基于联合控制的汽车驱动防滑控制仿真
2014-07-24 05:51:24侯顺艳李志远韩晓霞
河北大学学报(自然科学版) 2014年2期
侯顺艳,李志远,韩晓霞
(1.河北大学 电子信息工程学院,河北 保定 071002;2.河北大学 质量技术监督学院,河北 保定 071002)
汽车驱动防滑系统(acceleration slip regulation,简称ASR)是汽车主动安全控制的重要组成部分,它能够在车辆驱动过程中限制驱动轮过度滑转,提高车辆的加速性和方向稳定性.驱动防滑控制系统可以通过调节驱动轮的输出功率,控制驱动轮最佳滑转率使汽车获得最佳的牵引性能[1].目前,调节驱动轮输出功率的方式主要有发动机输出转矩调节、驱动轮制动力矩调节以及离合器和变速器控制等3种[2].发动机输出扭矩调节是最早的控制方式,适合于两驱动轮均在低附着系数路面加速工况或车速较高时的加速工况.驱动轮制动力矩调节是在打滑的驱动轮上施加制动力矩,其实质是差速控制作用,较适合两侧附着系数差别较大的对开路面.离合器和变速器控制方法反应慢,不易控制.因此,比较理想的方法是根据不同工况采用联合控制.本文将基于发动机节气门调节和驱动轮制动力矩调节的联合控制方式进行ASR 仿真研究.通过仿真实验验证控制算法,确定控制参数,对缩短ASR 系统开发周期和减少开发成本,具有重要意义.
1 车辆动力学建模
汽车驱动防滑控制主要是对汽车纵向力的控制,包括驱动力和制动力.系统动力学模型是车辆纵向力控制研究的基础.本文以捷达GTX 轿车为原型,主要建立包括发动机模型、传动系模型、制动系统模型、轮胎模型和整车模型在内的车辆系统动力学模型[3-4].
1.1 发动机模型
发动机模型主要是指在一定的节气门开度和发动机转速下的发动机输出扭矩函数,即

式中,f(ωe,α)为发动机关于节气门开度和转速的转矩特性函数;ωe为发动机转速;α为节气门开度;Tes为发动机曲轴稳态输出转矩.通过实验可得到捷达GTX 轿车发动机关于节气门开度和转速的扭矩特性,如图1所示.根据此特性图建立二维查表模块,通过查表可以得到某一时刻的发动机转速和节气门开度对应的发动机曲轴稳态输出转矩值.
1.2 节气门模型
电子节气门模型采用了电机控制PWM 占空比与节气门开度之间关系的二阶系统模型

式中,α为节气门开度;λm为输入占空比;Gth(s)为节气门传递函数;h(s)为单位阶跃函数.
1.3 整车模型
整车动力学模型是车辆运动状态的一种数学描述,能够较为精确地给出车辆在空间中所受外力情况下的动态响应.考虑车身的纵向平移、横向平移和绕Z 轴的横摆运动,4个车轮的旋转运动,建立7自由度整车模型,如图2所示.各自由度动力学微分方程如下:

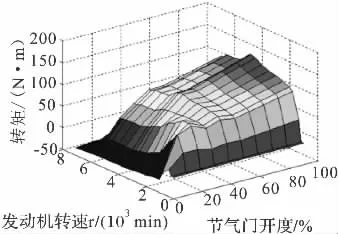
图1 发动机转矩模型Fig.1 Engine torque characteristics model

图2 7自由度整车模型受力示意Fig.2 Dynamic model of the 7DOF vehicle
式中,m 为汽车质量;Iz为车辆绕Z 轴的转动惯量;δ为前轮转向角;Fxlf,Fxrf,Fxlr,Fxrr分别为左前轮、右前轮、左后轮、右后轮所受纵向力;Fylf,Fyrf,Fylr,Fyrr分别为左前轮、右前轮、左后轮、右后轮所受侧向力;Bf,Br为车辆前后轮距;a,b分别为前、后轴到车辆质心的距离;u,v分别为车辆纵向、侧向速度;ax,ay为车辆纵向、侧向加速度;分别为左前、右前、左后、右后车轮角加速度;Ttlf,Ttrf分别为左、右驱动轮所受驱动力矩;Tblf,Tbrf分别为左、右驱动轮所受制动力矩;Tflf,Tfrf,Tflr,Tfrr分别为作用在4个车轮上的滚动阻力矩;r为车轮滚动半径.
1.4 轮胎模型
目前采用的轮胎模型有多种形式,魔术公式是其中代表之一.魔术公式是用三角函数的组合公式拟合轮胎的实验数据而得到的一套公式,该公式可以表达出轮胎的力特性,统一性强,需拟合的参数少,各个参数具有较明确的意义,拟合精度较高.其表达式为[4]

式中,Y 为地面纵向作用力、侧向作用力或者回正力矩;x 为轮胎滑移率或侧偏角;B 为刚度系数;C 为形状系数;D 为峰值系数;E 为曲率系数.B,C,D,E 在低附着路面分别取10,1.45,0.1和0.2;在高附着路面分别取13,1.65,0.86和0.3.
1.5 传动系统模型
发动机输出力矩通过离合器、变速器、主减速器传递到差速器壳体,最后通过驱动轴传递到驱动轮.忽略传动过程中的冲击与扭振,近似认为刚性传递力矩,动力学模型简化为

式中,Tt为发动机曲轴输出转矩;i0为主减速器传动比;ig为变速器传动比;ηt 为传动效率;其他参数意义同前.
1.6 制动系统模型
ASR 主动制动功能是通过不断地对制动器轮缸进行压力调节来控制驱动轮滑转率.调节分为3种工况:增压、减压和保压.文献[5]在理论分析的基础上,获得了MK20-I/E+型压力调节器在PWM 控制下轮缸压力调节经验模型.
1)减压调节过程

2)增压调节过程

靠训练实践磨砺血性胆魄。坚持仗怎么打兵就怎么练,坚持从难从严从实战需要出发摔打部队,加大训练演习难度强度险度,加大野外艰苦环境、复杂电磁环境、陌生地域海域空域演训力度,研发运用好信息化智能化虚拟仿真演训系统和平台,开展实战化对抗性演训。进一步端正教风研风学风、训风演风考风,防止和克服教学科研、训练演习中的形式主义、消极保安全和弄虚作假等不良风气。
捷达GTX 轿车前轮采用浮动钳盘式制动器,制动器制动压力与制动力矩关系为

式中,Tbf为盘式制动器的制动力矩,Pc为轮缸压力.
2 驱动防滑模糊PID 控制算法
由于模糊控制和PID 控制均具有控制方式简单、鲁棒性好、无需被控对象的数学模型、适合解决非线性问题等优点,本文将二者结合起来,采用模糊PID 控制算法,可以充分发挥模糊控制自适应能力强和PID 控制静态稳定性好的优点.
ASR模糊控制器以驱动轮的滑转率作为控制量,采用双输入单输出的二维模糊控制器,输入语言变量为驱动轮实际滑转率与期望滑转率的误差e及其变化率ec(即ec(k)=e(k)-e(k-1)),输出语言变量为控制执行机构的PWM 信号占空比u.实际控制中,驱动轮的滑转率变化范围为0~1,由实验测试选取低附着路面的最佳滑转率为0.1,因此低附着路面上驱动轮实际滑转率与期望滑转率的误差e的论域为[-0.1,0.9],滑转率的误差变化率ec的论域为[-1,+1],输出占空比u 的论域为[-1,+1].将输入、输出变量的值进行量化,误差的量化论域为[-1,9],误差变化率和输出占空比的量化论域为[-6,+6],选取量化因子分别为ke=10,kec=6和ku=1/6.将滑转率误差的变化率和输出语言变量的模糊子集均分为7级,表示为NB,NM,NS,ZO,PS,PM,PB.驱动轮实际滑转率与期望滑移率误差e的语言子项取6个,即NB,NM,ZO,PS,PM,PB.为了确定较合理的隶属函数,首先做一些驱动轮在低附着路面滑转的实车实验,然后根据实际实验数据以及驾驶员的经验确定滑转率误差和误差变化率等级的语言表示值.最终确定输入语言变量和输出语言变量的隶属函数如图3所示.模糊控制器采用Mamdani推理形式,控制规则为“if e and ec then u”.合成规则采用“max-min”法,制订了42条模糊控制规则,如表1和表2所示,解模糊采用重心法.

图3 模糊控制器输入、输出隶属度函数Fig.3 Membership function of inputs and outputs

表1 ASR 节气门干预模糊控制规则Tab.1 Rules for engine throttle regulation
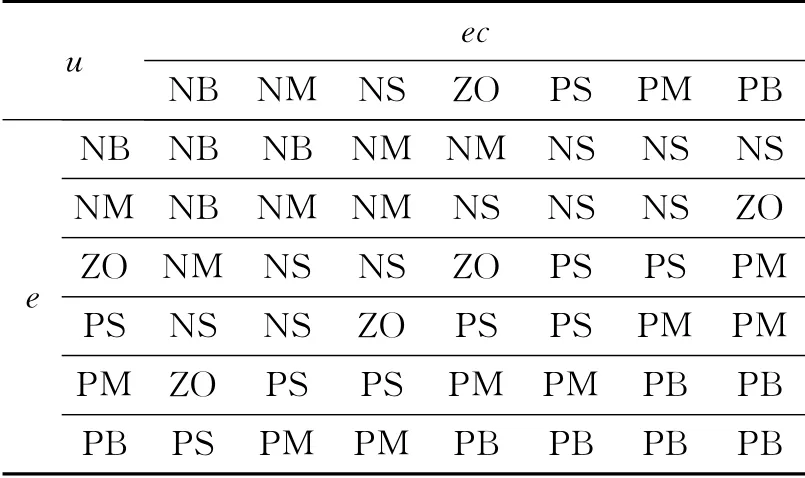
表2 ASR 制动干预模糊控制规则Tab.2 Rules for braking torque control
设计ASR 控制器模糊PID 开关切换控制,输入为驱动轮实际滑转率与期望滑转率的偏差和偏差变化率,输出为节气门和制动压力PWM 控制占空比,如图4所示.其控制思想是在大误差范围内采用模糊控制,在小误差范围内切换为PID 控制.PID 控制器采用位置式数字PID 控制算法,控制器从模糊控制状态向PID 控制状态切换的条件选取为:e(k)=ZO and NS<ec(k)<PS.

图4 ASR 模糊PID控制原理Fig.4 Structure of ASR controller based on fuzzy PID
3 仿真实验
根据上述建立的系统动力学微分方程和控制算法模型,基于matlab/simulink搭建仿真模型,分别进行单一低附着路面和对开路面加速工况的有、无ASR 控制的仿真实验.仿真过程所需参数如表3所示.其中单一低附着路面防滑控制采用发动机节气门调节控制,对开路面采用制动干预控制.仿真过程中,分别选取单一低附着路面(峰值附着系数为0.2)和对开路面(左、右峰值附着系数分别为0.8和0.2)路况,目标滑转率为10%;汽车挂一挡以10km/h的初速度分别匀速平稳驶入2种路面后,迅速踩下油门踏板至40°,保持油门踏板开度,汽车直线加速行驶.仿真结果如图5~8所示.

表3 捷达GTX 轿车主要参数Tab.3 Main parameters of dynamics system of Jetta-GTX[6]

图5 单一低附着路面无ASR 控制仿真曲线Fig.5 Simulation curves of non-ASR on low-μroad

图6 单一低附着路面ASR 控制仿真曲线Fig.6 Simulation curves of throttle control for ASR on low-μroad

图7 对开路面无ASR 控制仿真曲线Fig.7 Simulation curves of non-ASR on split-μroad

图8 对开路面ASR 控制仿真曲线Fig.8 Simulation curves of brake control for ASR on split-μroad
4 结论
通过分析ASR 控制方式的特点设计了基于节气门和制动联合控制的汽车驱动防滑控制系统.建立了防滑控制系统的动力学模型和控制器模型,并进行了低附着和对开路面工况的仿真对比实验.实验结果表明,采用模糊PID 控制算法,通过节气门干预控制和对滑转驱动轮进行制动干预控制,能够有效控制汽车在低附着路面上加速时驱动轮过度滑转,使驱动轮充分利用地面附着力,大大提高了汽车在单一低附着路面和对开路面上的加速性能,验证了ASR 控制算法和控制策略的合理性,为开发实际控制器提供了依据.
[1] 王德平,郭孔辉,高振海.汽车驱动防滑控制系统[J].汽车技术,1997(4):22-27.WANG Deping,GUO Konghui,GAO Zhenhai.Automobile anti-slip regulation system [J].Automobile Technology,1997(4):22-27.
[2] 尹安东,孙骏,赵虎,等.汽车驱动防滑控制系统的控制模式与技术[J].合肥工业大学学报:自然科学版,2004,27(3):325-329.YIN Andong,SUN Jun,ZHAO Hu,et al.Control patterns of the automobile anti-slip regulation system and key technologies[J].Journal of Hefei University of Technology,2004,27(3):325-329.
[3] 李志远.捷达GTX 轿车驱动防滑控制技术研究[D].北京:北京理工大学,2008.LI Zhiyuan.Research on the anti-slip system technology of JETTA GTX vehicle[D].Beijing:Beijing Institute of Technology,2008.
[4] LI Jingliang,LIU Zhaodu,LI Zhiyuan.Vehicle dynamics modeling and simulation for ACC[J].Journal of Beijing Institute of Technology,2010,19(1):53-57.
[5] 崔海峰.汽车ABS/ASR 集成系统及轮缸压力精细调节研究[D].北京:北京理工大学,2006.CUI Haifeng.Research on ABS/ASR integrated system and pressure fine regulation for motor vehicles[D].Beijing:Beijing Institute of Technology,2006.
[6] 一汽大众汽车有限公司.中国轿车丛书—捷达[M].北京:北京理工大学出版社,1998.FAW Volkswagen Automotive Co.Ltd.China car series Jetta[M].Beijing:Beijing Institute of Technology Press,1998.
猜你喜欢
中国农机化学报(2024年5期)2024-05-30 23:51:14
汽车实用技术(2022年5期)2022-04-02 09:36:40
汽车实用技术(2022年5期)2022-04-02 09:36:20
装备制造技术(2020年9期)2021-01-26 00:15:08
重庆交通大学学报(自然科学版)(2020年8期)2020-08-24 00:59:34
中国新技术新产品(2020年4期)2020-05-05 15:49:48
汽车维护与修理(2019年3期)2019-08-08 02:29:02
农机化研究(2018年10期)2018-08-10 09:23:02
汽车维护与修理(2018年19期)2018-04-28 01:21:40
汽车维修与保养(2015年1期)2015-04-17 03:25:34