
基于多磁传感器的智能航向测定系统*
2014-07-18 11:03朱国魂陈孔阳
传感器与微系统 2014年4期
吴 静, 朱国魂, 谢 波, 陈孔阳
(1.桂林电子科技大学 电子工程与自动化学院,广西 桂林 541004;2.中国科学院 深圳先进技术研究院,广东 深圳 518005)
基于多磁传感器的智能航向测定系统*
吴 静1,2, 朱国魂1, 谢 波2, 陈孔阳2
(1.桂林电子科技大学 电子工程与自动化学院,广西 桂林 541004;2.中国科学院 深圳先进技术研究院,广东 深圳 518005)
为了实现在强磁干扰环境下准确且智能地测定航向角,从影响磁传感器测定航向角精度的诸多因素分析,采用经典的基于椭圆拟合的校正算法,设计了一种由6只磁传感器围成一个圆的多磁传感器的自动磁校正设备。提出了一种有效的误差补偿技术和准确、智能的测定航向角的方法,避免了手动旋转单只磁传感器来采集不同方向的磁场的操作。多次实验结果表明:在室内强干扰环境中,这种校正技术补偿后的航向误差从150°降低到2.5°。
磁传感器; 磁干扰; 自动校正; 航向角
0 引 言
准确的航向角信息对于许多移动服务是至关重要的,如导航、车辆、船舶和机器人应用等。根据地磁原理计算航向角的磁力计是最常用的方向测量传感器,相较于其他方向测量系统(如 GPS 方位测量系统[1]、惯性指北方位系统[2]),磁传感器具有体积小、重量轻、无误差积累等诸多优点,在抗冲击、抗振动与其他电子设备组合等方面也表现出优良的特性[3]。但磁传感器所使用位置的地磁场很容易受到各种铁磁、电磁的影响而产生畸变,以及磁传感器制作工艺、电子线路的差异,致使磁传感器测定的航向与实际地理方向之间存在误差,影响航向测量的精度[4]。磁传感器测定航向信息的一般方法是通过一个三轴磁传感器绕着一个轴或多个轴旋转,测量多个方向的磁场量。随后采用校正算法对测量模型各个参数进行辨识。因此,本文提出了一种基于椭圆假设的自适应校正算法。一方面采用最小二乘椭球拟合算法,通过磁传感器测得的磁场量对各种磁误差和磁干扰进行补偿和消除;另一方面,使用多磁传感器校正技术自适应地计算不同磁干扰下的磁航向角,避免了在某采样点处手动地旋转磁传感器获得多方向的磁场量的繁琐操作。
1 误差分析和补偿算法
在理想情况下,磁传感器仅受到地磁场的作用,如图1所示,在俯仰角和横滚角都为0°时,磁传感器测得的X轴和Y轴上的磁场分量分别为
Hx=HNorthcosψ,
(1)
Hy=HNorthsinψ,
(2)
式中HEarth为地磁场向量,指向地心;HNorth为地磁场向量水平分量,指向磁北极;航向角ψ为地磁场向量水平上分量与其X轴的夹角,即
ψ=arctan(Hy/Hx).
(3)
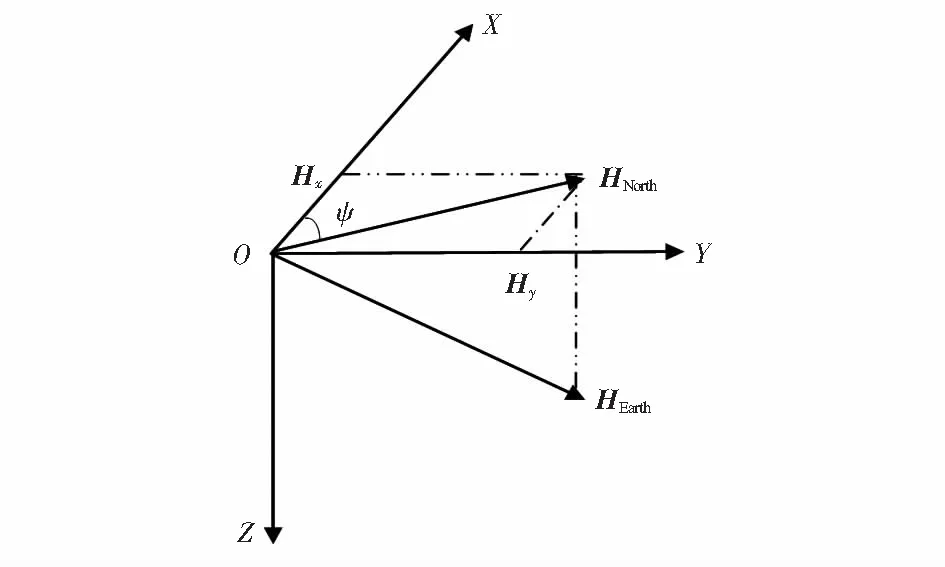
图1 地磁场向量分解示意图Fig 1 Vector decomposition diagram of earth magnetic field
此时磁传感器X轴和Y轴输出的对应关系可以表示为极坐标系下以ψ为参数的圆[5],圆半径为向量HEarth的模。
考虑到误差因素时,X轴和Y轴输出的对应关系是一个中心偏离原点的椭圆[6],磁传感器测量值Hx1和Hy1与地磁场向量X轴和Y轴分量Hx,Hy之间有以下的关系
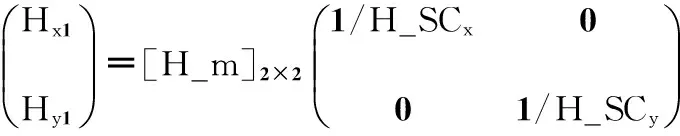
(4)
式中 [H_m]为磁传感器敏感轴非正交性误差将圆转过一个角度;H_SCi(i=x,y)为敏感轴灵敏度误差,使得圆沿着某个方向拉伸或压缩变成一个椭圆;H_OSi(i=x,y)为磁传感器安装载体上硬磁材料引起的硬磁干扰,使得椭圆中心位置发生偏移;[H_Si]为软磁材料引起的软磁干扰,使得椭圆转过一个角度[6,7]。
将式(4)改写为
Hs=AH-b,
(5)
则
H=A-1(Hs+b),
(6)
HTH-B0=0.
(7)
由此可知,基于椭圆假设的磁校正就是求出相应地误差系数a11,a12,a21,a22,bx,by。根据椭圆假设,可以得到拟合的椭圆方程[8,9]如下
M1(Hx1)2+M2(Hy1)2+M4(Hx1)(Hy1)+M3(Hx1)+
M5(Hy1)+M6=0.
(8)
根据式(6)和式(7)可以得到中间参数M1,M2,M3,M4,M5,M6与误差系数的关系式
(9)
中间参数的求解可以通过旋转磁传感器,在0°~360°范围内采集至少6个方向的磁向量,再利用式(8)和最小二乘法估计最佳值[8]。因此,校正后的地磁场向量可以通过式(6)计算出来。
2 磁校正平台的设计
本文设计了一种基于多磁传感器的智能测定航向角的平台,主要采用6只磁传感器围成一个圆,每只磁传感器的X轴间隔60°,采集不同方向的磁向量,如图2所示,6只磁传感器的X轴和Y轴都在同一个平面内,每只传感器的Z轴都垂直纸面向里。相对于单只磁传感器,这种设计可以有效地避免在采样点处手动的旋转磁传感设备来采集不同方向的磁数据计算航向角。

图2 6只磁传感器的几何分布图Fig 2 Geometry distribution of six magnetic sensors
为了使多磁传感器平台在多方向上同时采集的数据进行准确有效地校正和补偿,本文提出了一种自适应误差校正技术,主要包括以下2个步骤:1)在无磁干扰的环境下或多磁传感器平台周围无磁干扰的情况下,对多磁传感器平台在水平面上旋转一周,即每个磁传感器绕着Z轴旋转一周,再利用前面提到的基于椭圆拟合的最小二乘法对每只磁传感器进行校正计算出校正参数,这种情况下的磁校正是对传感器的仪表误差的补偿和电路板上产生的软磁干扰和硬磁干扰的校正,并消除每只磁传感器间的差异。2)在自校正后,即每只磁传感器采集到的磁向量利用相对应的传感器计算出的校正参数进行校正,此时的多磁传感器平台可以看做作是能同时采集多方向磁数据的“集成磁力计”,然后对“集成磁力计”6个方向的磁数据再一次利用基于椭圆拟合的最小二乘法对环境中的软磁材料和硬磁材料引的磁干扰进行联合校正,并计算航向角。
3 实测数据校正结果和分析
3.1 磁校正平台的自校正结果和分析
为了方便研究,本文提出的自适应校正技术都是在俯仰角和横滚角为的0°的情况下进行的。图3所示为在多磁传感器平台周围无磁干扰的情况下,每只磁传感器绕着Z轴旋转一周,使用校正算法进行自校正前后的航向误差,图3(a)表示自校正前的航向误差,图3(b)为自校正后的航向误差。由图3(a)可以看出:传感器的仪表误差和电路板上产生的软磁干扰和硬磁干扰引起的航向误差在±60°的范围内。而图3(b)所示为与图3(a)所对应的校正后的航向误在±2.5°的范围内。因此,由图3可以看出:基于椭圆拟合的最小二乘法的校正算法的可行性和有效性。

图3 在无磁干扰的环境下6只磁传感器校正前后的航向误差Fig 3 Heading errors of six magnetometers before and after calibration in a magnetic field perturbation free
3.2 实测数据联合校正结果和分析
为了验证本文提出的基于多磁传感器的自动磁校正技术的有效性,该多磁传感器校正设备分别在无磁干扰和有磁干扰的环境下进行实验。在空旷的草坪环境下,即磁校正设备周围没有磁干扰的情况下,采用本文提出的磁校正技术校正前后的航向误差如图4所示,图4(a)中为实测数据未校正时的航向误差图,该误差主要来源于传感器的仪表误差和设备上的磁干扰。图4(b)中为实测数据进行联合校正后的航向误差图,此时航向误差在±1°范围内,使航向误差减小了近40倍。

图4 无磁干扰的环境下采用自动磁校正技术校正前后的航向误差Fig 4 Heading errors before and after automatic magnetic calibration in magnetic perturbation free environment
在室内环境下,往往存在很多强磁干扰源,如电梯、电线电缆、钢筋建筑材料和电子设备等[10],因此,本文另一实验选在磁校正难度较大的室内办公环境下进行。如图5所示为室内实验环境,圆圈内为多磁传感器自动校正设备,此时较强的干扰源有手机、电脑、钢筋建筑材料等。在这样的较强的磁干扰环境下,图6所示为采用磁校正技术校正前后的航向误差图,图6(a)为实测数据未校正时的航向误差图,通过与图4(a)对比可以看出:传感设备很明显受到环境中的磁干扰使得航向误差达到了150°。图6(b)为实测数据进行联合校正后的航向误差图,表明对传感器仪表误差,设备上的磁干扰和环境中的磁干扰校正后航向误差在±2.5°的范围内。另外,在室内办公环境下,不同地方多次实验表明航向误差均能在±2.5°的稳定范围内。

图5 有强磁干扰的室内测试环境Fig 5 Indoor testing environment with serious magnetic interference

图6 有强磁干扰的环境下,采用自动磁校正技术校正前后的航向误差Fig 6 Heading errors before and after automatic magnetic calibration in strong magnetic perturbation environment
4 结 论
本文研究了基于椭圆假设的最小二乘算法求解误差系数的方法和误差补偿的方法,并提出了一种基于多磁传感器的自动磁校正技术和多磁传感器平台的设计方案,该方法实现了自动误差补偿和自动校正以及自动计算航向角,避免了手动旋转单只磁传感器来采集不同方向的磁场计算航向角的操作。通过以上的实验和分析表明:该校正技术符合实际情况,磁校正效果显著,对最大航向误差为150°进行自动补偿后,其航向误差只有2.5°,并且,本文提出的基于多磁传感器的自动磁校正设备具有可靠性高和使用方便的特点。
[1] Yoon S,Lundberg J B.Euler angle dilution of precision in GPS attitude determination[J].IEEE Transactions on Aerospace and Electronic System,2001,37(3):1077-1083.
[2] Briting K R.Inertial navigation system analysis[M].New York:Wiley Interscience,1971:25-29.
[3] 李希胜,王家鑫,汤 程,等.高精度磁电子罗盘的研制[J].传感技术学报,2006,19(6):2441- 2444.
[4] 晁 敏,蒋东方,文彩虹.磁罗盘误差分析与校准[J].传感技术学报,2010,23(4):525-532.
[5] 刘诗斌,冯晓毅,李 宏.基于椭圆假设的电子罗盘误差补偿方法[J].传感器技术,2002,21(10):28-30.
[6] 盛庆轩,吴美平,李 涛,等.基于椭圆假设的磁强计罗差校正实验研究[J].传感器与微系统,2009,28(10):46-48.
[7] Gebre-Egziabher D,Elkaim G H,Powell J D,et al.A non-linear,two-step estimation algorithm for calibrating solid-state strapdown magnetometers[C]∥Proc of the 8th International St.Petersburg Conference on Navigation Systems,St.Petersburg, Russia,2001:290-297.
[8] Fosier C C,Elkaim G H.Extension of a two-step calibration methodology to include nonorthogonal sensor axes[J].IEEE Transactions on Aerospace and Electronic System,2008,44(3):1070-1078.
[9] Pang Hongfeng,Li Ji,Chen Dixiang,et al.Calibration of three-axis fluxgate magnetometers with nonlinear least square method[J].Measurement,2013,46(4):1600-1606.
[10] Renaudin V,Afzal M H, Lachapelle G.New method for magnetometers based orientation estimation[C]∥Proc of the 2010 IEEE/ION Position Location and Navigation Symposium(PLANS),Palm Springs,CA,USA,2010:348-356.
Intelligent heading measuring system based on multiple magnetic sensor*
WU Jing1,2, ZHU Guo-hun1, XIE Bo2, CHEN Kong-yang2
(1.School of Electronic Engineering and Automation,Guilin University of Electronic Technology, Guilin 541004,China; 2.Shenzhen Institutes of Advanced Technology, Chinese Academy of Sciences,Shenzhen 518005,China)
In order to measure heading angle accurately and intelligently in strong magnetic perturbed environment,analyze numerous factors which influence heading angle measurement precision of magnetic sensor,and present use classic calibration algorithm based on ellipse fitting,and design a multiple magnetic sensor auto calibration device,which composed of six magnetic sensors form a circle.Present an effective error compensation technology and accurate and intelligent method for heading anglemeasurement,which avoids manual operation rotating of a single magnetic sensor to collect magnetic field in different directions.The intelligent heading measuring system is tested repeatedly and verified in strong magnetic perturbed environment,this calibration technology reduces the original heading error from 150° to 2.5°.
magnetic sensor; magnetic disturbance; automatic calibration; heading angle
2013—08—30
广西科学研究与技术开发计划资助项目(1114006—3C)
TP 212
A
1000—9787(2014)04—0106—03
吴 静(1987-),女,湖北武汉人,硕士研究生,现为中国科学院深圳先进技术研究院客座学生,研究方向为智能传感器与嵌入式系统。
猜你喜欢
数学杂志(2022年5期)2022-12-02
舰船科学技术(2022年10期)2022-06-17
新世纪智能(高一语文)(2021年3期)2021-07-16
中学生数理化(高中版.高二数学)(2021年12期)2021-04-26
国学(2020年1期)2020-06-29
民用飞机设计与研究(2019年4期)2019-05-21
中学数学杂志(2019年1期)2019-04-03
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18
电子制作(2017年24期)2017-02-02
