最佳滑动率辨识方法[J].公路交通科技,2002(1):99-102.ZHANG Mingxing,SONG Jian,ZHAO Liuqi.Identification of optimal wheel slip rate in vehicle driving sliding control system[J].Journal of Highway and Transportation Research and Development,2002(1):99-102.
[5] 余卓平,左建令,张立军.路面附着系数估算技术发展现状综述[J].汽车工程,2006,28(6):546-549.YU Zhuoping,ZUO Jianling,ZHANG Lijun.A summary on the development status Quo of tire-road friction coefficient estimation techniques[J].Automotive Engineering,2006,28(6):546-549.
[6] 徐延海.基于轮速的路面状态识别方法[J].农业机械学报,2007,38(3):19-22.XU Yanhai.Identification of road adhesion coefficient based on wheel velocity[J].Transactions of the Chinese Society for Agriculture Machninery,2007,38(3):19-22.
[7] 崔海峰,刘昭度,王国业,等.基于扭矩传感器的汽车坡道起步辅助系统[J].仪器仪表学报,2006,27(10):1191-1193.CUI Haifeng,LIU Zhaodu,WANG Guoye,et al.Hill-start assist control system based on torque sensor for car[J].Chinese Journal of Scientific Instrument,2006,27(10):1191-1193.
猜你喜欢
中国农机化学报(2024年5期)2024-05-30 23:51:14
汽车实用技术(2022年5期)2022-04-02 09:36:40
汽车实用技术(2022年5期)2022-04-02 09:36:20
装备制造技术(2020年9期)2021-01-26 00:15:08
重庆交通大学学报(自然科学版)(2020年8期)2020-08-24 00:59:34
中国新技术新产品(2020年4期)2020-05-05 15:49:48
汽车维护与修理(2019年3期)2019-08-08 02:29:02
农机化研究(2018年10期)2018-08-10 09:23:02
汽车维护与修理(2018年19期)2018-04-28 01:21:40
汽车维修与保养(2015年1期)2015-04-17 03:25:34